
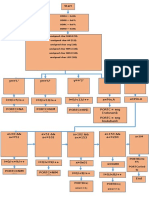
Flow Diagram (First Draft) : Rccommand (Pitch) - 5 Delay 500 Hold - Position Delay 1000 Rccommand (Yaw) 45
Flow Diagram (First Draft) : Rccommand (Pitch) - 5 Delay 500 Hold - Position Delay 1000 Rccommand (Yaw) 45
You might also like
- Lab 4Document17 pagesLab 4Prithvi RastogiNo ratings yet
- Diagrama de Flujo Pregunta 1Document1 pageDiagrama de Flujo Pregunta 1Cristian KevinNo ratings yet
- Pre Vio Practica 2Document3 pagesPre Vio Practica 2Adri Ripli “Adriripli”No ratings yet
- Tarea Computacional 8 JunioDocument2 pagesTarea Computacional 8 JunioBrayan Coyuri LopezNo ratings yet
- Zadaci Sa Vjezbi AMIRADocument43 pagesZadaci Sa Vjezbi AMIRAsandraNo ratings yet
- LCDFUN Normal.hDocument7 pagesLCDFUN Normal.hKumari MugilanNo ratings yet
- All Code MicroDocument12 pagesAll Code Micro20112075No ratings yet
- Codigo Del Selector5555Document2 pagesCodigo Del Selector5555MariaNo ratings yet
- Software Program: Appendix EDocument33 pagesSoftware Program: Appendix Emostafa HusseinNo ratings yet
- Digital Systems - Mini AVR 4: Pere Pal' A - Alexis L OpezDocument16 pagesDigital Systems - Mini AVR 4: Pere Pal' A - Alexis L OpezDaniel Ramón GallardoNo ratings yet
- Arduino Mega & Trinket CodeDocument7 pagesArduino Mega & Trinket Codeapi-362315551No ratings yet
- Code Eeprom MultiwiiDocument11 pagesCode Eeprom MultiwiiBimo Ahmad YuliarNo ratings yet
- Experiment 9 & 10Document6 pagesExperiment 9 & 10venkyjajula55No ratings yet
- Lab 4Document23 pagesLab 4Suyash MishraNo ratings yet
- 2do Parcial Aquitectura1Document3 pages2do Parcial Aquitectura1Mario FuentesNo ratings yet
- Ark Settings Second PartDocument6 pagesArk Settings Second Partjorge.p.go.conejoNo ratings yet
- Digital Vlsi Design Laboratory: Test BenchDocument9 pagesDigital Vlsi Design Laboratory: Test BenchAkshay RochwaniNo ratings yet
- Code FinalDocument22 pagesCode FinalKhánh NguyễnNo ratings yet
- CORRECTIONtp 8Document3 pagesCORRECTIONtp 8houssem 4275No ratings yet
- Input Input Output Output Reg Reg Reg Wire Reg Always Posedge or Posedge Begin If BeginDocument3 pagesInput Input Output Output Reg Reg Reg Wire Reg Always Posedge or Posedge Begin If BeginAjay MauryaNo ratings yet
- Code Your Testbench HereDocument13 pagesCode Your Testbench HeresiruNo ratings yet
- Counter With ResetDocument1 pageCounter With ResetMohanarajan Mohan KumarNo ratings yet
- 4.2 Nota de EstudiantesDocument3 pages4.2 Nota de EstudiantesJhon Kevin Pelaez GuevaraNo ratings yet
- DC Motor Speed Control and Measurement Using Arduino and LCDDocument1 pageDC Motor Speed Control and Measurement Using Arduino and LCDPhostine OmondiNo ratings yet
- IncludeDocument2 pagesIncludeDra GoenNo ratings yet
- bc200206429 ECO401Document3 pagesbc200206429 ECO401Livefor laughNo ratings yet
- Radar - ArduinoDocument1 pageRadar - ArduinoKevin SantiagoNo ratings yet
- M01 - ArduCopter Mission Planner PID UsoDocument1 pageM01 - ArduCopter Mission Planner PID UsovpolooroNo ratings yet
- OS Lab: Experiment 5Document3 pagesOS Lab: Experiment 5PriyanshiNo ratings yet
- Euro V10Document1 pageEuro V10Sebi BandolNo ratings yet
