
16.22 EXCALC: A Differential Geometry Package: Acknowledgments
16.22 EXCALC: A Differential Geometry Package: Acknowledgments
You might also like
- Calculus Strauss PDFDocument1,114 pagesCalculus Strauss PDFR.V. Raghavan76% (38)
- Connect 4 Research PaperDocument15 pagesConnect 4 Research PaperReema AmgadNo ratings yet
- H2 Math NotesDocument2 pagesH2 Math NotesKahSeng TengNo ratings yet
- AE 483 Linear Algebra Review PDFDocument12 pagesAE 483 Linear Algebra Review PDFpuhumightNo ratings yet
- Chapter 9 SolutionsDocument99 pagesChapter 9 Solutionsapi-2098686360% (1)
- LA Cheat SheetDocument1 pageLA Cheat SheetMuhammad RizwanNo ratings yet
- VjtiDocument44 pagesVjtiOfficerNo ratings yet
- Vector Calculus 1Document15 pagesVector Calculus 1AndreaMiccaBautistaNo ratings yet
- 5 FPDocument27 pages5 FPan.nguyenhoang2003No ratings yet
- Mathematics-Ii: Prepared By: Ms. K. Rama Jyothi,: Mr. G Nagendra KumarDocument118 pagesMathematics-Ii: Prepared By: Ms. K. Rama Jyothi,: Mr. G Nagendra KumarNithya SridharNo ratings yet
- Chapter 13 - Differential Equation (1) StudentDocument42 pagesChapter 13 - Differential Equation (1) Studentqjm9n9hx7xNo ratings yet
- Springer Journal of Productivity Analysis: This Content Downloaded From 103.76.140.130 On Fri, 22 May 2020 12:08:44 UTCDocument12 pagesSpringer Journal of Productivity Analysis: This Content Downloaded From 103.76.140.130 On Fri, 22 May 2020 12:08:44 UTCSanjeet Singh PhogatNo ratings yet
- Handout FEniCSDocument16 pagesHandout FEniCSlatecNo ratings yet
- Theory and Formulas For Backpropagation in Hilbert SpacesDocument27 pagesTheory and Formulas For Backpropagation in Hilbert SpacesdanielcrespinNo ratings yet
- Chapter 3 Functions and GraphsDocument39 pagesChapter 3 Functions and Graphssyamim ikram bin mohd zamriNo ratings yet
- What Is Product RuleDocument4 pagesWhat Is Product RulenishagoyalNo ratings yet
- A Multiplicative Directional Distance FunctionDocument14 pagesA Multiplicative Directional Distance FunctionPoguydfNo ratings yet
- Functions and Their Graphs Section 1.1Document13 pagesFunctions and Their Graphs Section 1.1YoussefEmadNo ratings yet
- λ-Calculus: a Turing machine."-Alonzo ChurchDocument13 pagesλ-Calculus: a Turing machine."-Alonzo ChurchBrianNo ratings yet
- Group 6: By: Mirador, Vien Quidez, Jessa Mae Rebota, Rene Joy Rebultan, Diane Rose Reyes, Lesly Ann Rivera, GracielDocument15 pagesGroup 6: By: Mirador, Vien Quidez, Jessa Mae Rebota, Rene Joy Rebultan, Diane Rose Reyes, Lesly Ann Rivera, GracielRene joy rebotaNo ratings yet
- Mathcamp - Lec1 - KopiaDocument49 pagesMathcamp - Lec1 - KopiaPhilippeBourghardtNo ratings yet
- CEN111: Programming I: International Burch UniversityDocument8 pagesCEN111: Programming I: International Burch Universitylu cucuNo ratings yet
- CS 294-73 Software Engineering For Scientific Computing Lecture 17: Final Project Homework #4Document46 pagesCS 294-73 Software Engineering For Scientific Computing Lecture 17: Final Project Homework #4Edmund ZinNo ratings yet
- Differential Calculus: Engr. Joeydann M. TelinDocument41 pagesDifferential Calculus: Engr. Joeydann M. TelinJoey TelinNo ratings yet
