Download as pdf or txt
You might also like
- Direccion Asistida Megane 2Document56 pagesDireccion Asistida Megane 2Christiam Ortega100% (1)
- 4613 ReportDocument35 pages4613 ReportRUNLIN MA100% (1)
- VOLVO EC360C HR EC360CHR EXCAVATOR Service Repair Manual PDFDocument19 pagesVOLVO EC360C HR EC360CHR EXCAVATOR Service Repair Manual PDFfjjsjekdmme0% (1)
- Position Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionDocument14 pagesPosition Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionأسامةبوعزيزNo ratings yet
- Online Project of Adaptive Control Systems Applied To The Problem of Solar TrackingDocument9 pagesOnline Project of Adaptive Control Systems Applied To The Problem of Solar TrackingmadsonengNo ratings yet
- A New Approach On Stabilization Control of An InveDocument5 pagesA New Approach On Stabilization Control of An Inveseyed mohsen SalehiNo ratings yet
- Derivation of A Second-Order Switching Surface in The Boundary Control of Buck ConvertersDocument5 pagesDerivation of A Second-Order Switching Surface in The Boundary Control of Buck ConvertersKannan KochumonNo ratings yet
- Mechanical Structural Analysis AND Design Optimization: OF Industrial RobotsDocument29 pagesMechanical Structural Analysis AND Design Optimization: OF Industrial RobotsAhsan AmjadNo ratings yet
- Control of A Magnetic Suspension System: Module Code: Module NameDocument30 pagesControl of A Magnetic Suspension System: Module Code: Module NameruhanNo ratings yet
- Solar Panel Control Using Sliding ModeDocument6 pagesSolar Panel Control Using Sliding ModeIJSRMS JournalNo ratings yet
- Chaotic Dynamics in Electric Arc Furnaces: Fig.2 Mat Lab Implementation of EAF ModelDocument5 pagesChaotic Dynamics in Electric Arc Furnaces: Fig.2 Mat Lab Implementation of EAF Modelankesh_raaz7No ratings yet
- New Technique For Computation of Closest Hopf Bifurcation Point Using Real-Coded Genetic AlgorithmDocument8 pagesNew Technique For Computation of Closest Hopf Bifurcation Point Using Real-Coded Genetic AlgorithmJosaphat GouveiaNo ratings yet
- End-Effector Trajectory Tracking in Flexible Arms Comparison of Approaches Based On Regulation TheoryDocument17 pagesEnd-Effector Trajectory Tracking in Flexible Arms Comparison of Approaches Based On Regulation Theoryoscar201140No ratings yet
- A Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterDocument7 pagesA Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterSriharsha SanthapurNo ratings yet
- Bifurcation Analysis of PWM-1 Voltage-Mode-Controlled Buck Converter Using The Exact Discrete ModelDocument11 pagesBifurcation Analysis of PWM-1 Voltage-Mode-Controlled Buck Converter Using The Exact Discrete Modelrohit17088No ratings yet
- Paper Marnetic2013Document14 pagesPaper Marnetic2013Renan SiqueiraNo ratings yet
- Jemaa20090400002 72158249Document9 pagesJemaa20090400002 72158249Lucian2001No ratings yet
- Modeling and Control of A Rotary Inverted PendulumDocument6 pagesModeling and Control of A Rotary Inverted PendulumsalmanNo ratings yet
- Experiment 2Document8 pagesExperiment 2Usama NadeemNo ratings yet
- High Performance DCDC Buck Converter Using SlidingDocument9 pagesHigh Performance DCDC Buck Converter Using SlidingArivalakan Joyal2002No ratings yet