- DB Lab 8Document7 pagesDB Lab 8k190287 Abdul Ghaffar AnsariNo ratings yet
- CN - WT Cse Lab Manual-52-56Document5 pagesCN - WT Cse Lab Manual-52-56Praveen Kumar KandhalaNo ratings yet
- 12 Bit AdderDocument3 pages12 Bit Adder张子健No ratings yet
- 12bitadder PDFDocument3 pages12bitadder PDF张子健No ratings yet
- DDRA 0x00 DDRB 0xFF DDRC 0xFF DDRD 0x00 : PORTB 0x FF PORTC 0x0 0Document1 pageDDRA 0x00 DDRB 0xFF DDRC 0xFF DDRD 0x00 : PORTB 0x FF PORTC 0x0 0Mamluatus LulukNo ratings yet
- Huong DanDocument5 pagesHuong DanNiall PetersonNo ratings yet
- Log-20200415 1358 1Document5 pagesLog-20200415 1358 1Hamza HamzaNo ratings yet
- Round Robin Process SchedulingDocument4 pagesRound Robin Process SchedulingSharanangadiNo ratings yet
- PAC874247 CodechangesDocument6 pagesPAC874247 CodechangesRohan VanceNo ratings yet
- D Flip-Flop: VHDL CodeDocument37 pagesD Flip-Flop: VHDL CodeVenkata Nagasai2000No ratings yet
- MC D (TC) DQ MC D DQ MC 10Document2 pagesMC D (TC) DQ MC D DQ MC 10Noman AliNo ratings yet
- Spring 2021 - ECO401 - 2 - BC200409477Document2 pagesSpring 2021 - ECO401 - 2 - BC200409477Noman AliNo ratings yet
- Perfectly Competitive Market NoteDocument3 pagesPerfectly Competitive Market NoteRita LinNo ratings yet
- AllinonechidoDocument6 pagesAllinonechidoCésar HernándezNo ratings yet
- Practica 1 WordDocument4 pagesPractica 1 WordJdlfj SongNo ratings yet
- 4 Led 7 SegDocument2 pages4 Led 7 SegTuấn Minh NgôNo ratings yet
- Assignment-10: DFF CodeDocument8 pagesAssignment-10: DFF CodeNarendra Babu GunnamNo ratings yet
- OSLAB2Document10 pagesOSLAB2Mujtaba AhmedNo ratings yet
- Codigo Prol+pellerDocument13 pagesCodigo Prol+pellerBoris PQNo ratings yet
- Experiment 12 (I) : Synchronous D-Flip FlopDocument5 pagesExperiment 12 (I) : Synchronous D-Flip FlopSatyam SharmaNo ratings yet
- DC MotorDocument17 pagesDC Motorchappidi anushaNo ratings yet
- Lathe Leadscrew Arduino CodeDocument6 pagesLathe Leadscrew Arduino Codeclaudi94No ratings yet
- Arduino Nano Propeller LEDAnalog Clock 20190403 ADocument4 pagesArduino Nano Propeller LEDAnalog Clock 20190403 AJeng RaffaNo ratings yet
- Bo Dem Thoi GianDocument3 pagesBo Dem Thoi Giancuongchu2506No ratings yet
- Slave-1 #Include Sbit Water - Ind P2 0 Sbit Motor P2 1 Sbit Master P2 2Document6 pagesSlave-1 #Include Sbit Water - Ind P2 0 Sbit Motor P2 1 Sbit Master P2 2Zain UsmaniNo ratings yet
- Project SoC PWMDocument10 pagesProject SoC PWMLê Đình HuyNo ratings yet
- Sev SegDocument1 pageSev SegMuhammad SharjeelNo ratings yet
- Projeto MIC VHDL-1Document4 pagesProjeto MIC VHDL-1Guilherme ManciniNo ratings yet
- CodebomDocument3 pagesCodebomNguyỄn VăN NaMNo ratings yet
- EPE491 Single Phase TransformerDocument17 pagesEPE491 Single Phase TransformerAliMubarakNo ratings yet
- EPE491 Introduction To Power ElectronicsDocument18 pagesEPE491 Introduction To Power ElectronicsAliMubarakNo ratings yet
- EPE491 Single-Phase MotorsDocument11 pagesEPE491 Single-Phase MotorsAliMubarakNo ratings yet