- Double and Iterated IntegralsDocument10 pagesDouble and Iterated IntegralsSandeep SajuNo ratings yet
- Generalized Distances and Generalized ProjectionsDocument20 pagesGeneralized Distances and Generalized Projections吴善统No ratings yet
- Calculus I Chapter 1 (Printed Version)Document109 pagesCalculus I Chapter 1 (Printed Version)Ngv GiangNo ratings yet
- Sneha Pal, 538Document16 pagesSneha Pal, 538Aalu JiNo ratings yet
- Digital Signal & Image Processing B Option - 8 Lectures: Stephen Roberts Sjrob@robots - Ox.ac - UkDocument172 pagesDigital Signal & Image Processing B Option - 8 Lectures: Stephen Roberts Sjrob@robots - Ox.ac - UkDotressus MmokNo ratings yet
- Applications of DerivativesDocument14 pagesApplications of DerivativesGlobal EnterpriseNo ratings yet
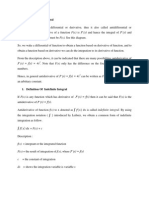
- Definition of IntegralDocument7 pagesDefinition of IntegralwidhissNo ratings yet
- FunctionDocument17 pagesFunctionAc CruzNo ratings yet
- Openstax - Multivariable Functions & Partial DerivativesDocument144 pagesOpenstax - Multivariable Functions & Partial DerivativesdebbieleeohyeahNo ratings yet
- Sep-09-00-Heat TransferDocument16 pagesSep-09-00-Heat TransferRituparn SinghNo ratings yet
- Delta FunctionDocument4 pagesDelta FunctionRajib AdhikariNo ratings yet
- BSC Hons /information Systems/ 2 Year, Semester 1: Computer Quantitative MethodsDocument18 pagesBSC Hons /information Systems/ 2 Year, Semester 1: Computer Quantitative MethodsSimbarashe MataireNo ratings yet
- D6-4 Eng Math Module 2 Multivariable FunctionsDocument32 pagesD6-4 Eng Math Module 2 Multivariable Functionsdavidchungu47No ratings yet
- Machine Learning and Pattern Recognition Week 8 - BackpropDocument8 pagesMachine Learning and Pattern Recognition Week 8 - BackpropzeliawillscumbergNo ratings yet
- Lecture 1 Math2Document32 pagesLecture 1 Math2yazan alNo ratings yet
- Unit 1 Slideshow PresentationDocument23 pagesUnit 1 Slideshow PresentationJohn Ralph GenabeNo ratings yet
- A Note On The Existence and Construction of Dulac FunctionsDocument11 pagesA Note On The Existence and Construction of Dulac FunctionsChristopher LimachiNo ratings yet
- 1 CalDocument10 pages1 CalVincent ManilaNo ratings yet
- ECM6Lecture4Vitenam 2014Document18 pagesECM6Lecture4Vitenam 2014duyvuNo ratings yet
- P1 Calculus II Partial Differentiation & Multiple IntegrationDocument20 pagesP1 Calculus II Partial Differentiation & Multiple IntegrationRaju ShresthaNo ratings yet
- BP106RMTDocument88 pagesBP106RMTmohamedNo ratings yet
- Partial DifferentiationDocument9 pagesPartial Differentiationsanoj kumarNo ratings yet
- Course MA2321: Michaelmas Term 2015. Assignment 1Document5 pagesCourse MA2321: Michaelmas Term 2015. Assignment 1Walid MustafaNo ratings yet
- MODULE 1 CE Math107EDocument12 pagesMODULE 1 CE Math107EAxl TorrilloNo ratings yet
- Differential Equations Assignment HelpDocument11 pagesDifferential Equations Assignment HelpMath Homework SolverNo ratings yet
- Differential CalculusDocument6 pagesDifferential CalculusGift NathanNo ratings yet
- DOLFIN For Solving PDE With FEDocument12 pagesDOLFIN For Solving PDE With FEJohn VardakisNo ratings yet