- Id Iq MethodDocument10 pagesId Iq MethodYellasiri SureshNo ratings yet
- Switching Control of An R/C Hovercraft: Stabilization and Smooth SwitchingDocument11 pagesSwitching Control of An R/C Hovercraft: Stabilization and Smooth SwitchingArunavaNo ratings yet
- Slide Mode Control Current Mode Control in DC-DC Converters: Cristina MorelDocument6 pagesSlide Mode Control Current Mode Control in DC-DC Converters: Cristina MorelJaramillo Rojas IsaacNo ratings yet
- Study On Sliding Mode Control With Reaching Law For DC MotorDocument12 pagesStudy On Sliding Mode Control With Reaching Law For DC MotordhineshpNo ratings yet
- Fine and Simplified Dynamic Modelling of Complex Hydraulic SystemsDocument6 pagesFine and Simplified Dynamic Modelling of Complex Hydraulic SystemsJesús CastellanosNo ratings yet
- Visakh SeminarDocument20 pagesVisakh SeminariagooNo ratings yet
- Master-Slave Sliding-Mode Control Design in Parallel-Connected InvertersDocument8 pagesMaster-Slave Sliding-Mode Control Design in Parallel-Connected Invertersvirus101No ratings yet
- Slidig Mode in Buck PDFDocument6 pagesSlidig Mode in Buck PDFAmar SajiNo ratings yet
- Frequency-Domain Characterization of Sliding Mode Control of An Inverter Used in DSTATCOM ApplicationDocument15 pagesFrequency-Domain Characterization of Sliding Mode Control of An Inverter Used in DSTATCOM ApplicationShwetaGautamNo ratings yet
- Sliding-Mode Robot ControlDocument11 pagesSliding-Mode Robot ControlKiattisak SengchuaiNo ratings yet
- Implementing Field Oriented Control of A Brushless DC MotorDocument10 pagesImplementing Field Oriented Control of A Brushless DC MotorPhạm Văn TưởngNo ratings yet
- Makalah Tugas Akhir PDFDocument10 pagesMakalah Tugas Akhir PDFAchyar Maulana PratamaNo ratings yet
- Global Output-Feedback TrackingDocument6 pagesGlobal Output-Feedback TrackingfarhadcontrolNo ratings yet
- Magnetic Torquer Attitude Control Via Asymptotic Periodic LQRDocument13 pagesMagnetic Torquer Attitude Control Via Asymptotic Periodic LQRKanu GovilaNo ratings yet
- Lab V - PDFDocument4 pagesLab V - PDFZakNo ratings yet
- 2.maths - Ijms - Nonlinear - Sundaram RDocument8 pages2.maths - Ijms - Nonlinear - Sundaram Riaset123No ratings yet
- MCC Mini ProjetDocument5 pagesMCC Mini ProjetMohammed Amine SayehNo ratings yet
- (1987 J.J. Slotine, W. Li) On The Adaptive Control of Robot Manipulators PDFDocument12 pages(1987 J.J. Slotine, W. Li) On The Adaptive Control of Robot Manipulators PDFbagus setyaji100% (1)
- Rotary Inverted PendulumDocument8 pagesRotary Inverted PendulumEduardo BittencourtNo ratings yet
- A Grid-Compatible Virtual Oscillator Controller Analysis and DesignDocument7 pagesA Grid-Compatible Virtual Oscillator Controller Analysis and DesignAdnan KutsiNo ratings yet
- Control Methods For Quadrotors StabilityDocument16 pagesControl Methods For Quadrotors StabilityThien MaiNo ratings yet
- Analysis of Asymmetrical Faults in Power Systems Using Dynamic PhasorsDocument7 pagesAnalysis of Asymmetrical Faults in Power Systems Using Dynamic PhasorsFernando Cattan JusanNo ratings yet
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic AnalysisDimple Sharma100% (1)
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic Analysislamour411100% (1)
