Download as pdf or txt
You might also like
- Feedback Control System: Introduction To Control SystemDocument45 pagesFeedback Control System: Introduction To Control SystemNoor Nadiah Mohd AzaliNo ratings yet
- Thermodynamic Systems and ProcessesDocument18 pagesThermodynamic Systems and ProcessesAlpesh PanchalNo ratings yet
- FeedCon (Unit 1) PDFDocument17 pagesFeedCon (Unit 1) PDFAbby MacallaNo ratings yet
- Metacentric HeightDocument5 pagesMetacentric HeightRavi Agarwal79% (14)
- Alp ChecklistDocument8 pagesAlp ChecklistBasuki RahardjoNo ratings yet
- FVDAM FlowchartDocument1 pageFVDAM FlowchartDarko IvancevicNo ratings yet
- Ec3351 Control SystemsDocument18 pagesEc3351 Control SystemsParanthaman GNo ratings yet
- (G) - LEC Feedback and OscillatorsDocument43 pages(G) - LEC Feedback and OscillatorsAngelino Pimentel100% (1)
- FeedCon (Unit 1)Document10 pagesFeedCon (Unit 1)Melissa LindayagNo ratings yet
- Transfer Functions and Block Diagrams PDFDocument21 pagesTransfer Functions and Block Diagrams PDFJuliana NepembeNo ratings yet
- How To Calculate Maximum Sampling Rate of An Analog MuxDocument4 pagesHow To Calculate Maximum Sampling Rate of An Analog MuxmaysquaredNo ratings yet
- Control Systems Laboratory Experiment 4 Open-Loop vs. Closed-Loop Control SystemsDocument6 pagesControl Systems Laboratory Experiment 4 Open-Loop vs. Closed-Loop Control SystemsAli MoustafaNo ratings yet
- DSP Sample Question - FinalDocument7 pagesDSP Sample Question - FinalMehta SparshNo ratings yet
- Control Systems Quick GuideDocument90 pagesControl Systems Quick Guidec00lNo ratings yet
- Case StudyDocument9 pagesCase Studyஏம்மனுஎல்லெ செலேச்டினோNo ratings yet
- Feedback and Control Systems: Activity No. 4 - Root Locus Analysis of SystemsDocument8 pagesFeedback and Control Systems: Activity No. 4 - Root Locus Analysis of SystemsYvesExequielPascua100% (1)
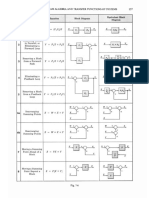
- CHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsDocument6 pagesCHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsIan UdhiliNo ratings yet
- Mechatronics Key Elements Information System: Modeling and SimulationDocument2 pagesMechatronics Key Elements Information System: Modeling and Simulation9740177035No ratings yet
- Mechatronics - Unit 5 - NotesDocument13 pagesMechatronics - Unit 5 - NotesDulce DeNo ratings yet
- Instructional Materials For Advanced Engineering Mathematics For ECEDocument48 pagesInstructional Materials For Advanced Engineering Mathematics For ECEEm ReyesNo ratings yet
- DC Circuits: Prepared byDocument12 pagesDC Circuits: Prepared byRuth DVNo ratings yet
- Digital Control (BER4113)Document18 pagesDigital Control (BER4113)cipet imphal100% (1)
- Wireless Module - Microwave PropagationDocument58 pagesWireless Module - Microwave PropagationA-Jay N. GalizaNo ratings yet
- To Convert Continuous Time Signal To Discrete Time Signal Using SamplingDocument3 pagesTo Convert Continuous Time Signal To Discrete Time Signal Using SamplingNiriNo ratings yet
- Signal SummaryDocument11 pagesSignal Summaryaryaman58No ratings yet
- © Gasmet Technologies 02 January 2006 Introduction To FTIRDocument9 pages© Gasmet Technologies 02 January 2006 Introduction To FTIRAsham HusainNo ratings yet
- Assignment With AnswersDocument19 pagesAssignment With AnswersMythily VedhagiriNo ratings yet