- National Open University of Nigeria: School of Science and TechnologyDocument244 pagesNational Open University of Nigeria: School of Science and TechnologyMi MiNo ratings yet
- Calculus I Chapter 1 (Printed Version) PdfToPowerPointDocument109 pagesCalculus I Chapter 1 (Printed Version) PdfToPowerPointNguyễn Minh HoàngNo ratings yet
- Innerproduct ScreenDocument16 pagesInnerproduct ScreenfiaNo ratings yet
- Fitzpatrick, Differential Forms and Vector CalculusDocument6 pagesFitzpatrick, Differential Forms and Vector CalculusΣωτήρης ΝτελήςNo ratings yet
- CalculusDocument31 pagesCalculusGary GalvezNo ratings yet
- Language 0f MathDocument57 pagesLanguage 0f MathChristian Dave Balasa100% (1)
- Multi-Variate Calculus ApplicationsDocument10 pagesMulti-Variate Calculus ApplicationsRamón Quezada AbinaderNo ratings yet
- Integration by Substitution and Integration by Parts: Tony UDocument29 pagesIntegration by Substitution and Integration by Parts: Tony U李华夏No ratings yet
- Calculusstrausspdf PDF FreeDocument1,114 pagesCalculusstrausspdf PDF Freevansh tomarNo ratings yet
- Lesson 1 AntiDerivativesDocument9 pagesLesson 1 AntiDerivativesDanielle David AbandoNo ratings yet
- Maths IntgrationDocument153 pagesMaths IntgrationLI DiaNo ratings yet
- Class 1Document86 pagesClass 1allan surasepNo ratings yet
- Variables or Real Multivariate Function Is A Function With More Than One Argument, With AllDocument8 pagesVariables or Real Multivariate Function Is A Function With More Than One Argument, With AllMhalyn Üü NapuliNo ratings yet
- Form For Pedestrian PDFDocument152 pagesForm For Pedestrian PDFFranz SchindlerNo ratings yet
- Reaction Quimical MQDocument2 pagesReaction Quimical MQFranz SchindlerNo ratings yet
- Born 1925 EngDocument30 pagesBorn 1925 EngFranz SchindlerNo ratings yet
- Asher PeresDocument5 pagesAsher PeresFranz SchindlerNo ratings yet
- Complete Question Bank For Standard Maths XIIDocument92 pagesComplete Question Bank For Standard Maths XIIBhumika BehalNo ratings yet
- Homework 1 Problem 1: Review of VectorsDocument5 pagesHomework 1 Problem 1: Review of Vectors沈智恩No ratings yet
- TensorsDocument32 pagesTensorsAbhishek MishraNo ratings yet
- Ansys - Arc LengthDocument3 pagesAnsys - Arc LengthBram VandorenNo ratings yet
- Position VectorDocument29 pagesPosition VectorWaseem AhmedNo ratings yet
- Derivation of Unit Vectors in Curvilinear CoordinatesDocument2 pagesDerivation of Unit Vectors in Curvilinear CoordinatesAnimesh SenNo ratings yet
- Course HandoutDocument3 pagesCourse HandoutAravind KondamudiNo ratings yet
- 2 Mathematics 1Document3 pages2 Mathematics 1pathir KroNo ratings yet
- Assignment On Linear Algebra: Es1101: Computational Data AnalysisDocument52 pagesAssignment On Linear Algebra: Es1101: Computational Data AnalysisAnish GargNo ratings yet
- Charles Swartz - An Introduction To Functional Analysis-M. Dekker (1992) PDFDocument615 pagesCharles Swartz - An Introduction To Functional Analysis-M. Dekker (1992) PDFSyed Mustafa MunirNo ratings yet
- Vector Calculus and Linear Algebra: Gujarat Technological UniversityDocument3 pagesVector Calculus and Linear Algebra: Gujarat Technological Universitygecg ICNo ratings yet
