Download as pdf or txt
You might also like
- Modave2005 PDFDocument298 pagesModave2005 PDFpolickNo ratings yet
- Spencer D. Interplanetary Astrodynamics 2023Document403 pagesSpencer D. Interplanetary Astrodynamics 2023cds100% (3)
- 02-07-22 - Sr.S60, ELITE, TARGET & LIIT - EAMCET - GTE-07 - Q.PAPERDocument22 pages02-07-22 - Sr.S60, ELITE, TARGET & LIIT - EAMCET - GTE-07 - Q.PAPERPrabhakar BandaruNo ratings yet
- Algebraic Topology I and II, Haynes Miller MIT 2021Document307 pagesAlgebraic Topology I and II, Haynes Miller MIT 2021José FilhoNo ratings yet
- Chemsep ManualDocument179 pagesChemsep Manualiqcesar1651No ratings yet
- Computer Graphics SolutionsDocument34 pagesComputer Graphics SolutionsRenu Bharat KewalramaniNo ratings yet
- 8 1 The Slope of A LineDocument16 pages8 1 The Slope of A Lineapi-233527181100% (2)
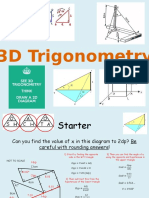
- 18) 3D TrigonometryDocument11 pages18) 3D TrigonometryKeri-ann Millar100% (1)
- Laboratory Manual For MineralogyDocument27 pagesLaboratory Manual For MineralogyJesús Guillermo Camarena VázquezNo ratings yet
- CurvesFoliationsBook PDFDocument82 pagesCurvesFoliationsBook PDFAnonymous MNQ6iZNo ratings yet
- Hartmann F. The Mathematical Foundation of Structural Mechanics. 1985. 371pDocument382 pagesHartmann F. The Mathematical Foundation of Structural Mechanics. 1985. 371pqazsNo ratings yet
- Preface ........................................................................................................Document13 pagesPreface ........................................................................................................lotannaNo ratings yet
- İkili Sistemleri Kapatma SistemiDocument44 pagesİkili Sistemleri Kapatma SistemiMustafa Uslan100% (1)
- Berger GR 2006Document97 pagesBerger GR 2006Thongkool CtpNo ratings yet
- C348 Mathematics For General Relativity Chapters 1 and 2 (UCL)Document37 pagesC348 Mathematics For General Relativity Chapters 1 and 2 (UCL)ucaptd3No ratings yet
- Complex GeometryDocument146 pagesComplex Geometryvictor_br12No ratings yet
- Lecture Notes On Particle Physics PH3520 - 2012/2013: Glen D. Cowan Updated by V. Boisvert Physics DepartmentDocument22 pagesLecture Notes On Particle Physics PH3520 - 2012/2013: Glen D. Cowan Updated by V. Boisvert Physics DepartmentNivedha RadhakrishnanNo ratings yet
- Calibrated Brane Solutions of M TheoryDocument153 pagesCalibrated Brane Solutions of M TheoryVernonNo ratings yet
- Introduction To String Theory, by Timo WeigandDocument177 pagesIntroduction To String Theory, by Timo WeigandMatt Van'HeusenNo ratings yet
- Spherical Solutions - Field Eq Einstein - and - Brans-Dicke GravityDocument106 pagesSpherical Solutions - Field Eq Einstein - and - Brans-Dicke GravityAdriana Marina CardiniNo ratings yet
- PDF Introductory Solid State Physics With Matlab Applications 1St Edition Javier E Hasbun Author Ebook Full ChapterDocument53 pagesPDF Introductory Solid State Physics With Matlab Applications 1St Edition Javier E Hasbun Author Ebook Full Chapterwilliam.brown182100% (6)
- Ergodic NotesDocument115 pagesErgodic NotesoveiskntuNo ratings yet
- (Progress in Mathematical Physics 59) Gerardo F. Torres Del Castillo (Auth.) - Spinors in Four-Dimensional Spaces-Birkhà User Basel (2010)Document182 pages(Progress in Mathematical Physics 59) Gerardo F. Torres Del Castillo (Auth.) - Spinors in Four-Dimensional Spaces-Birkhà User Basel (2010)Samantha Loredo RamirezNo ratings yet
