Download as pdf or txt
You might also like
- ADHD Test DIVA 5-0Document12 pagesADHD Test DIVA 5-0Augustin Gireada100% (4)
- DD2 SalariesDocument54 pagesDD2 SalariesLive 5 News100% (1)
- Work HoldingDocument5 pagesWork HoldingKANDALA RAJASHEKAR REDDYNo ratings yet
- Sample LLM SopDocument2 pagesSample LLM SopNAVIN PARIKNo ratings yet
- Design and Manufacturing of 8 Cylinder Hydraulic Fixture For Boring Yoke On VMC 1050Document8 pagesDesign and Manufacturing of 8 Cylinder Hydraulic Fixture For Boring Yoke On VMC 1050The ash Designe GalaryNo ratings yet
- NX Progressive Die WizardDocument4 pagesNX Progressive Die WizardNguyễn Thế Quang Dũng100% (1)
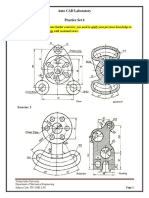
- Auto CAD Lab Practice Set 6Document2 pagesAuto CAD Lab Practice Set 6Techno India UniversityNo ratings yet
- Ansys Report of Knuckle JointDocument27 pagesAnsys Report of Knuckle JointNíthìsh GøwdåNo ratings yet
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotDocument5 pagesAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotPravallika YadavNo ratings yet
- Fabrication of Microelectronic Devices Final - 2 PDFDocument30 pagesFabrication of Microelectronic Devices Final - 2 PDFAdarsh BarnwalNo ratings yet
- MD-18 Power Screws PDFDocument4 pagesMD-18 Power Screws PDFjmartinezmoNo ratings yet
- Format For Mini ProjectDocument5 pagesFormat For Mini ProjectSavantNo ratings yet
- Define PatternDocument6 pagesDefine PatternaadhanNo ratings yet
- Unit Test 1-PPCE A Question PaperDocument2 pagesUnit Test 1-PPCE A Question PaperDpec MechNo ratings yet
- NX CAD Training ReportDocument22 pagesNX CAD Training ReportSatyam SharmaNo ratings yet
- Course Syllabus Manufacturing Processes (1) Metal CuttingDocument4 pagesCourse Syllabus Manufacturing Processes (1) Metal CuttingG. Dancer GhNo ratings yet
- Sheet Metal Design FENDERDocument35 pagesSheet Metal Design FENDERAnti VenomNo ratings yet
- Computer Aided Design and Computer Aided Manufacturing: Ashima WadhwaDocument15 pagesComputer Aided Design and Computer Aided Manufacturing: Ashima WadhwaGopikrishna KakaniNo ratings yet
- ASMEY14.5M Geometric Dimensioning and TolerancingDocument239 pagesASMEY14.5M Geometric Dimensioning and TolerancingVicente Pañol VNo ratings yet
- Design of Circular Form Tool Graphical MethodDocument9 pagesDesign of Circular Form Tool Graphical MethodDIPAK VINAYAK SHIRBHATE100% (1)
- Question Bank BTMEC601 Manufacturing Processes IIDocument14 pagesQuestion Bank BTMEC601 Manufacturing Processes IINeel PawarNo ratings yet
- Additive Manufacturing Student NotesDocument90 pagesAdditive Manufacturing Student NotesUdayaKumar100% (1)
- Shape Function GeneratioDocument34 pagesShape Function Generatiodtr17No ratings yet
- Unit IIIDocument114 pagesUnit IIIManoj Kumar SNo ratings yet
- Lab Manual: Department of Mechanical EngineeringDocument68 pagesLab Manual: Department of Mechanical EngineeringPrabhat Kumar SahuNo ratings yet
- METALWORKINGDocument23 pagesMETALWORKINGDr Rajamani R - PSGCTNo ratings yet
- Solution of "Missing Facet" Problem: by Dr. Vineet SrivastavaDocument9 pagesSolution of "Missing Facet" Problem: by Dr. Vineet SrivastavaRitam GangulyNo ratings yet
- Production Engineering PDFDocument145 pagesProduction Engineering PDFRabinNo ratings yet
- Demo PartDocument4 pagesDemo PartPeaceNo ratings yet
- Lecture3 (1) AssignDocument5 pagesLecture3 (1) AssignMuket AgmasNo ratings yet
- Machine Drawing - 15Me34D: Unit - 1 - Conventional RepresentationDocument22 pagesMachine Drawing - 15Me34D: Unit - 1 - Conventional Representationshreedhar sbNo ratings yet
- Rapid Prototyping and Tooling SyllabusDocument1 pageRapid Prototyping and Tooling SyllabusAravind SelvaNo ratings yet
- Indexing Jigs and FixtureDocument36 pagesIndexing Jigs and FixturePraveen Kumar100% (1)
- Sudipta Nath: Materials EngineeringDocument19 pagesSudipta Nath: Materials EngineeringSudipta NathNo ratings yet
- Press Tool TechDocument48 pagesPress Tool Technikhil sidNo ratings yet
- News Creo Mechanism 10 Tips TricksDocument35 pagesNews Creo Mechanism 10 Tips Trickshiren_mistry55No ratings yet