- Libro 2. An Introduction To R For Spatial Analysis and MappDocument395 pagesLibro 2. An Introduction To R For Spatial Analysis and Mappbrandon barrera100% (2)
- Visit Youtube Channel Prajeeshmath For More MaterialsDocument11 pagesVisit Youtube Channel Prajeeshmath For More MaterialsSunnyNo ratings yet
- ImagingTools D82Document114 pagesImagingTools D82gimmyhead_69No ratings yet
- Coordinate Geometry and VectorDocument23 pagesCoordinate Geometry and VectorMuhammad RakibNo ratings yet
- Fundamentals of Semiconductor Physics and DevicesDocument786 pagesFundamentals of Semiconductor Physics and Devicestolentino.jason1222No ratings yet
- Final JR Iit Co Super Chaina-Micro Teaching Schedule - QP Allotment-2023-24 - (Code-02-07-2023)Document77 pagesFinal JR Iit Co Super Chaina-Micro Teaching Schedule - QP Allotment-2023-24 - (Code-02-07-2023)LEGEND GAMINGYTNo ratings yet
- Lyons Frobenius TheoremDocument38 pagesLyons Frobenius TheoremYanh Vissuet OliverNo ratings yet
- Study On Impact of Media On Education Using Fuzzy Relational MapsDocument3 pagesStudy On Impact of Media On Education Using Fuzzy Relational MapsiirNo ratings yet
- LA5Document3 pagesLA5Rahat Ali KhanNo ratings yet
- G I C Lecturer SyllabusDocument4 pagesG I C Lecturer SyllabusGYAN CHANDRA SINGHNo ratings yet
- Rotation of Mode ShapesDocument2 pagesRotation of Mode Shapescelestinodl736No ratings yet
- Important Books For IITDocument13 pagesImportant Books For IITChennaiSuperkings100% (2)
- Commuting Vector FieldsDocument39 pagesCommuting Vector FieldsJimmy Támara AlbinoNo ratings yet




























































































Download as pdf or txt
You might also like
- Calculus Strauss PDFDocument1,114 pagesCalculus Strauss PDFR.V. Raghavan76% (38)
- Connect 4 Research PaperDocument15 pagesConnect 4 Research PaperReema AmgadNo ratings yet
- H2 Math NotesDocument2 pagesH2 Math NotesKahSeng TengNo ratings yet
- AE 483 Linear Algebra Review PDFDocument12 pagesAE 483 Linear Algebra Review PDFpuhumightNo ratings yet
- Chapter 9 SolutionsDocument99 pagesChapter 9 Solutionsapi-2098686360% (1)
- LA Cheat SheetDocument1 pageLA Cheat SheetMuhammad RizwanNo ratings yet
- VjtiDocument44 pagesVjtiOfficerNo ratings yet
- Vector Calculus 1Document15 pagesVector Calculus 1AndreaMiccaBautistaNo ratings yet
- 5 FPDocument27 pages5 FPan.nguyenhoang2003No ratings yet
- Mathematics-Ii: Prepared By: Ms. K. Rama Jyothi,: Mr. G Nagendra KumarDocument118 pagesMathematics-Ii: Prepared By: Ms. K. Rama Jyothi,: Mr. G Nagendra KumarNithya SridharNo ratings yet
- Chapter 13 - Differential Equation (1) StudentDocument42 pagesChapter 13 - Differential Equation (1) Studentqjm9n9hx7xNo ratings yet
- Springer Journal of Productivity Analysis: This Content Downloaded From 103.76.140.130 On Fri, 22 May 2020 12:08:44 UTCDocument12 pagesSpringer Journal of Productivity Analysis: This Content Downloaded From 103.76.140.130 On Fri, 22 May 2020 12:08:44 UTCSanjeet Singh PhogatNo ratings yet
- Handout FEniCSDocument16 pagesHandout FEniCSlatecNo ratings yet