- Single-Phase Standalone Inverter With An Integrated Control StructureDocument7 pagesSingle-Phase Standalone Inverter With An Integrated Control Structurejosemat79No ratings yet
- Dynamic AnalysisDocument16 pagesDynamic AnalysisStella PinkNo ratings yet
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic AnalysisDimple SharmaNo ratings yet
- A Simple State Feedback Linearization Control of Multilevel AsvcDocument7 pagesA Simple State Feedback Linearization Control of Multilevel AsvcShadNo ratings yet
- Lecture 2b ModelingDocument40 pagesLecture 2b ModelingCharles CalibreNo ratings yet
- Silicon Diode CharacteristicsDocument8 pagesSilicon Diode CharacteristicsRamadan DawNo ratings yet
- Inverted PendulumDocument18 pagesInverted PendulumLingxi HuangNo ratings yet
- Design of Sliding Mode Controllers For Quadrotor Vehicles Via Flatness-Based Feedback and Feedforward Linearization StrategiesDocument6 pagesDesign of Sliding Mode Controllers For Quadrotor Vehicles Via Flatness-Based Feedback and Feedforward Linearization Strategiesmatteorocco99No ratings yet
- Proceedings of The Institution of Mechanical Engineers - Part I - Journal of Systems and Control Engineering-2002-Buisson-47-63Document18 pagesProceedings of The Institution of Mechanical Engineers - Part I - Journal of Systems and Control Engineering-2002-Buisson-47-63Mustikaning Sekar AnindyajatiNo ratings yet
- Basic Elements of Control SystemDocument36 pagesBasic Elements of Control Systemeugeni madaNo ratings yet
- Vector Control of Induction Motors: Click To Edit Master Subtitle StyleDocument23 pagesVector Control of Induction Motors: Click To Edit Master Subtitle StyleSruthi SubramanianNo ratings yet
- EE6603-PSOC Question BankDocument15 pagesEE6603-PSOC Question BankAnonymous sdfoA3No ratings yet
- Linear Quadratic Regulator Controller For Magnetic Levitation SystemDocument4 pagesLinear Quadratic Regulator Controller For Magnetic Levitation SystemKhethanNo ratings yet
- Accumulator TensionDocument4 pagesAccumulator TensionMostafa MehrjerdiNo ratings yet
- Tracking Control of An Inverted Pendulum Using Computed Feedback Linearization TechniqueDocument6 pagesTracking Control of An Inverted Pendulum Using Computed Feedback Linearization TechniqueAkmalNo ratings yet
- Mathematical Modelling Boost ConverterDocument12 pagesMathematical Modelling Boost ConverterCHERU ABINETNo ratings yet
- The Chattering Problem in Sliding Mode SystemsDocument8 pagesThe Chattering Problem in Sliding Mode SystemsBhaskar BiswasNo ratings yet
- Nonlinear Adaptive Model-Following ControlDocument10 pagesNonlinear Adaptive Model-Following ControlBhaskar BiswasNo ratings yet
- Sliding Controller Design For Non Linear SystemsDocument15 pagesSliding Controller Design For Non Linear SystemsBhaskar BiswasNo ratings yet
- Sliding Mode Control A TutorialDocument6 pagesSliding Mode Control A TutorialBhaskar BiswasNo ratings yet
- Variable Structure Control Nonlinear Multivariable Systems: TutorialDocument21 pagesVariable Structure Control Nonlinear Multivariable Systems: TutorialBhaskar BiswasNo ratings yet
- Chattering Free Sliding Mode Control in Magnetic Levitation SystemDocument7 pagesChattering Free Sliding Mode Control in Magnetic Levitation SystemBhaskar BiswasNo ratings yet
- Purdue OwlDocument57 pagesPurdue Owlapi-309710992No ratings yet
