Download as pdf or txt
You might also like
- Mixed-Signal ASIC Design For Digital RF Memory Applications: Michael J. Groden James R. MannDocument5 pagesMixed-Signal ASIC Design For Digital RF Memory Applications: Michael J. Groden James R. MannmdalkilicNo ratings yet
- Header Detection of 5G Mobile Base Station For Wireless Disaster Recovery NetworksDocument3 pagesHeader Detection of 5G Mobile Base Station For Wireless Disaster Recovery NetworksDaniel Junianto SipahutarNo ratings yet
- Publications SmartAntennasDocument8 pagesPublications SmartAntennasCatherine PetersNo ratings yet
- ECE Matlab DSP Proj. Titles Abstracts)Document5 pagesECE Matlab DSP Proj. Titles Abstracts)ACTS TECHNO SOLUTIONSNo ratings yet
- Potentiality of Data Fusion in Analog Circuit Fault DiagnosisDocument6 pagesPotentiality of Data Fusion in Analog Circuit Fault Diagnosisকস্তুরী ঘোষNo ratings yet
- Scanning-Based - Chromatic - Dispersion - Estimation - in - Mode-Multiplexed - Optical - Systems(PAPR GCT和基于延时采样)Document4 pagesScanning-Based - Chromatic - Dispersion - Estimation - in - Mode-Multiplexed - Optical - Systems(PAPR GCT和基于延时采样)wangguan402No ratings yet
- Blind Deconvolution of DS-CDMA Signals by Means of Decomposition in Rank - (1 L L) TermsDocument10 pagesBlind Deconvolution of DS-CDMA Signals by Means of Decomposition in Rank - (1 L L) Termsfeku fekuNo ratings yet
- Daubchies Filter PDFDocument10 pagesDaubchies Filter PDFThrisul KumarNo ratings yet
- Null Broadened-Deepened Array Antenna Beamforming For GNSS Jamming Mitigation in Moving PlatformsDocument5 pagesNull Broadened-Deepened Array Antenna Beamforming For GNSS Jamming Mitigation in Moving PlatformsMohamad Farzan SabahiNo ratings yet
- Pathan-Memon2020 Article AnalyzingTheImpactOfSigma-DeltDocument11 pagesPathan-Memon2020 Article AnalyzingTheImpactOfSigma-DeltShiv Ram MeenaNo ratings yet
- Procogue: KillenDocument8 pagesProcogue: KillenhamsaxyzNo ratings yet
- Digital Coherent Optical Receivers Algorithms and SubsystemsDocument16 pagesDigital Coherent Optical Receivers Algorithms and SubsystemsHebaNo ratings yet
- Duo BinaryDocument8 pagesDuo BinaryFarhan FarhanNo ratings yet
- Bit Error Rate Performance Analysis of CDMA Rake Receiver: Vaibhav Khairanr, Jitendra Mathur, Hema SinghDocument7 pagesBit Error Rate Performance Analysis of CDMA Rake Receiver: Vaibhav Khairanr, Jitendra Mathur, Hema SinghinventionjournalsNo ratings yet
- Fast Multi Channel AnalyzerDocument7 pagesFast Multi Channel AnalyzerDiana AndreiNo ratings yet
- Morales Perez2018Document11 pagesMorales Perez2018Mal TitiNo ratings yet
- A Software Radio Architecture For Smart AntennasDocument8 pagesA Software Radio Architecture For Smart AntennasRockstar_rohithNo ratings yet
- NIThDocument5 pagesNITh21bec091AnandMohanAryaNo ratings yet
- Serial PN Acquisition Using Smart Antenna and Censored Mean Level CFAR Adaptive Thresholding For A DS/CDMA Mobile CommunicationDocument6 pagesSerial PN Acquisition Using Smart Antenna and Censored Mean Level CFAR Adaptive Thresholding For A DS/CDMA Mobile Communicationjouini abdelhafidNo ratings yet
- Comparaison AlgosDocument5 pagesComparaison AlgosLamiae SqualiNo ratings yet
- Normalised LMSDocument32 pagesNormalised LMSrraj.be4543No ratings yet