- FULLTEXT01Document122 pagesFULLTEXT01Ns sNo ratings yet
- CK-12 Chemistry Intermediate Workbook Answer Key (05.04.16)Document384 pagesCK-12 Chemistry Intermediate Workbook Answer Key (05.04.16)Lakeydra McGuire-S100% (2)
- Gauge Invariance and Weyl-Polymer QuantizationDocument104 pagesGauge Invariance and Weyl-Polymer Quantization李偉志100% (1)
- TASI Lectures On Complex StructuresDocument109 pagesTASI Lectures On Complex StructuresRoman BerensNo ratings yet
- Fabrizio M A Course in Quantum Manybody TheoryDocument350 pagesFabrizio M A Course in Quantum Manybody TheoryStrahinja Donic100% (1)
- Introduction To Topology 1693065415Document118 pagesIntroduction To Topology 1693065415alaaNo ratings yet
- Textbook Ebook Ideas of Quantum Chemistry Volume 1 From Quantum Physics To Chemistry 3Rd Edition Lucjan Piela All Chapter PDFDocument43 pagesTextbook Ebook Ideas of Quantum Chemistry Volume 1 From Quantum Physics To Chemistry 3Rd Edition Lucjan Piela All Chapter PDFedward.hurley549100% (6)
- Classical and Quantum Cosmology: Gianluca CalcagniDocument854 pagesClassical and Quantum Cosmology: Gianluca CalcagniOleksii SokoliukNo ratings yet
- Dispersion RelationsDocument114 pagesDispersion RelationsklayxzNo ratings yet
- Ebook Geometry Symmetries and Classical Physics A Mosaic 1St Edition Manousos Markoutsakis Online PDF All ChapterDocument69 pagesEbook Geometry Symmetries and Classical Physics A Mosaic 1St Edition Manousos Markoutsakis Online PDF All Chapterbenny.coursey390100% (5)
- Full Download Book Ideas of Quantum Chemistry Volume 1 From Quantum Physics To Chemistry PDFDocument41 pagesFull Download Book Ideas of Quantum Chemistry Volume 1 From Quantum Physics To Chemistry PDFtommy.peacock526100% (27)
- C6HDocument83 pagesC6HOmar DoskyNo ratings yet
- Integral Equations M RahmanDocument385 pagesIntegral Equations M RahmanJosé JaramilloNo ratings yet
- Cambridge Quantum MechanicsDocument45 pagesCambridge Quantum Mechanicsnatufian23100% (1)
- Textbook Gauge Invariance and Weyl Polymer Quantization 1St Edition Franco Strocchi Auth Ebook All Chapter PDFDocument37 pagesTextbook Gauge Invariance and Weyl Polymer Quantization 1St Edition Franco Strocchi Auth Ebook All Chapter PDFmary.hall829100% (14)
- Lectures PDFDocument137 pagesLectures PDFFrancis Clinton Prashanth100% (1)
- LORENTZIAN GEOMETRY AND SPACETIMEDocument124 pagesLORENTZIAN GEOMETRY AND SPACETIMEAngelo OppioNo ratings yet
- Tensile Strength-ThesisDocument125 pagesTensile Strength-Thesissarveshfdk48100% (1)
- Physics of Light and Optics, J. Peatross, M. Ware, ByU (2010)Document339 pagesPhysics of Light and Optics, J. Peatross, M. Ware, ByU (2010)Liz CloosNo ratings yet
- Jeffrey Thomas Conley Boerner - Khovanov Homology in Thickened SurfacesDocument107 pagesJeffrey Thomas Conley Boerner - Khovanov Homology in Thickened SurfacesDuncan_VimNo ratings yet
- 1Document10 pages1Vafa KhalighiNo ratings yet
- Electromagnetism and Relativity - Brian PendeltonDocument107 pagesElectromagnetism and Relativity - Brian PendeltonMartin Vidmar (Navadimo vas)No ratings yet
- Electrodynamics PDFDocument339 pagesElectrodynamics PDFanil ariNo ratings yet