- Transducer and SensorDocument92 pagesTransducer and SensorFemi PrinceNo ratings yet
- DC Motor EarlierDocument229 pagesDC Motor Earlieranoopingle9No ratings yet
- Analog InstrumentsDocument148 pagesAnalog InstrumentsPramod PathadeNo ratings yet
- 2D PhotoelasticityDocument50 pages2D PhotoelasticitySunder Veera KarthikeyanNo ratings yet
- Module Physics For EngineersDocument43 pagesModule Physics For EngineersASTRERO John Denver F.No ratings yet
- Analog Vs Digital TransmissionDocument2 pagesAnalog Vs Digital TransmissionFaizan AhmadNo ratings yet
- Bonga University: Engineering Material (Meng2091)Document19 pagesBonga University: Engineering Material (Meng2091)Mul'isaa JireenyaaNo ratings yet
- Types of ControllersDocument13 pagesTypes of Controllerscssp115No ratings yet
- Introduction To PneumaticsDocument14 pagesIntroduction To PneumaticscayericaNo ratings yet
- Unit 1 Control SystemDocument86 pagesUnit 1 Control SystemVijay Ct67% (3)
- UNIT 2 MechatronicsDocument35 pagesUNIT 2 MechatronicsMuthuvel M91% (11)
- ElectromagneticsDocument10 pagesElectromagneticsLencie Dela CruzNo ratings yet
- Data AcquisitionDocument18 pagesData Acquisitionwanted_JMTINo ratings yet
- Signal Spectra, Signal ProcessingDocument16 pagesSignal Spectra, Signal ProcessingJc Bernabe Daza100% (1)
- Numerical Analysis Course Outline 2020Document2 pagesNumerical Analysis Course Outline 2020Muhammad Ahmad RazaNo ratings yet
- Engineering ElectromagneticsDocument19 pagesEngineering Electromagneticsأحمد دعبسNo ratings yet
- ME8501 - Metrology and Measurements - Unit - IDocument30 pagesME8501 - Metrology and Measurements - Unit - Iarunpdc100% (1)
- Chapter 1 Error Mesurement PDFDocument99 pagesChapter 1 Error Mesurement PDFanesseNo ratings yet
- Comparison of AC and DC TransmissionDocument2 pagesComparison of AC and DC Transmissionlucky250No ratings yet
- Introduction To Control SystemDocument47 pagesIntroduction To Control SystemDlan Dela CruzNo ratings yet
- Fluid Mechanics and Machinery NotesDocument137 pagesFluid Mechanics and Machinery NotesapsrtsNo ratings yet
- Control Systems K-NotesDocument33 pagesControl Systems K-NotesvidhikhabyaNo ratings yet
- Introduction To Measurements: Department of Electronics and Communication EngineeringDocument17 pagesIntroduction To Measurements: Department of Electronics and Communication EngineeringKavitha A KNo ratings yet
- Introduction To Measurement SystemsDocument21 pagesIntroduction To Measurement SystemsAkash JamesNo ratings yet
- JK Flip FlopDocument11 pagesJK Flip FlopprakashpacetNo ratings yet
- 4 Circuit TheoremsDocument40 pages4 Circuit TheoremsTanmoy PandeyNo ratings yet
- Chapter-7 Time Response Analysis of Control SystemDocument23 pagesChapter-7 Time Response Analysis of Control SystemSuprio Ahmed50% (2)
- Resistor Measurement Using Color CodingDocument4 pagesResistor Measurement Using Color CodingAlain JimeneaNo ratings yet
- Engineering Drawing Lecture Note PDFDocument212 pagesEngineering Drawing Lecture Note PDFrangavaliNo ratings yet
- Convolution and Correlation of Signals For PDFDocument21 pagesConvolution and Correlation of Signals For PDFKodanda Venkatesh100% (1)
- By: Mr. Augosto M. DirectoDocument34 pagesBy: Mr. Augosto M. DirectoJames RojasNo ratings yet
- Unit I NotesDocument43 pagesUnit I Notesaravinth69601No ratings yet