- Design of A Numerical Adaptive Relay Based On Memory Mapped TechniquesDocument5 pagesDesign of A Numerical Adaptive Relay Based On Memory Mapped TechniquesRidae AishaNo ratings yet
- End To End Performance of Multiple Input MultipleDocument7 pagesEnd To End Performance of Multiple Input MultipleMohamed Omar BabanaNo ratings yet
- Do Cum en To 10348Document14 pagesDo Cum en To 10348Abdul KaderNo ratings yet
- Simulation of A CDMA Systems Using Linear Prediction and MUD (Matlab)Document44 pagesSimulation of A CDMA Systems Using Linear Prediction and MUD (Matlab)Raj Kumar100% (2)
- Pseudorandom Number Generator Based On The Residue Number System and Its FPGA ImplementationDocument6 pagesPseudorandom Number Generator Based On The Residue Number System and Its FPGA ImplementationyeiaNo ratings yet
- Digital Beam Former Architecture For Sixteen Elements Planar Phased Array RadarDocument7 pagesDigital Beam Former Architecture For Sixteen Elements Planar Phased Array RadarAnsh SinghNo ratings yet
- Performance Analysis of Direction of Arrival Algorithms For Smart AntennaDocument9 pagesPerformance Analysis of Direction of Arrival Algorithms For Smart AntennaSukanya VemulapalliNo ratings yet
- Algo For DOADocument4 pagesAlgo For DOAsantosh KumarNo ratings yet
- 1 s2.0 S0026269219309346 MainDocument9 pages1 s2.0 S0026269219309346 MainShylu SamNo ratings yet
- Parafac Almeida 2020 2 PDFDocument6 pagesParafac Almeida 2020 2 PDFZakaria EL KHILANINo ratings yet
- Analysis of Timing Synchronization Techniques in OFDM For SDR Waveform Performance ComparisonDocument6 pagesAnalysis of Timing Synchronization Techniques in OFDM For SDR Waveform Performance ComparisonÖzkan SezerNo ratings yet
- Full Waveform Analysis For Long Range 3D Imaging Laser RadarDocument12 pagesFull Waveform Analysis For Long Range 3D Imaging Laser RadarmcgagliardiNo ratings yet
- Analysis of Different Routing Protocols For Wireless Dense NetworkDocument3 pagesAnalysis of Different Routing Protocols For Wireless Dense Networkعلي الورفليNo ratings yet
- VLSI Implementation of MIMO Detection Using The Sphere Decoding AlgorithmDocument12 pagesVLSI Implementation of MIMO Detection Using The Sphere Decoding AlgorithmQaisar NadeemNo ratings yet
- Mobile Station Location Using Genetic Algorithm Optimized Radio Frequency FingerprintingDocument5 pagesMobile Station Location Using Genetic Algorithm Optimized Radio Frequency Fingerprintingraman yarramilliNo ratings yet
- Radio ModulationDocument11 pagesRadio Modulationneerajcet76No ratings yet
- Digital Communications and Networks: Martin Damrath, Peter Adam Hoeher, Gilbert J.M. ForkelDocument8 pagesDigital Communications and Networks: Martin Damrath, Peter Adam Hoeher, Gilbert J.M. ForkelrolingNo ratings yet
- Distance RelayDocument7 pagesDistance RelayjeyavanianbudanNo ratings yet
- Unified Error Rate of Full Duplex Under Relaying: NtroductionDocument4 pagesUnified Error Rate of Full Duplex Under Relaying: NtroductionabhijeetNo ratings yet
- Fault Tolerant Matrix Pencil Method For Direction of Arrival EstimationDocument13 pagesFault Tolerant Matrix Pencil Method For Direction of Arrival EstimationsipijNo ratings yet
- 5.another Format Paper 2Document6 pages5.another Format Paper 2iisteNo ratings yet
- A RouthrayDocument15 pagesA Routhrayahin banerjeeNo ratings yet