- Knots in Plasma - Christopher Berg SmietDocument142 pagesKnots in Plasma - Christopher Berg SmietRobertNo ratings yet
- Integral Equations and Their ApplicationsDocument385 pagesIntegral Equations and Their Applicationsjmlanwar100% (9)
- Subatomic Lecture Notes OxfordDocument172 pagesSubatomic Lecture Notes OxfordDiego M GranziolNo ratings yet
- Crystalstructure Short Summary Part1 PDF 10797Document46 pagesCrystalstructure Short Summary Part1 PDF 10797xanadu wannaduNo ratings yet
- Física de La Luz y ÓpticaDocument346 pagesFísica de La Luz y ÓpticaFernandoMeade100% (1)
- BookDocument160 pagesBookDr. Pratap Kumar SwainNo ratings yet
- BYUOpticsBook 2015Document346 pagesBYUOpticsBook 2015Haoqing YuNo ratings yet
- Homological AlgebraDocument253 pagesHomological AlgebraMichelangeloNo ratings yet
- (Advances in Mathematical Fluid Mechanics) Björn Gustafsson, Razvan Teodorescu, Alexander Vasil'Ev (Auth.) - Classical and Stochastic Laplacian Growth-Birkhäuser Basel (2014)Document329 pages(Advances in Mathematical Fluid Mechanics) Björn Gustafsson, Razvan Teodorescu, Alexander Vasil'Ev (Auth.) - Classical and Stochastic Laplacian Growth-Birkhäuser Basel (2014)Rafael Garcia100% (1)
- Chemical BondingDocument77 pagesChemical BondingKim ChiNo ratings yet
- Elliptic Partial Differential Equations and Quasiconformal Mappings in the Plane (PMS-48)From EverandElliptic Partial Differential Equations and Quasiconformal Mappings in the Plane (PMS-48)No ratings yet
- Quasi-Monte Carlo Methods in Finance: With Application to Optimal Asset AllocationFrom EverandQuasi-Monte Carlo Methods in Finance: With Application to Optimal Asset AllocationNo ratings yet
- Physical Principles of Medical UltrasonicsFrom EverandPhysical Principles of Medical UltrasonicsC. R. HillNo ratings yet
- Ansi Astm and API Designations For PipingDocument1 pageAnsi Astm and API Designations For PipingKeso RealNo ratings yet
- PMI Test ReportDocument1 pagePMI Test ReportMehdiNo ratings yet
- IPP-01 Intro - Policies and Technical DataDocument7 pagesIPP-01 Intro - Policies and Technical DataMehdiNo ratings yet
- Proficiency Test: Charpy Impact Test (CIT 2004)Document39 pagesProficiency Test: Charpy Impact Test (CIT 2004)MehdiNo ratings yet
- Electro-Cleaning Technical Brief: Contact: David BenchoamDocument8 pagesElectro-Cleaning Technical Brief: Contact: David BenchoamMehdiNo ratings yet
- Impact Test Procedures: Testing Application Standard (Tas) 201-94Document6 pagesImpact Test Procedures: Testing Application Standard (Tas) 201-94MehdiNo ratings yet
- Bradsford Clean PreserveDocument8 pagesBradsford Clean PreserveenricoNo ratings yet
- BJV P16 ManualDocument2 pagesBJV P16 ManualMehdiNo ratings yet
- Juan Martin - Guitarra Flamenca - Solos Flamencos - 42 Solos - Nivel 3Document25 pagesJuan Martin - Guitarra Flamenca - Solos Flamencos - 42 Solos - Nivel 3Dima Lababidi100% (3)
- Fatigue Assessment IJETT-V13P205Document4 pagesFatigue Assessment IJETT-V13P205MehdiNo ratings yet
- Readme - LUTs Color Grading Pack by IWLTBAP (Free) PDFDocument6 pagesReadme - LUTs Color Grading Pack by IWLTBAP (Free) PDFMehdiNo ratings yet
- Workwear Size Chart: (Overalls Normally Worn One Sizes Larger, Being A One Piece Garment, Shorts - Measure by Waist)Document1 pageWorkwear Size Chart: (Overalls Normally Worn One Sizes Larger, Being A One Piece Garment, Shorts - Measure by Waist)MehdiNo ratings yet