- Caietul Cursantului Chestionare 2015Document13 pagesCaietul Cursantului Chestionare 2015John DoesNo ratings yet
- Piping Design Professional: Kamalakannan ADocument4 pagesPiping Design Professional: Kamalakannan AKamalakannan AyyaduraiNo ratings yet
- Report of Large Motor ReliabilityDocument28 pagesReport of Large Motor Reliabilitythawatchai11222512100% (1)
- Crypto Vs Exchange ComparisonDocument6 pagesCrypto Vs Exchange ComparisonBlockchainDefenderNo ratings yet
- On The Ten-Year Success in The Application of Partial Extraction Therapy: A Systematic ReviewDocument9 pagesOn The Ten-Year Success in The Application of Partial Extraction Therapy: A Systematic ReviewDr Sharique AliNo ratings yet
- Air Brake RDSO Report 0159 Rev - 0 Jan - 2013Document149 pagesAir Brake RDSO Report 0159 Rev - 0 Jan - 2013Niking Thomsan0% (1)
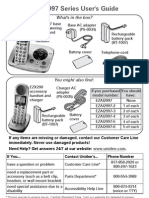
- Uniden Loud and Clear PhoneDocument32 pagesUniden Loud and Clear Phonejmilton59No ratings yet
- Drubanka ChakraDocument4 pagesDrubanka ChakraDayanand PurohitNo ratings yet
- Dwnload Full Leadership Theory Application and Skill Development 6th Edition Lussier Test Bank PDFDocument36 pagesDwnload Full Leadership Theory Application and Skill Development 6th Edition Lussier Test Bank PDFgallivatmetholhvwz0100% (13)
- My Friend, Henry EyringDocument19 pagesMy Friend, Henry EyringBiodiesel Pala FredricksenNo ratings yet
- Preheat and PWHT Procedure: GlobalDocument12 pagesPreheat and PWHT Procedure: GlobalHendra AwanNo ratings yet
- Chapter II - RRLDocument4 pagesChapter II - RRLCassandra LucheNo ratings yet
- SO2ndEdAUnitTest3Document2 pagesSO2ndEdAUnitTest3coilch11No ratings yet
- Course Outline PSPDDocument5 pagesCourse Outline PSPDlokeshNo ratings yet
- 15 Anxiety Worksheets and Workbooks For Teens, Kids, AdultsDocument23 pages15 Anxiety Worksheets and Workbooks For Teens, Kids, AdultsGilang Faisal AndrianNo ratings yet
- JSA Hydrostatic Test Spool Pipe-1Document1 pageJSA Hydrostatic Test Spool Pipe-1Iksan Adityo MulyoNo ratings yet
- Economic and Social Environment Solved Assignment Q6Document2 pagesEconomic and Social Environment Solved Assignment Q6prakash jhaNo ratings yet
- Conceptual FrameworkDocument3 pagesConceptual FrameworkChristoPher TorioNo ratings yet
- Wort Clarity - eDocument3 pagesWort Clarity - eSylab InstrumentsNo ratings yet
- Secret Symbolism: Hari Kumar January 11, 2013 Toronto, CanadaDocument39 pagesSecret Symbolism: Hari Kumar January 11, 2013 Toronto, CanadaHari Kumar100% (9)
- Dieselec IvecoDocument2 pagesDieselec IvecoEber AmadeusNo ratings yet
- Monitoring Times 1997 08Document124 pagesMonitoring Times 1997 08Benjamin DoverNo ratings yet
- Zeroth Review TemplateDocument17 pagesZeroth Review TemplateJeffrey Dan OliverNo ratings yet
- Flir Thermal CamerasDocument3 pagesFlir Thermal CamerasDarkangelcaliNo ratings yet
- Test Bank For Biology 4th Edition by BrookerDocument37 pagesTest Bank For Biology 4th Edition by BrookerShannon Melancon100% (44)
- New Pattern Coding Decoding Capsule 2Document18 pagesNew Pattern Coding Decoding Capsule 2Rima TalukdarNo ratings yet
- Vector Spaces, Linear Algebra, Alexandria UniversityDocument37 pagesVector Spaces, Linear Algebra, Alexandria UniversitySafety Box graduation project 2023No ratings yet