- This Sample Expository Essay From Thoughtful Learning Relies Heavily On Facts and Statistics To Explain The Important Concept of CheatingDocument1 pageThis Sample Expository Essay From Thoughtful Learning Relies Heavily On Facts and Statistics To Explain The Important Concept of CheatingAliMubarakNo ratings yet
- Apple PDFDocument1 pageApple PDFAliMubarakNo ratings yet
- Isible Signs of Planning: 22 First Sentences From Stanford ApplicantsDocument1 pageIsible Signs of Planning: 22 First Sentences From Stanford ApplicantsAliMubarakNo ratings yet
- Fluid AssignmentDocument9 pagesFluid AssignmentAliMubarakNo ratings yet
- Report 2.0 DESIGN MECHY UITMDocument15 pagesReport 2.0 DESIGN MECHY UITMAliMubarakNo ratings yet
- Node 58 - 86Document15 pagesNode 58 - 86AliMubarakNo ratings yet
- Comparison Study of Three Types of Pump:: Reciprocating, Rotary and CentrifugalDocument4 pagesComparison Study of Three Types of Pump:: Reciprocating, Rotary and CentrifugalAliMubarakNo ratings yet
- On It A, On: Project BackgroundDocument2 pagesOn It A, On: Project BackgroundAliMubarakNo ratings yet
- Bachelor of Engineering (Hons) Mechanical Applied Mechanics Lab (Dynamic) MEC424Document12 pagesBachelor of Engineering (Hons) Mechanical Applied Mechanics Lab (Dynamic) MEC424AliMubarakNo ratings yet
- Faculty of Mechanical Engineering Teamwork Assessment FormDocument1 pageFaculty of Mechanical Engineering Teamwork Assessment FormAliMubarakNo ratings yet
- Mem564 Welding Discussion ConclusionDocument2 pagesMem564 Welding Discussion ConclusionAliMubarakNo ratings yet
- Welding Symbols AssignmentDocument2 pagesWelding Symbols AssignmentAliMubarakNo ratings yet
- MEC 424 Physical Pendulum - Wooden PendulumDocument20 pagesMEC 424 Physical Pendulum - Wooden PendulumAliMubarak100% (1)










































































Download as docx, pdf, or txt
You might also like
- Lab 4Document17 pagesLab 4Prithvi RastogiNo ratings yet
- Diagrama de Flujo Pregunta 1Document1 pageDiagrama de Flujo Pregunta 1Cristian KevinNo ratings yet
- Pre Vio Practica 2Document3 pagesPre Vio Practica 2Adri Ripli “Adriripli”No ratings yet
- Tarea Computacional 8 JunioDocument2 pagesTarea Computacional 8 JunioBrayan Coyuri LopezNo ratings yet
- Zadaci Sa Vjezbi AMIRADocument43 pagesZadaci Sa Vjezbi AMIRAsandraNo ratings yet
- LCDFUN Normal.hDocument7 pagesLCDFUN Normal.hKumari MugilanNo ratings yet
- All Code MicroDocument12 pagesAll Code Micro20112075No ratings yet
- Codigo Del Selector5555Document2 pagesCodigo Del Selector5555MariaNo ratings yet
- Software Program: Appendix EDocument33 pagesSoftware Program: Appendix Emostafa HusseinNo ratings yet
- Digital Systems - Mini AVR 4: Pere Pal' A - Alexis L OpezDocument16 pagesDigital Systems - Mini AVR 4: Pere Pal' A - Alexis L OpezDaniel Ramón GallardoNo ratings yet
- Arduino Mega & Trinket CodeDocument7 pagesArduino Mega & Trinket Codeapi-362315551No ratings yet
- Code Eeprom MultiwiiDocument11 pagesCode Eeprom MultiwiiBimo Ahmad YuliarNo ratings yet
- Experiment 9 & 10Document6 pagesExperiment 9 & 10venkyjajula55No ratings yet
- Lab 4Document23 pagesLab 4Suyash MishraNo ratings yet
- 2do Parcial Aquitectura1Document3 pages2do Parcial Aquitectura1Mario FuentesNo ratings yet