- Presentation Grading Optimization in Civil 3D 2022 Residential DevelopmentDocument16 pagesPresentation Grading Optimization in Civil 3D 2022 Residential DevelopmentBolanle OlaawoNo ratings yet
- ProE Sham TickooDocument519 pagesProE Sham TickooSridhar RaoNo ratings yet
- 9th Physics Assignment-I (1) - CompressedDocument2 pages9th Physics Assignment-I (1) - CompressedJATIN YADAVNo ratings yet
- Lesson #15 Centroid of Plane Areas and of Solids of Revolution-1Document20 pagesLesson #15 Centroid of Plane Areas and of Solids of Revolution-1yveeshNo ratings yet
- Essential Calculus Early Transcendentals 2Nd by James Stewart Full ChapterDocument41 pagesEssential Calculus Early Transcendentals 2Nd by James Stewart Full Chapterbrett.armbruster130100% (27)
- Geometry Theorems and Proofs SummaryDocument27 pagesGeometry Theorems and Proofs SummaryAnna Chen100% (1)
- Structural Mechanics of Buried Pipes: Anderson, Loren Runar Et Al "RING DEFORMATION" Boca Raton: CRC Press LLC, 2000Document9 pagesStructural Mechanics of Buried Pipes: Anderson, Loren Runar Et Al "RING DEFORMATION" Boca Raton: CRC Press LLC, 2000Sheikh Mizanur RahmanNo ratings yet
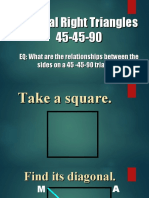
- Special Right Triangles 45-45-90Document55 pagesSpecial Right Triangles 45-45-90Janna BataoNo ratings yet
- Slidex - Tips - Layouts and Lettering PDFDocument35 pagesSlidex - Tips - Layouts and Lettering PDFelle liNo ratings yet
- Maths Lab EquipmentsDocument2 pagesMaths Lab EquipmentsPallav Thakur50% (2)
- Osgood W. Mechanics 1947 PDFDocument522 pagesOsgood W. Mechanics 1947 PDFAnonymous 8Y21cRBNo ratings yet
- Precal SourceDocument57 pagesPrecal SourceMark John Paul Cabling100% (3)
- Lesson 2.5 - Segments, Angles and ArcsDocument5 pagesLesson 2.5 - Segments, Angles and ArcsMuhammad Asif ZamanNo ratings yet
- Revised Syllabus PG2019-20 PDFDocument10 pagesRevised Syllabus PG2019-20 PDFManoj BishtNo ratings yet
- 2020 November Exam Paper Gr5 MathsDocument8 pages2020 November Exam Paper Gr5 MathsUltronic ProgrammerNo ratings yet
- Gcse Exam Questions On Area and PerimeterDocument10 pagesGcse Exam Questions On Area and PerimeterLubnaLatifNo ratings yet
- Winitzki - Solutions To Mukhanov's Course of General Relativity 2006 With Problem SettingsDocument48 pagesWinitzki - Solutions To Mukhanov's Course of General Relativity 2006 With Problem SettingswinitzkiNo ratings yet
- Let S Practice 14-The Graph of An Ellipse With Vertex at The Origin 0 0 1Document3 pagesLet S Practice 14-The Graph of An Ellipse With Vertex at The Origin 0 0 1Carmilleah FreyjahNo ratings yet
- Algebra 2 1.3, 1.4 Practice BDocument2 pagesAlgebra 2 1.3, 1.4 Practice BetelNo ratings yet
- Notes Group Theory in PhysicsDocument159 pagesNotes Group Theory in PhysicsAngelo OppioNo ratings yet
- Application of Derivatives Grade 12 Mathematics 10.2 Solutions KhullakitabDocument1 pageApplication of Derivatives Grade 12 Mathematics 10.2 Solutions Khullakitabsujanpanta1234No ratings yet
- CIE08 Straight LinesDocument17 pagesCIE08 Straight Linesbiologyexpert158No ratings yet
- How To Draw by Scott Robertson PDFDocument208 pagesHow To Draw by Scott Robertson PDFFantNo ratings yet
- Unit 3Document15 pagesUnit 3api-220078930No ratings yet