- Theory and Formulas For Backpropagation in Hilbert SpacesDocument27 pagesTheory and Formulas For Backpropagation in Hilbert SpacesdanielcrespinNo ratings yet
- Chapter 3 Functions and GraphsDocument39 pagesChapter 3 Functions and Graphssyamim ikram bin mohd zamriNo ratings yet
- What Is Product RuleDocument4 pagesWhat Is Product RulenishagoyalNo ratings yet
- A Multiplicative Directional Distance FunctionDocument14 pagesA Multiplicative Directional Distance FunctionPoguydfNo ratings yet
- Functions and Their Graphs Section 1.1Document13 pagesFunctions and Their Graphs Section 1.1YoussefEmadNo ratings yet
- λ-Calculus: a Turing machine."-Alonzo ChurchDocument13 pagesλ-Calculus: a Turing machine."-Alonzo ChurchBrianNo ratings yet
- Group 6: By: Mirador, Vien Quidez, Jessa Mae Rebota, Rene Joy Rebultan, Diane Rose Reyes, Lesly Ann Rivera, GracielDocument15 pagesGroup 6: By: Mirador, Vien Quidez, Jessa Mae Rebota, Rene Joy Rebultan, Diane Rose Reyes, Lesly Ann Rivera, GracielRene joy rebotaNo ratings yet
- Mathcamp - Lec1 - KopiaDocument49 pagesMathcamp - Lec1 - KopiaPhilippeBourghardtNo ratings yet
- CEN111: Programming I: International Burch UniversityDocument8 pagesCEN111: Programming I: International Burch Universitylu cucuNo ratings yet
- CS 294-73 Software Engineering For Scientific Computing Lecture 17: Final Project Homework #4Document46 pagesCS 294-73 Software Engineering For Scientific Computing Lecture 17: Final Project Homework #4Edmund ZinNo ratings yet
- Differential Calculus: Engr. Joeydann M. TelinDocument41 pagesDifferential Calculus: Engr. Joeydann M. TelinJoey TelinNo ratings yet
- Double and Iterated IntegralsDocument10 pagesDouble and Iterated IntegralsSandeep SajuNo ratings yet
- Generalized Distances and Generalized ProjectionsDocument20 pagesGeneralized Distances and Generalized Projections吴善统No ratings yet
- Calculus I Chapter 1 (Printed Version)Document109 pagesCalculus I Chapter 1 (Printed Version)Ngv GiangNo ratings yet
- Sneha Pal, 538Document16 pagesSneha Pal, 538Aalu JiNo ratings yet
- Digital Signal & Image Processing B Option - 8 Lectures: Stephen Roberts Sjrob@robots - Ox.ac - UkDocument172 pagesDigital Signal & Image Processing B Option - 8 Lectures: Stephen Roberts Sjrob@robots - Ox.ac - UkDotressus MmokNo ratings yet
- Applications of DerivativesDocument14 pagesApplications of DerivativesGlobal EnterpriseNo ratings yet
- Definition of IntegralDocument7 pagesDefinition of IntegralwidhissNo ratings yet
- FunctionDocument17 pagesFunctionAc CruzNo ratings yet
- Openstax - Multivariable Functions & Partial DerivativesDocument144 pagesOpenstax - Multivariable Functions & Partial DerivativesdebbieleeohyeahNo ratings yet
- Sep-09-00-Heat TransferDocument16 pagesSep-09-00-Heat TransferRituparn SinghNo ratings yet
- Delta FunctionDocument4 pagesDelta FunctionRajib AdhikariNo ratings yet
- BSC Hons /information Systems/ 2 Year, Semester 1: Computer Quantitative MethodsDocument18 pagesBSC Hons /information Systems/ 2 Year, Semester 1: Computer Quantitative MethodsSimbarashe MataireNo ratings yet
- D6-4 Eng Math Module 2 Multivariable FunctionsDocument32 pagesD6-4 Eng Math Module 2 Multivariable Functionsdavidchungu47No ratings yet
