Download as pdf or txt
You might also like
- Memo For Hand Receipt HoldersDocument10 pagesMemo For Hand Receipt HoldersTerrence StaplesNo ratings yet
- RTN TrainingDocument67 pagesRTN TrainingAhmad Husain Hijazi75% (4)
- A Distribution-Based Clustering Algorithm For Mining in Large Spatial DatabasesDocument8 pagesA Distribution-Based Clustering Algorithm For Mining in Large Spatial DatabasesMuhammad Kevin Adnan MurbiantoroNo ratings yet
- GDBSCANDocument30 pagesGDBSCANkkoushikgmailcomNo ratings yet
- ST-DBSCAN: An Algorithm For Clustering Spatial-Temporal DataDocument14 pagesST-DBSCAN: An Algorithm For Clustering Spatial-Temporal Datajose puma chavezNo ratings yet
- An Efficient Enhanced K-Means Clustering AlgorithmDocument8 pagesAn Efficient Enhanced K-Means Clustering Algorithmahmed_fahim98No ratings yet
- Pam Clustering Technique: Bachelor of Technology Computer Science and EngineeringDocument11 pagesPam Clustering Technique: Bachelor of Technology Computer Science and EngineeringsamakshNo ratings yet
- OPTICS: Ordering Points To Identify The Clustering StructureDocument12 pagesOPTICS: Ordering Points To Identify The Clustering StructureqoberifNo ratings yet
- Effective Ed ClusteringDocument10 pagesEffective Ed ClusteringEugene PirogovNo ratings yet
- Cluster Analysis ClusteringDocument6 pagesCluster Analysis Clustering17CSE97- VIKASHINI TPNo ratings yet
- Recursive Hierarchical Clustering AlgorithmDocument7 pagesRecursive Hierarchical Clustering Algorithmreader29No ratings yet
- Partitioning MethodsDocument26 pagesPartitioning MethodsAhmed hussainNo ratings yet
- Ambo University: Inistitute of TechnologyDocument15 pagesAmbo University: Inistitute of TechnologyabayNo ratings yet
- An Empirical Evaluation of Density-Based Clustering TechniquesDocument8 pagesAn Empirical Evaluation of Density-Based Clustering Techniquessuchi87No ratings yet
- Cluster Evaluation Techniques: Atds AssignmentDocument4 pagesCluster Evaluation Techniques: Atds AssignmentArcha ShajiNo ratings yet
- Efficient Hierarchical Clustering of Large Data Sets Using P-TreesDocument4 pagesEfficient Hierarchical Clustering of Large Data Sets Using P-Treesnobeen666No ratings yet
- A Novel Approach of Implementing An Optimal K-Means Plus Plus Algorithm For Scalar DataDocument6 pagesA Novel Approach of Implementing An Optimal K-Means Plus Plus Algorithm For Scalar DatasinigerskyNo ratings yet
- A Parallel Study On Clustering Algorithms in Data MiningDocument7 pagesA Parallel Study On Clustering Algorithms in Data MiningAnu IshwaryaNo ratings yet
- 1 A Modified VersionDocument7 pages1 A Modified VersionEdwardNo ratings yet
- Hierarchical Clustering PDFDocument5 pagesHierarchical Clustering PDFLikitha ReddyNo ratings yet
- DM Clustering UNIT4Document36 pagesDM Clustering UNIT4sriramr2508No ratings yet
- By Lior Rokach and Oded Maimon: Clustering MethodsDocument5 pagesBy Lior Rokach and Oded Maimon: Clustering MethodsRohit PaulNo ratings yet
- C: A Hierarchical Clustering Algorithm Using Dynamic ModelingDocument22 pagesC: A Hierarchical Clustering Algorithm Using Dynamic ModelingJibesh Kumar BasuriNo ratings yet
- Embed and Conquer: Scalable Embeddings For Kernel K-Means On MapreduceDocument9 pagesEmbed and Conquer: Scalable Embeddings For Kernel K-Means On MapreducejefferyleclercNo ratings yet