- Ark Settings Second PartDocument6 pagesArk Settings Second Partjorge.p.go.conejoNo ratings yet
- Digital Vlsi Design Laboratory: Test BenchDocument9 pagesDigital Vlsi Design Laboratory: Test BenchAkshay RochwaniNo ratings yet
- Code FinalDocument22 pagesCode FinalKhánh NguyễnNo ratings yet
- CORRECTIONtp 8Document3 pagesCORRECTIONtp 8houssem 4275No ratings yet
- Input Input Output Output Reg Reg Reg Wire Reg Always Posedge or Posedge Begin If BeginDocument3 pagesInput Input Output Output Reg Reg Reg Wire Reg Always Posedge or Posedge Begin If BeginAjay MauryaNo ratings yet
- Code Your Testbench HereDocument13 pagesCode Your Testbench HeresiruNo ratings yet
- Counter With ResetDocument1 pageCounter With ResetMohanarajan Mohan KumarNo ratings yet
- 4.2 Nota de EstudiantesDocument3 pages4.2 Nota de EstudiantesJhon Kevin Pelaez GuevaraNo ratings yet
- DC Motor Speed Control and Measurement Using Arduino and LCDDocument1 pageDC Motor Speed Control and Measurement Using Arduino and LCDPhostine OmondiNo ratings yet
- IncludeDocument2 pagesIncludeDra GoenNo ratings yet
- bc200206429 ECO401Document3 pagesbc200206429 ECO401Livefor laughNo ratings yet
- Radar - ArduinoDocument1 pageRadar - ArduinoKevin SantiagoNo ratings yet
- M01 - ArduCopter Mission Planner PID UsoDocument1 pageM01 - ArduCopter Mission Planner PID UsovpolooroNo ratings yet
- OS Lab: Experiment 5Document3 pagesOS Lab: Experiment 5PriyanshiNo ratings yet
- Euro V10Document1 pageEuro V10Sebi BandolNo ratings yet
- DB Lab 8Document7 pagesDB Lab 8k190287 Abdul Ghaffar AnsariNo ratings yet
- CN - WT Cse Lab Manual-52-56Document5 pagesCN - WT Cse Lab Manual-52-56Praveen Kumar KandhalaNo ratings yet
- 12 Bit AdderDocument3 pages12 Bit Adder张子健No ratings yet
- 12bitadder PDFDocument3 pages12bitadder PDF张子健No ratings yet
- DDRA 0x00 DDRB 0xFF DDRC 0xFF DDRD 0x00 : PORTB 0x FF PORTC 0x0 0Document1 pageDDRA 0x00 DDRB 0xFF DDRC 0xFF DDRD 0x00 : PORTB 0x FF PORTC 0x0 0Mamluatus LulukNo ratings yet
- Huong DanDocument5 pagesHuong DanNiall PetersonNo ratings yet
- Log-20200415 1358 1Document5 pagesLog-20200415 1358 1Hamza HamzaNo ratings yet
- Round Robin Process SchedulingDocument4 pagesRound Robin Process SchedulingSharanangadiNo ratings yet
- PAC874247 CodechangesDocument6 pagesPAC874247 CodechangesRohan VanceNo ratings yet
- D Flip-Flop: VHDL CodeDocument37 pagesD Flip-Flop: VHDL CodeVenkata Nagasai2000No ratings yet
- MC D (TC) DQ MC D DQ MC 10Document2 pagesMC D (TC) DQ MC D DQ MC 10Noman AliNo ratings yet
- Spring 2021 - ECO401 - 2 - BC200409477Document2 pagesSpring 2021 - ECO401 - 2 - BC200409477Noman AliNo ratings yet
- Perfectly Competitive Market NoteDocument3 pagesPerfectly Competitive Market NoteRita LinNo ratings yet
- AllinonechidoDocument6 pagesAllinonechidoCésar HernándezNo ratings yet
- Practica 1 WordDocument4 pagesPractica 1 WordJdlfj SongNo ratings yet
- 4 Led 7 SegDocument2 pages4 Led 7 SegTuấn Minh NgôNo ratings yet
- Assignment-10: DFF CodeDocument8 pagesAssignment-10: DFF CodeNarendra Babu GunnamNo ratings yet
- OSLAB2Document10 pagesOSLAB2Mujtaba AhmedNo ratings yet