- Performance Analysis of Rls Over Lms Algorithm For Mse in Adaptive FiltersDocument5 pagesPerformance Analysis of Rls Over Lms Algorithm For Mse in Adaptive FiltersNikhil CherianNo ratings yet
- Ijwmn 050307Document10 pagesIjwmn 050307John BergNo ratings yet
- Interference Compression and Mitigation For Automotive FMCW Radar SystemsDocument11 pagesInterference Compression and Mitigation For Automotive FMCW Radar Systemswho3No ratings yet
- Performance Analysis of MIMO OFDM System Using BPSK & QPSKDocument7 pagesPerformance Analysis of MIMO OFDM System Using BPSK & QPSKYimelis EndeshawNo ratings yet
- WMMSE-based Multiuser MIMO Beamforming: A Practice-Oriented Design and LTE System Performance EvaluationDocument5 pagesWMMSE-based Multiuser MIMO Beamforming: A Practice-Oriented Design and LTE System Performance EvaluationTươi Những Chàng TraiNo ratings yet
- Performance of Beamforming For Smart Antenna Using Traditional LMS Algorithm For Various ParametersDocument6 pagesPerformance of Beamforming For Smart Antenna Using Traditional LMS Algorithm For Various ParametersHải Ninh VănNo ratings yet
- An Overview of Feature-Based Methods For Digital Modulation ClassificationDocument7 pagesAn Overview of Feature-Based Methods For Digital Modulation ClassificationHayder HadiNo ratings yet
- Joint Calibration Algorithm For Gain-Phase and MutDocument9 pagesJoint Calibration Algorithm For Gain-Phase and MutWang GuohuaNo ratings yet
- Software Defined Adaptive Codec For Cognitive RadioDocument10 pagesSoftware Defined Adaptive Codec For Cognitive RadioShraddha Bansal100% (1)
- A Transformer Fault Diagnosis Method Based On paraDocument13 pagesA Transformer Fault Diagnosis Method Based On paraHafiziAhmadNo ratings yet
- Journal of Asian Scientific Research: Department of Physics, College of Science, Mosul University Mosul - IraqDocument8 pagesJournal of Asian Scientific Research: Department of Physics, College of Science, Mosul University Mosul - IraqFauzan RohmadNo ratings yet
- Dual Field Arithmetic Architectures For Cryptography and DSP ApplicationsDocument7 pagesDual Field Arithmetic Architectures For Cryptography and DSP ApplicationslambanaveenNo ratings yet
- Sciencedirect SciencedirectDocument10 pagesSciencedirect SciencedirectTuraka CharithaNo ratings yet
- Spectral Efficiency of Uplink SCMA System With CSI EstimationDocument7 pagesSpectral Efficiency of Uplink SCMA System With CSI EstimationMoayad MkhlefNo ratings yet
- Bayesian and RBF Structures For Re Less Co U Cat Ions Detect IonDocument10 pagesBayesian and RBF Structures For Re Less Co U Cat Ions Detect IonAr FatimzahraNo ratings yet
- Computer Processing of Remotely-Sensed Images: An IntroductionFrom EverandComputer Processing of Remotely-Sensed Images: An IntroductionNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- EPLAN Pro Panel v2Document5 pagesEPLAN Pro Panel v2kais alviNo ratings yet
- Oil Xmer TankDocument5 pagesOil Xmer Tankkais alviNo ratings yet
- Rotor 6Document6 pagesRotor 6kais alviNo ratings yet
- Im MotorDocument6 pagesIm Motorkais alviNo ratings yet
- Panel Builder PDFDocument150 pagesPanel Builder PDFkais alvi50% (2)
- Electrical Seminar Presentation: Harmonic Distortion, Effects and MitigationDocument48 pagesElectrical Seminar Presentation: Harmonic Distortion, Effects and Mitigationkais alviNo ratings yet