- Machine Learning and Pattern Recognition Week 8 - BackpropDocument8 pagesMachine Learning and Pattern Recognition Week 8 - BackpropzeliawillscumbergNo ratings yet
- Lecture 1 Math2Document32 pagesLecture 1 Math2yazan alNo ratings yet
- Unit 1 Slideshow PresentationDocument23 pagesUnit 1 Slideshow PresentationJohn Ralph GenabeNo ratings yet
- A Note On The Existence and Construction of Dulac FunctionsDocument11 pagesA Note On The Existence and Construction of Dulac FunctionsChristopher LimachiNo ratings yet
- 1 CalDocument10 pages1 CalVincent ManilaNo ratings yet
- ECM6Lecture4Vitenam 2014Document18 pagesECM6Lecture4Vitenam 2014duyvuNo ratings yet
- P1 Calculus II Partial Differentiation & Multiple IntegrationDocument20 pagesP1 Calculus II Partial Differentiation & Multiple IntegrationRaju ShresthaNo ratings yet
- BP106RMTDocument88 pagesBP106RMTmohamedNo ratings yet
- Partial DifferentiationDocument9 pagesPartial Differentiationsanoj kumarNo ratings yet
- Course MA2321: Michaelmas Term 2015. Assignment 1Document5 pagesCourse MA2321: Michaelmas Term 2015. Assignment 1Walid MustafaNo ratings yet
- MODULE 1 CE Math107EDocument12 pagesMODULE 1 CE Math107EAxl TorrilloNo ratings yet
- Differential Equations Assignment HelpDocument11 pagesDifferential Equations Assignment HelpMath Homework SolverNo ratings yet
- Differential CalculusDocument6 pagesDifferential CalculusGift NathanNo ratings yet
- DOLFIN For Solving PDE With FEDocument12 pagesDOLFIN For Solving PDE With FEJohn VardakisNo ratings yet
- National Open University of Nigeria: School of Science and TechnologyDocument244 pagesNational Open University of Nigeria: School of Science and TechnologyMi MiNo ratings yet
- Calculus I Chapter 1 (Printed Version) PdfToPowerPointDocument109 pagesCalculus I Chapter 1 (Printed Version) PdfToPowerPointNguyễn Minh HoàngNo ratings yet
- Innerproduct ScreenDocument16 pagesInnerproduct ScreenfiaNo ratings yet
- Fitzpatrick, Differential Forms and Vector CalculusDocument6 pagesFitzpatrick, Differential Forms and Vector CalculusΣωτήρης ΝτελήςNo ratings yet
- CalculusDocument31 pagesCalculusGary GalvezNo ratings yet
- Language 0f MathDocument57 pagesLanguage 0f MathChristian Dave Balasa100% (1)
- Multi-Variate Calculus ApplicationsDocument10 pagesMulti-Variate Calculus ApplicationsRamón Quezada AbinaderNo ratings yet
- Integration by Substitution and Integration by Parts: Tony UDocument29 pagesIntegration by Substitution and Integration by Parts: Tony U李华夏No ratings yet
- Calculusstrausspdf PDF FreeDocument1,114 pagesCalculusstrausspdf PDF Freevansh tomarNo ratings yet
- Lesson 1 AntiDerivativesDocument9 pagesLesson 1 AntiDerivativesDanielle David AbandoNo ratings yet
- Maths IntgrationDocument153 pagesMaths IntgrationLI DiaNo ratings yet
- Class 1Document86 pagesClass 1allan surasepNo ratings yet
- Variables or Real Multivariate Function Is A Function With More Than One Argument, With AllDocument8 pagesVariables or Real Multivariate Function Is A Function With More Than One Argument, With AllMhalyn Üü NapuliNo ratings yet
- Form For Pedestrian PDFDocument152 pagesForm For Pedestrian PDFFranz SchindlerNo ratings yet