- A Novel Approach For Data Clustering Using Improved K-Means Algorithm PDFDocument6 pagesA Novel Approach For Data Clustering Using Improved K-Means Algorithm PDFNinad SamelNo ratings yet
- Clustering Techniques and Their Applications in EngineeringDocument16 pagesClustering Techniques and Their Applications in EngineeringIgor Demetrio100% (1)
- Comparison of Density-Based Clustering Algorithms: Mariam RehmanDocument5 pagesComparison of Density-Based Clustering Algorithms: Mariam RehmansuserNo ratings yet
- A Fully Autonomous Data Density Based Clustering Technique: R.hyde1@lancaster - Ac.uk P.angelov@lancaster - Ac.ukDocument8 pagesA Fully Autonomous Data Density Based Clustering Technique: R.hyde1@lancaster - Ac.uk P.angelov@lancaster - Ac.ukirwhandiNo ratings yet
- Genetic Algorithm-Based Clustering TechniqueDocument11 pagesGenetic Algorithm-Based Clustering TechniqueArmansyah BarusNo ratings yet
- Density-Based Clustering Algorithms Are The Algorithms Which AreDocument1 pageDensity-Based Clustering Algorithms Are The Algorithms Which Areshyamd4No ratings yet
- DWDM Unit-5Document52 pagesDWDM Unit-5Arun kumar SomaNo ratings yet
- Enhancing The Exactness of K-Means Clustering Algorithm by CentroidsDocument7 pagesEnhancing The Exactness of K-Means Clustering Algorithm by CentroidserpublicationNo ratings yet
- 10 Marks QuestionsDocument19 pages10 Marks QuestionsAnupriya VeerasamyNo ratings yet
- 期末報告-02clustering and Anomaly Detection Method Using Nearest and Farthest NeighborDocument15 pages期末報告-02clustering and Anomaly Detection Method Using Nearest and Farthest Neighbor鄭毓賢No ratings yet
- A Comparative Study of K-Means, K-Medoid and Enhanced K-Medoid AlgorithmsDocument4 pagesA Comparative Study of K-Means, K-Medoid and Enhanced K-Medoid AlgorithmsIJAFRCNo ratings yet
- Memory Efficient Kernel Approximation: . This Work Was Done Before Joining GoogleDocument32 pagesMemory Efficient Kernel Approximation: . This Work Was Done Before Joining Googlehatakekakashinrt2033No ratings yet
- Cluster Analysis or Clustering Is The Art of Separating The Data Points Into Dissimilar Group With ADocument11 pagesCluster Analysis or Clustering Is The Art of Separating The Data Points Into Dissimilar Group With AramaabbidiNo ratings yet
- DMDW R20 Unit 5Document21 pagesDMDW R20 Unit 5car sorryNo ratings yet
- A Robust Deterministic Annealing Algorithm For Data ClusteringDocument17 pagesA Robust Deterministic Annealing Algorithm For Data ClusteringRahul SinhaNo ratings yet
- 10 Clus BasicDocument92 pages10 Clus BasicMike KuNo ratings yet
- Pam Clustering TechniqueDocument13 pagesPam Clustering TechniqueAnoyNo ratings yet
- DM BS Lec8 ClusteringDocument48 pagesDM BS Lec8 ClusteringrubaNo ratings yet
- Depso Model For Efficient Clustering Using Drifting Concepts.Document5 pagesDepso Model For Efficient Clustering Using Drifting Concepts.Dr J S KanchanaNo ratings yet
- Dbscan: Fast Density-Based Clustering With R: Michael Hahsler Matthew PiekenbrockDocument28 pagesDbscan: Fast Density-Based Clustering With R: Michael Hahsler Matthew PiekenbrockIrina AlexandraNo ratings yet
- Analysis and Study of Incremental DBSCAN Clustering AlgorithmDocument15 pagesAnalysis and Study of Incremental DBSCAN Clustering Algorithmadmin2146No ratings yet
- An Introduction To Clustering MethodsDocument8 pagesAn Introduction To Clustering MethodsmagargieNo ratings yet