- Module 3 PDFDocument55 pagesModule 3 PDFSandeep VermaNo ratings yet
- BroachingDocument22 pagesBroachingvijchoudhary16No ratings yet
- ME3393 Manufacturing Processes 03 - by LearnEngineering - inDocument37 pagesME3393 Manufacturing Processes 03 - by LearnEngineering - inUrbhi SahaNo ratings yet
- ME83691-Computer Aided Design and ManufacturingDocument15 pagesME83691-Computer Aided Design and Manufacturingraman thiru55No ratings yet
- Linear Integrated CircuitsDocument43 pagesLinear Integrated CircuitsReymond CañoneroNo ratings yet
- 322 F22 Lecture17 Yield Criteria Flow RulesDocument41 pages322 F22 Lecture17 Yield Criteria Flow Ruleslokesh100% (1)
- Mechanics of Material Lab Report Angle of TwistDocument6 pagesMechanics of Material Lab Report Angle of TwistAhsan MumtazNo ratings yet
- Design and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS WorkbenchDocument27 pagesDesign and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS Workbenchamu100% (1)
- Broaching MachineDocument10 pagesBroaching MachineVinayakNerkarNo ratings yet
- Additive Manufacturing: Department of Mechanical EngineeringDocument64 pagesAdditive Manufacturing: Department of Mechanical EngineeringnareshNo ratings yet
- Design The Suitable Jigs and Fixtures For The Following Components and Also Prepare The Detailed Report With Part DrawingsDocument2 pagesDesign The Suitable Jigs and Fixtures For The Following Components and Also Prepare The Detailed Report With Part DrawingsTamirat Nemomsa100% (1)
- Technical Drawings For Toaster Automata 1Document8 pagesTechnical Drawings For Toaster Automata 1api-371765117No ratings yet
- 18MA743 Precision Engineering SYLLABUSDocument2 pages18MA743 Precision Engineering SYLLABUSmaazkhanNo ratings yet
- Screw Jack Designing Project Report PDFDocument26 pagesScrew Jack Designing Project Report PDFfasil100% (1)
- Iv-Sem DTDMDocument14 pagesIv-Sem DTDMAryanNo ratings yet
- Primary Functions of A ThreadDocument10 pagesPrimary Functions of A ThreadEng-Mohammed Abu NuktaNo ratings yet
- WAAM by HarpuneetDocument25 pagesWAAM by Harpuneethpsingh0078No ratings yet
- Tool Wear and Tool LifeDocument16 pagesTool Wear and Tool Lifedraco555No ratings yet
- Design, Codes and Guidelines: 10.1 OverviewDocument3 pagesDesign, Codes and Guidelines: 10.1 OverviewMiljan TrivicNo ratings yet
- 2-Lectures LEC 19 Modifications of The Mohr Theory For Brittle MaterialsDocument41 pages2-Lectures LEC 19 Modifications of The Mohr Theory For Brittle MaterialsNagaraj RamachandrappaNo ratings yet
- Catia Difference Tangent Curvature Curve and Surface AnalysisDocument14 pagesCatia Difference Tangent Curvature Curve and Surface AnalysismeteorATgmailDOTcomNo ratings yet
- Question Paper Code:: Anna University, Polytechnic & SchoolsDocument2 pagesQuestion Paper Code:: Anna University, Polytechnic & SchoolsNatarajan NatarajNo ratings yet
- 3 - PN Junction DiodeDocument7 pages3 - PN Junction DiodeAdel RaweaNo ratings yet
- Inverse Kinematics For A Rhino RobotDocument11 pagesInverse Kinematics For A Rhino RobotsolteanNo ratings yet
- DHKJHDJKHDDDocument4 pagesDHKJHDJKHDDRavindra PawarkarNo ratings yet
- LS30x70-6-5 Memoria CalculoDocument56 pagesLS30x70-6-5 Memoria CalculoJaime Muñoz SaezNo ratings yet
- Lec01 - Atmosphere and Its PropertiesDocument34 pagesLec01 - Atmosphere and Its PropertiesPravallika YadavNo ratings yet
- Abp InternalDocument26 pagesAbp InternalPravallika YadavNo ratings yet
- High Temperature Gas Dynamics Assignment Report. Question-4. Student Name: Pravallika K SC Code: SC15B023 Branch: Aerospace Engineering Year: 4 YearDocument15 pagesHigh Temperature Gas Dynamics Assignment Report. Question-4. Student Name: Pravallika K SC Code: SC15B023 Branch: Aerospace Engineering Year: 4 YearPravallika YadavNo ratings yet
- Simulated Annealing: Starting With Steepest Descent MethodDocument28 pagesSimulated Annealing: Starting With Steepest Descent MethodPravallika YadavNo ratings yet
- OTE Assignment-1 PDFDocument2 pagesOTE Assignment-1 PDFPravallika YadavNo ratings yet