- Reaction Quimical MQDocument2 pagesReaction Quimical MQFranz SchindlerNo ratings yet
- Born 1925 EngDocument30 pagesBorn 1925 EngFranz SchindlerNo ratings yet
- Asher PeresDocument5 pagesAsher PeresFranz SchindlerNo ratings yet
- Complete Question Bank For Standard Maths XIIDocument92 pagesComplete Question Bank For Standard Maths XIIBhumika BehalNo ratings yet
- Homework 1 Problem 1: Review of VectorsDocument5 pagesHomework 1 Problem 1: Review of Vectors沈智恩No ratings yet
- TensorsDocument32 pagesTensorsAbhishek MishraNo ratings yet
- Ansys - Arc LengthDocument3 pagesAnsys - Arc LengthBram VandorenNo ratings yet
- Position VectorDocument29 pagesPosition VectorWaseem AhmedNo ratings yet
- Derivation of Unit Vectors in Curvilinear CoordinatesDocument2 pagesDerivation of Unit Vectors in Curvilinear CoordinatesAnimesh SenNo ratings yet
- Course HandoutDocument3 pagesCourse HandoutAravind KondamudiNo ratings yet
- 2 Mathematics 1Document3 pages2 Mathematics 1pathir KroNo ratings yet
- Assignment On Linear Algebra: Es1101: Computational Data AnalysisDocument52 pagesAssignment On Linear Algebra: Es1101: Computational Data AnalysisAnish GargNo ratings yet
- Charles Swartz - An Introduction To Functional Analysis-M. Dekker (1992) PDFDocument615 pagesCharles Swartz - An Introduction To Functional Analysis-M. Dekker (1992) PDFSyed Mustafa MunirNo ratings yet
- Vector Calculus and Linear Algebra: Gujarat Technological UniversityDocument3 pagesVector Calculus and Linear Algebra: Gujarat Technological Universitygecg ICNo ratings yet
- Libro 2. An Introduction To R For Spatial Analysis and MappDocument395 pagesLibro 2. An Introduction To R For Spatial Analysis and Mappbrandon barrera100% (2)
- Visit Youtube Channel Prajeeshmath For More MaterialsDocument11 pagesVisit Youtube Channel Prajeeshmath For More MaterialsSunnyNo ratings yet
- ImagingTools D82Document114 pagesImagingTools D82gimmyhead_69No ratings yet
- Coordinate Geometry and VectorDocument23 pagesCoordinate Geometry and VectorMuhammad RakibNo ratings yet
- Fundamentals of Semiconductor Physics and DevicesDocument786 pagesFundamentals of Semiconductor Physics and Devicestolentino.jason1222No ratings yet
- Final JR Iit Co Super Chaina-Micro Teaching Schedule - QP Allotment-2023-24 - (Code-02-07-2023)Document77 pagesFinal JR Iit Co Super Chaina-Micro Teaching Schedule - QP Allotment-2023-24 - (Code-02-07-2023)LEGEND GAMINGYTNo ratings yet
- Lyons Frobenius TheoremDocument38 pagesLyons Frobenius TheoremYanh Vissuet OliverNo ratings yet
- Study On Impact of Media On Education Using Fuzzy Relational MapsDocument3 pagesStudy On Impact of Media On Education Using Fuzzy Relational MapsiirNo ratings yet
- LA5Document3 pagesLA5Rahat Ali KhanNo ratings yet
- G I C Lecturer SyllabusDocument4 pagesG I C Lecturer SyllabusGYAN CHANDRA SINGHNo ratings yet
- Rotation of Mode ShapesDocument2 pagesRotation of Mode Shapescelestinodl736No ratings yet
- Important Books For IITDocument13 pagesImportant Books For IITChennaiSuperkings100% (2)
- Commuting Vector FieldsDocument39 pagesCommuting Vector FieldsJimmy Támara AlbinoNo ratings yet