- The Application of K-Medoids and PAM To The Clustering of RulesDocument6 pagesThe Application of K-Medoids and PAM To The Clustering of Rulesmoldova89No ratings yet
- Handling Data Skew in Mapreduce: Benjamin Gufler, Nikolaus Augsten, Angelika Reiser and Alfons KemperDocument10 pagesHandling Data Skew in Mapreduce: Benjamin Gufler, Nikolaus Augsten, Angelika Reiser and Alfons KemperShreyansh DiwanNo ratings yet
- Performance Analysis of Different Cluste PDFDocument5 pagesPerformance Analysis of Different Cluste PDFNaresh MathurNo ratings yet
- Performance Analysis of Different Clustering Algorithm: Naresh Mathur, Manish Tiwari, Sarika KhandelwalDocument5 pagesPerformance Analysis of Different Clustering Algorithm: Naresh Mathur, Manish Tiwari, Sarika KhandelwalNaresh MathurNo ratings yet
- Big Data: An Optimized Approach For Cluster Initialization: Open Access ResearchDocument19 pagesBig Data: An Optimized Approach For Cluster Initialization: Open Access ResearchEdwardNo ratings yet
- IJIKMv15p091 108altaf6036Document18 pagesIJIKMv15p091 108altaf6036Mujahid QaisraniNo ratings yet
- Automatic Clustering Using An Improved Differential Evolution AlgorithmDocument20 pagesAutomatic Clustering Using An Improved Differential Evolution Algorithmavinash223No ratings yet
- Analysis&Comparisonof Efficient TechniquesofDocument5 pagesAnalysis&Comparisonof Efficient TechniquesofasthaNo ratings yet
- Unit4 DatascienceDocument43 pagesUnit4 DatasciencedrsaranyarcwNo ratings yet
- Chang Liang Et Al - Scaling Up Kernel Grower Clustering Method For Large Data Sets Via Core-SetsDocument7 pagesChang Liang Et Al - Scaling Up Kernel Grower Clustering Method For Large Data Sets Via Core-SetsTuhmaNo ratings yet
- Document Clustering in Web Search Engine: International Journal of Computer Trends and Technology-volume3Issue2 - 2012Document4 pagesDocument Clustering in Web Search Engine: International Journal of Computer Trends and Technology-volume3Issue2 - 2012surendiran123No ratings yet
- Data Mining and Machine Learning PDFDocument10 pagesData Mining and Machine Learning PDFBidof VicNo ratings yet
- A Fast K-Means Implementation Using CoresetsDocument10 pagesA Fast K-Means Implementation Using CoresetsHiinoNo ratings yet
- Analysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional DataDocument5 pagesAnalysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional Datasurendiran123No ratings yet
- Clustering For Big Data AnalyticsDocument28 pagesClustering For Big Data AnalyticshakonaNo ratings yet
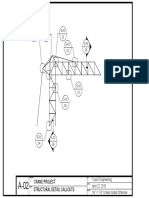
- Structural Detail Callouts Crane Project: Trusst Engineering April 22, 2016 1/8" 1'-0" Unless Noted OthersiseDocument1 pageStructural Detail Callouts Crane Project: Trusst Engineering April 22, 2016 1/8" 1'-0" Unless Noted OthersiseJulioMartinezNo ratings yet
- Crane Project Construction Document Package: Trusst Engineering June 7, 2016 N/A Dylan Jones 24X36"Document8 pagesCrane Project Construction Document Package: Trusst Engineering June 7, 2016 N/A Dylan Jones 24X36"JulioMartinezNo ratings yet
- Lab8 MainDocument3 pagesLab8 MainJulioMartinezNo ratings yet
- MATH 185. Introduction To Computational Statistics (4) : Prerequisites: Math 181B or Consent of InstructorDocument1 pageMATH 185. Introduction To Computational Statistics (4) : Prerequisites: Math 181B or Consent of InstructorJulioMartinezNo ratings yet
- This Is A Random PDFDocument1 pageThis Is A Random PDFJulioMartinezNo ratings yet