- Codigo Prol+pellerDocument13 pagesCodigo Prol+pellerBoris PQNo ratings yet
- Experiment 12 (I) : Synchronous D-Flip FlopDocument5 pagesExperiment 12 (I) : Synchronous D-Flip FlopSatyam SharmaNo ratings yet
- DC MotorDocument17 pagesDC Motorchappidi anushaNo ratings yet
- Lathe Leadscrew Arduino CodeDocument6 pagesLathe Leadscrew Arduino Codeclaudi94No ratings yet
- Arduino Nano Propeller LEDAnalog Clock 20190403 ADocument4 pagesArduino Nano Propeller LEDAnalog Clock 20190403 AJeng RaffaNo ratings yet
- Bo Dem Thoi GianDocument3 pagesBo Dem Thoi Giancuongchu2506No ratings yet
- Slave-1 #Include Sbit Water - Ind P2 0 Sbit Motor P2 1 Sbit Master P2 2Document6 pagesSlave-1 #Include Sbit Water - Ind P2 0 Sbit Motor P2 1 Sbit Master P2 2Zain UsmaniNo ratings yet
- Project SoC PWMDocument10 pagesProject SoC PWMLê Đình HuyNo ratings yet
- Sev SegDocument1 pageSev SegMuhammad SharjeelNo ratings yet
- Projeto MIC VHDL-1Document4 pagesProjeto MIC VHDL-1Guilherme ManciniNo ratings yet
- CodebomDocument3 pagesCodebomNguyỄn VăN NaMNo ratings yet
- EPE491 Single Phase TransformerDocument17 pagesEPE491 Single Phase TransformerAliMubarakNo ratings yet
- EPE491 Introduction To Power ElectronicsDocument18 pagesEPE491 Introduction To Power ElectronicsAliMubarakNo ratings yet
- EPE491 Single-Phase MotorsDocument11 pagesEPE491 Single-Phase MotorsAliMubarakNo ratings yet
- This Sample Expository Essay From Thoughtful Learning Relies Heavily On Facts and Statistics To Explain The Important Concept of CheatingDocument1 pageThis Sample Expository Essay From Thoughtful Learning Relies Heavily On Facts and Statistics To Explain The Important Concept of CheatingAliMubarakNo ratings yet
- Apple PDFDocument1 pageApple PDFAliMubarakNo ratings yet
- Isible Signs of Planning: 22 First Sentences From Stanford ApplicantsDocument1 pageIsible Signs of Planning: 22 First Sentences From Stanford ApplicantsAliMubarakNo ratings yet
- Fluid AssignmentDocument9 pagesFluid AssignmentAliMubarakNo ratings yet
- Report 2.0 DESIGN MECHY UITMDocument15 pagesReport 2.0 DESIGN MECHY UITMAliMubarakNo ratings yet
- Node 58 - 86Document15 pagesNode 58 - 86AliMubarakNo ratings yet
- Comparison Study of Three Types of Pump:: Reciprocating, Rotary and CentrifugalDocument4 pagesComparison Study of Three Types of Pump:: Reciprocating, Rotary and CentrifugalAliMubarakNo ratings yet
- On It A, On: Project BackgroundDocument2 pagesOn It A, On: Project BackgroundAliMubarakNo ratings yet
- Bachelor of Engineering (Hons) Mechanical Applied Mechanics Lab (Dynamic) MEC424Document12 pagesBachelor of Engineering (Hons) Mechanical Applied Mechanics Lab (Dynamic) MEC424AliMubarakNo ratings yet
- Faculty of Mechanical Engineering Teamwork Assessment FormDocument1 pageFaculty of Mechanical Engineering Teamwork Assessment FormAliMubarakNo ratings yet
- Mem564 Welding Discussion ConclusionDocument2 pagesMem564 Welding Discussion ConclusionAliMubarakNo ratings yet
- Welding Symbols AssignmentDocument2 pagesWelding Symbols AssignmentAliMubarakNo ratings yet
- MEC 424 Physical Pendulum - Wooden PendulumDocument20 pagesMEC 424 Physical Pendulum - Wooden PendulumAliMubarak100% (1)