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotDocument5 pagesAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotPravallika YadavNo ratings yet
- How Colors Communicate: Anek Pillai Pravallika Yadav Khagesh Bhardwaj Priyesh Jain Manasvi G S Sai AvinashDocument75 pagesHow Colors Communicate: Anek Pillai Pravallika Yadav Khagesh Bhardwaj Priyesh Jain Manasvi G S Sai AvinashPravallika YadavNo ratings yet
- Atmospheric Flight Mechanics: Aircraft PerformanceDocument24 pagesAtmospheric Flight Mechanics: Aircraft PerformancePravallika YadavNo ratings yet
- AE483 - Introduction To Robotics Session 5 - Cartesian Robot (Experiment 4)Document5 pagesAE483 - Introduction To Robotics Session 5 - Cartesian Robot (Experiment 4)Pravallika YadavNo ratings yet
- Fluent-Intro 15.0 WS08b Vortex SheddingDocument39 pagesFluent-Intro 15.0 WS08b Vortex Sheddingmatteo_1234No ratings yet
- Check RRB SSE Syllabus 2015Document3 pagesCheck RRB SSE Syllabus 2015Raje GunaNo ratings yet
- Applied Mechanics (Dynamics)Document4 pagesApplied Mechanics (Dynamics)Adhikari SushilNo ratings yet
- Process Isolation StandardDocument24 pagesProcess Isolation Standardaqeel.sammiNo ratings yet
- Lecture 9 PythonDocument8 pagesLecture 9 PythonSneha DaveNo ratings yet
- JEE Main 2023 Answer Key 30 Jan Shift 1Document34 pagesJEE Main 2023 Answer Key 30 Jan Shift 1Anne BrokeNo ratings yet
- HT906Z - TDS enDocument1 pageHT906Z - TDS enAnimesh Kumar SinghNo ratings yet
- MU Literature SLIDE GATEDocument15 pagesMU Literature SLIDE GATEJulio PCNo ratings yet
- Annual Report 2018Document55 pagesAnnual Report 2018AbNo ratings yet
- KVS Class 8 PT1 Exam Maths Question Paper 2018 by KV SitapurDocument2 pagesKVS Class 8 PT1 Exam Maths Question Paper 2018 by KV Sitapuredge pcNo ratings yet
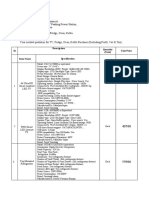
- Sl. Description Quantity (Unit) Unit Price Specification: 1 4k Ultra HD Smart Android Led TVDocument2 pagesSl. Description Quantity (Unit) Unit Price Specification: 1 4k Ultra HD Smart Android Led TVTausif ChowdhuryNo ratings yet
- Organic Cotton Yarn QualityDocument87 pagesOrganic Cotton Yarn QualityMuhammad Qamar TusiefNo ratings yet
- Section A: Pure Mathematics: X + 2 Cos X + 1Document6 pagesSection A: Pure Mathematics: X + 2 Cos X + 1hmphryNo ratings yet
- Crook Nolan Thleats OptimizationofDistributionCentersforAmazonPrimeFinal IEEEDocument11 pagesCrook Nolan Thleats OptimizationofDistributionCentersforAmazonPrimeFinal IEEELimatono Nixon 7033RVXLNo ratings yet
- An Action Research ProposalDocument21 pagesAn Action Research ProposalRICHEL MANGMANGNo ratings yet
- Read Online Textbook Burlar Al Diablo Napoleon Hill 2 Ebook All Chapter PDFDocument22 pagesRead Online Textbook Burlar Al Diablo Napoleon Hill 2 Ebook All Chapter PDFpaul.grizzel865100% (3)
- Module 1 G7 Science Q1 Wk1Document28 pagesModule 1 G7 Science Q1 Wk1Rhisia NoelNo ratings yet
- MH716 Thermal System Design SyllabusDocument2 pagesMH716 Thermal System Design SyllabusUjjaval AminNo ratings yet
- Structure RevisionDocument65 pagesStructure RevisionLMAO NooneNo ratings yet
- CS-63 3Document3 pagesCS-63 3محمد شعيبNo ratings yet
- Jehangir Ratanji Dadabhoy (JRD) Tata, Faquir Chand (F C) KohliDocument7 pagesJehangir Ratanji Dadabhoy (JRD) Tata, Faquir Chand (F C) KohliljhkjgufuNo ratings yet
- Storage VesselsDocument66 pagesStorage VesselsShivam JagtapNo ratings yet
- Practical Concepts of Quality ControlDocument128 pagesPractical Concepts of Quality ControlSchreiber_DiesesNo ratings yet
- Shade in Tea: Is It Beneficial?: S.U Tea Sci. Printed in Sri LankaDocument13 pagesShade in Tea: Is It Beneficial?: S.U Tea Sci. Printed in Sri LankaPutri RatnasariNo ratings yet
- MECHKIT Magnetic Field (Student)Document5 pagesMECHKIT Magnetic Field (Student)Alfonso Salas EnriquezNo ratings yet
- Outstandingacademicachievementawardtill 2021 Ver 0723Document15 pagesOutstandingacademicachievementawardtill 2021 Ver 0723A DNo ratings yet
- Debt and Growth 1Document12 pagesDebt and Growth 1Mame Mandione Laye BoNo ratings yet