- 1 Section: Julio MartinezDocument6 pages1 Section: Julio MartinezJulioMartinezNo ratings yet
- Document 1Document1 pageDocument 1JulioMartinezNo ratings yet
- CFD Analysis of Flow Through Compressor CascadeDocument10 pagesCFD Analysis of Flow Through Compressor CascadeKhalid KhalilNo ratings yet
- ElectrochemistryDocument19 pagesElectrochemistrySatram DasNo ratings yet
- Iglidur W300 - The Marathon RunnerDocument20 pagesIglidur W300 - The Marathon RunnerMarcus ChongNo ratings yet
- Study of Icf Bogie: K.Pavan Kumar Vignan Engg. College HyderabadDocument49 pagesStudy of Icf Bogie: K.Pavan Kumar Vignan Engg. College HyderabadBoby PatelNo ratings yet
- 3CX-T-PC Precision Control (Servo) 9812/0010: ServiceDocument2 pages3CX-T-PC Precision Control (Servo) 9812/0010: ServiceRomanNo ratings yet
- 03 Quality Control Lecture 3 1 PDFDocument26 pages03 Quality Control Lecture 3 1 PDFJoJa JoJaNo ratings yet
- CCK/W33: Spherical Roller BearingsDocument4 pagesCCK/W33: Spherical Roller BearingshamdaNo ratings yet
- External Reciprocating Steam EngineDocument8 pagesExternal Reciprocating Steam EngineabdiNo ratings yet
- Current Mode DCMDocument3 pagesCurrent Mode DCMDipanjan DasNo ratings yet
- Acer Aspire 4535 - La-4921p Kblg0 Nblg0 - Rev 1.0Document57 pagesAcer Aspire 4535 - La-4921p Kblg0 Nblg0 - Rev 1.0Muhamad RidhwanNo ratings yet
- Combined Catalogue - AuXC-2000, ATS, ACCLDocument68 pagesCombined Catalogue - AuXC-2000, ATS, ACCLmangalelectric CorporationNo ratings yet
- (Gray Meyer) Analysis and Design of Analog Integrated Circuits 5th CroppedDocument60 pages(Gray Meyer) Analysis and Design of Analog Integrated Circuits 5th CroppedvishalwinsNo ratings yet
- Master Thesis Photovoltaic Thermal System (PVT) PDFDocument143 pagesMaster Thesis Photovoltaic Thermal System (PVT) PDFYandi Hidayat0% (1)
- 3D Router CarverDocument8 pages3D Router CarverWilder Navarro MattosNo ratings yet
- Railway Reservation SystemDocument7 pagesRailway Reservation Systemsavar23No ratings yet
- TAL 047 5676a - enDocument12 pagesTAL 047 5676a - enM. ShaatNo ratings yet
- COLUMBARIUMDocument18 pagesCOLUMBARIUMKelly SantiagoNo ratings yet
- Otech Analysis of Carsington Dam PDFDocument9 pagesOtech Analysis of Carsington Dam PDF0808276kNo ratings yet
- STI Stopper Station SeriesDocument4 pagesSTI Stopper Station SeriesTELNEX SASNo ratings yet
- FT Hdpe 8920 Dow PDFDocument3 pagesFT Hdpe 8920 Dow PDFEsteban GómezNo ratings yet
- Gaurav PandeyDocument36 pagesGaurav PandeyOYSTERNo ratings yet
- Technical Description Hydraulic Excavator A 934 ' Litronic NEDocument12 pagesTechnical Description Hydraulic Excavator A 934 ' Litronic NELiebherrNo ratings yet
- 5 Minutes To Install Hyperledger Fabric v1Document7 pages5 Minutes To Install Hyperledger Fabric v1bp_sriNo ratings yet
- ACCC Conductor Installation Guidelines 20181Document89 pagesACCC Conductor Installation Guidelines 20181EDGARDO DIAZGRANADOSNo ratings yet
- ME 422 Quiz 1Document3 pagesME 422 Quiz 1Daryl MadejaNo ratings yet
- Foot Rests: Difficult To HoldDocument117 pagesFoot Rests: Difficult To Holdkan seNo ratings yet
- Ecse 353 Electromagnetic Fields and Waves Formulas: V) V + V V V V 0Document6 pagesEcse 353 Electromagnetic Fields and Waves Formulas: V) V + V V V V 0Eileen FuNo ratings yet
- IuPS Over ATM Integration SoPDocument10 pagesIuPS Over ATM Integration SoPkwidyaNo ratings yet