- Application of ADRC in Hydraulic AGC SystemDocument4 pagesApplication of ADRC in Hydraulic AGC Systemquang caoNo ratings yet
- Computational Electromagnetics: The Finite-Difference Time-DomainDocument11 pagesComputational Electromagnetics: The Finite-Difference Time-DomainAlagu MurugesanNo ratings yet
- BIT 1000/1100 Test 4 - Solutions November 2010Document2 pagesBIT 1000/1100 Test 4 - Solutions November 2010Robert BarrettNo ratings yet
- Classical CryptologyDocument39 pagesClassical CryptologyXulfee JabeerNo ratings yet
- Control Systems Vs Machine LearningDocument2 pagesControl Systems Vs Machine LearningSufiyan N-YoNo ratings yet
- Unit 1 Graph Algorithms-Ii: Structure Page NoDocument32 pagesUnit 1 Graph Algorithms-Ii: Structure Page NofranklinNo ratings yet
- NSRDocument84 pagesNSRmustabshirah.nayerNo ratings yet
- Theory of Automata and Formal Languages Ecs403Document3 pagesTheory of Automata and Formal Languages Ecs403compiler&automataNo ratings yet
- Cormen SolutionDocument4 pagesCormen SolutionJaveria AkbarNo ratings yet
- Control MCQDocument11 pagesControl MCQravihbtiNo ratings yet
- Math F212 1122Document3 pagesMath F212 1122shivam12365No ratings yet
- State FunctionDocument15 pagesState FunctionmelprvnNo ratings yet
- Ekonomi Manajerial Pada Ekonomi GlobalDocument26 pagesEkonomi Manajerial Pada Ekonomi GlobalArif DarmawanNo ratings yet
- Python Lab Manual - STUDENTCOPY2Document19 pagesPython Lab Manual - STUDENTCOPY2tupprofraviNo ratings yet
- Or Final Soln F98Document14 pagesOr Final Soln F98Jay PatelNo ratings yet
- 2ND Code CoverageDocument5 pages2ND Code CoveragejanakikunalNo ratings yet
- Metis Bootcamp CurriculumDocument18 pagesMetis Bootcamp CurriculumEthvasNo ratings yet
- Two Dimensional Random VariableDocument27 pagesTwo Dimensional Random VariableBharghav RoyNo ratings yet
- Production-System Optimization of Gas Fields Using Hybrid Fuzzy/Genetic ApproachDocument9 pagesProduction-System Optimization of Gas Fields Using Hybrid Fuzzy/Genetic ApproachLimberg Tola MaytaNo ratings yet
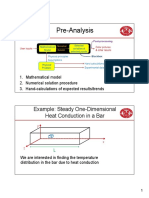
- Pre-Analysis: Example: Steady One-Dimensional Heat Conduction in A BarDocument12 pagesPre-Analysis: Example: Steady One-Dimensional Heat Conduction in A BarJhuliani CristinaNo ratings yet
- Develop and Use-WPS OfficeDocument4 pagesDevelop and Use-WPS OfficeMerra Mae S. ArmadaNo ratings yet
- Design Analys Sample SurveyDocument10 pagesDesign Analys Sample SurveyEPAH SIRENGONo ratings yet
- Derivative Analytics With PythonDocument15 pagesDerivative Analytics With Pythonnaman.agarwal.ec19No ratings yet
- Asm1 Dsa Anhdvhbhaf 190004Document39 pagesAsm1 Dsa Anhdvhbhaf 190004Hưng LêNo ratings yet
- PureMaths2 20220524Document16 pagesPureMaths2 20220524karuneshnNo ratings yet
- Additional Binary Tree OperationsDocument17 pagesAdditional Binary Tree OperationsSang Hyeok KimNo ratings yet
- 16 Important Data Science PapersDocument248 pages16 Important Data Science PapersManjunath.RNo ratings yet
- Daa - Mini - Project (1) OrginalDocument21 pagesDaa - Mini - Project (1) OrginalHarsh GuptaNo ratings yet
- Final Year Project & ThesisDocument2 pagesFinal Year Project & ThesisYasir MohiuddinNo ratings yet
- FEA 2016 v11 Release NoteDocument12 pagesFEA 2016 v11 Release NoteKlLeeNo ratings yet