- Unit No - II: Block Diagram RepresentationDocument56 pagesUnit No - II: Block Diagram RepresentationNamrta DeokateNo ratings yet
- Assignment Control 615.Document12 pagesAssignment Control 615.Hamza zulfiqarNo ratings yet
- Control System Analysis New CHP 1 and 2Document109 pagesControl System Analysis New CHP 1 and 2KejeindrranNo ratings yet
- Power Optimization For Low Power VLSI CircuitsDocument4 pagesPower Optimization For Low Power VLSI CircuitsCHARANNo ratings yet
- Dsto TN 0462Document23 pagesDsto TN 0462niky186No ratings yet
- Line Stop Welded To Shoe CalculationDocument16 pagesLine Stop Welded To Shoe CalculationmohdnazirNo ratings yet
- Torque Calculation of Hysteresis Motor Using Fem With - 2Document26 pagesTorque Calculation of Hysteresis Motor Using Fem With - 2Saurabh KumarNo ratings yet
- Gas Chromatography-Mass Spectrometry (GC-MS) Analysis of Extracted Oil From Whole Garden Cress (Rashaad) SeedsDocument7 pagesGas Chromatography-Mass Spectrometry (GC-MS) Analysis of Extracted Oil From Whole Garden Cress (Rashaad) SeedsAli Mohammad Abu-RummanNo ratings yet
- Torio, John Carl T. Science 10 q2 Week 6Document12 pagesTorio, John Carl T. Science 10 q2 Week 6carl twqeNo ratings yet
- Arm Aged Don 2419 ADDocument57 pagesArm Aged Don 2419 ADNate LongNo ratings yet
- GS Ep Ele 081 enDocument16 pagesGS Ep Ele 081 entunwahbNo ratings yet
- PLS Pole Tutorial Part 2Document9 pagesPLS Pole Tutorial Part 2JCuchapin100% (2)
- Thermometer AssignmentDocument3 pagesThermometer AssignmentJay Kim100% (1)
- History of The Periodic TableDocument11 pagesHistory of The Periodic TableChristelle SebastianNo ratings yet
- Malaria EnglishDocument14 pagesMalaria EnglishMasrizal Dt.Mangguang100% (1)
- VIV Tandem Diamond IJMS 2023Document49 pagesVIV Tandem Diamond IJMS 2023Intesaaf AshrafNo ratings yet
- Vibro Chrom 400Document2 pagesVibro Chrom 400nabila OktavianiNo ratings yet
- NozzlePRO PDFDocument185 pagesNozzlePRO PDFRagupathy KulandaisamyNo ratings yet
- Shaojun Zhou - Gas Technology InstituteDocument29 pagesShaojun Zhou - Gas Technology InstituteShitalbioNo ratings yet
- 41b Speed Distance Time - H - Mark SchemeDocument13 pages41b Speed Distance Time - H - Mark Schemeyanm1No ratings yet
- Depth PerceptionDocument39 pagesDepth Perceptionsandy_jaat100% (1)
- OpenFrameworks Lections: 1. Interactive Multimedia Systems.Document42 pagesOpenFrameworks Lections: 1. Interactive Multimedia Systems.Денис ПереваловNo ratings yet
- 0 TN 503 RS MeasurementDocument15 pages0 TN 503 RS MeasurementAli JavedNo ratings yet
- Fully Submerged Canard Hydrofoil System For A Low Speed Solar Boat Neola Putnam Gregory Dickert Caleb WagnerDocument20 pagesFully Submerged Canard Hydrofoil System For A Low Speed Solar Boat Neola Putnam Gregory Dickert Caleb WagnerSaga Biju Lona na22b006No ratings yet
- Reviewer in CircuitsDocument56 pagesReviewer in CircuitsMariz-Elaine Noceja RodriguezNo ratings yet
- IMC41Document419 pagesIMC41qasnarNo ratings yet
- Manual Design Validation CalculationDocument21 pagesManual Design Validation CalculationToniNo ratings yet
- 1 s2.0 S0038080621001475 MainDocument15 pages1 s2.0 S0038080621001475 Mainioa sisNo ratings yet
- Physics BooksDocument4 pagesPhysics BooksShams ShamsNo ratings yet
- Tesis de Pared de BloquesDocument230 pagesTesis de Pared de BloquesRobert FinqNo ratings yet