
Professional Documents
Culture Documents
Data Sheet
Data Sheet
Uploaded by
Dumitru EneCopyright:
Available Formats
You might also like
- HP Compaq 6510B SchematicsDocument60 pagesHP Compaq 6510B SchematicsBociu TitusNo ratings yet
- AD5172BRM10 Rab 10k Ohm - 40°C To +125°C 10-Lead MSOP RM-10 D0VDocument28 pagesAD5172BRM10 Rab 10k Ohm - 40°C To +125°C 10-Lead MSOP RM-10 D0VJalal AsadianNo ratings yet
- 3 - Ch. LED Driver For Illumination: Features DescriptionDocument35 pages3 - Ch. LED Driver For Illumination: Features DescriptionSebastian IgnacioNo ratings yet
- ISL6263C IntersilDocument18 pagesISL6263C IntersilCer CerNo ratings yet
- REN Isl29501 DST 20220317Document23 pagesREN Isl29501 DST 20220317aNo ratings yet
- RTD CurcitDocument7 pagesRTD Curcitparmarhitesh0201197No ratings yet
- Designing The VEML6070 UV Light Sensor Into Applications: Optical SensorsDocument14 pagesDesigning The VEML6070 UV Light Sensor Into Applications: Optical SensorsLjubisa DjordjevicNo ratings yet
- Ad7817 7818Document20 pagesAd7817 7818congwem qinNo ratings yet
- ISL6314Document32 pagesISL6314SURESH CHANDRA ROUTNo ratings yet
- 256-Position, One-Time Programmable, Dual-Channel, I C Digital PotentiometersDocument28 pages256-Position, One-Time Programmable, Dual-Channel, I C Digital PotentiometersMhb AliloNo ratings yet
- BOSCH CJ135 Product Information 101201Document2 pagesBOSCH CJ135 Product Information 101201Wang Zheng Feng100% (1)
- Thermal Sensor With SPI Interfa: Features DescriptionDocument22 pagesThermal Sensor With SPI Interfa: Features DescriptioncatalinbujdeiNo ratings yet
- Dual 256-Position I C Compatible Digital Potentiometer AD5243/AD5248Document20 pagesDual 256-Position I C Compatible Digital Potentiometer AD5243/AD5248jose david bermudez perezNo ratings yet
- CMOS, Low Voltage Serially Controlled, Octal SPST Switches: 2.5 V Dual Supply On Resistance On Resistance FlatnessDocument16 pagesCMOS, Low Voltage Serially Controlled, Octal SPST Switches: 2.5 V Dual Supply On Resistance On Resistance Flatnesstzf32799No ratings yet
- AD5241BRZ10 Potenţiometre DigitaleDocument18 pagesAD5241BRZ10 Potenţiometre DigitaleFaulhaber AdrianNo ratings yet
- 12bits Serie SPI AdcDocument34 pages12bits Serie SPI Adclucas_guerrero2No ratings yet
- IDT ZMID520x Short Form Datasheet SDS 20170524Document2 pagesIDT ZMID520x Short Form Datasheet SDS 20170524dineshNo ratings yet
- Main Features: - Set-Top-Boxes - White Goods - Home Appliances - DVD Players and VcrsDocument25 pagesMain Features: - Set-Top-Boxes - White Goods - Home Appliances - DVD Players and VcrsDhivya NNo ratings yet
- CFS.2300+Datasheet+Rev1.9 2018Document24 pagesCFS.2300+Datasheet+Rev1.9 2018BryanNo ratings yet
- AD9225Document25 pagesAD9225rakibul hasanNo ratings yet
- AD7819Document12 pagesAD7819IrvinRamAltNo ratings yet
- Polyphase Energy Metering IC With Pulse Output ADE7752/ADE7752ADocument1 pagePolyphase Energy Metering IC With Pulse Output ADE7752/ADE7752ABárbara ConstanzaNo ratings yet
- Datasheet Isl6262Document27 pagesDatasheet Isl6262Jhones CAMNo ratings yet
- CMOS, 2.5 Triple/Quad SPDT Switches: Low VoltageDocument12 pagesCMOS, 2.5 Triple/Quad SPDT Switches: Low VoltageAsep TatangNo ratings yet
- K Type Thermocouple Meseurement Circuit With Precision ADCDocument9 pagesK Type Thermocouple Meseurement Circuit With Precision ADCmehdi.bzinebNo ratings yet
- 03 Ads9227Document55 pages03 Ads9227CHAMOUXNo ratings yet
- CN 0346Document7 pagesCN 0346smokeiiotNo ratings yet
- CN0303Document6 pagesCN0303FabioDangerNo ratings yet
- Adns-7550 2007Document32 pagesAdns-7550 2007decaedron decaedrumNo ratings yet
- RF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1Document19 pagesRF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1bulli babuNo ratings yet
- Circuit Note: IEPE-Compatible Interface For Wideband MEMS Accelerometer SensorsDocument6 pagesCircuit Note: IEPE-Compatible Interface For Wideband MEMS Accelerometer SensorsLuis CaballeroNo ratings yet
- Low-Voltage, 10-Bit Digital Temperature Sensor in 8-Lead: SoicDocument8 pagesLow-Voltage, 10-Bit Digital Temperature Sensor in 8-Lead: SoicendersonNo ratings yet
- 6-Channel Visible Spectral - ID Device With Electronic Shutter and Smart InterfaceDocument48 pages6-Channel Visible Spectral - ID Device With Electronic Shutter and Smart InterfaceHowTo HackNo ratings yet
- V02 0409en - DS - HCPL 7860 - 2015 03 061 908727Document18 pagesV02 0409en - DS - HCPL 7860 - 2015 03 061 908727Shirley CastañedaNo ratings yet
- Map3511 828Document14 pagesMap3511 828riyad abdulhafeedNo ratings yet
- Isl 6561Document27 pagesIsl 6561PristisNo ratings yet
- Adg728 729-1502949 PDFDocument14 pagesAdg728 729-1502949 PDFJosé Arnaldo SilvaNo ratings yet
- Icne 2521 DDocument7 pagesIcne 2521 Dfraustro2No ratings yet
- SC 2595Document12 pagesSC 2595Stelian DobreNo ratings yet
- 3-Axis Magnetic Sensor QMC5883L: Features BenefitDocument9 pages3-Axis Magnetic Sensor QMC5883L: Features BenefitNMR Digital Service Center Naveen NMRNo ratings yet
- MAX86916 Integrated Optical Sensor Module For Mobile Health: General Description Benefits and FeaturesDocument40 pagesMAX86916 Integrated Optical Sensor Module For Mobile Health: General Description Benefits and Featuresmaria jose rodriguez lopezNo ratings yet
- MAP3511Document14 pagesMAP3511Дмитрий КопышевNo ratings yet
- AS8002 Datasheet en v1Document25 pagesAS8002 Datasheet en v1Anonymous eCmTYonQ84No ratings yet
- +2.7 V To +5.5 V, 350 KSPS, 10-Bit 4-/8-Channel Sampling AdcsDocument1 page+2.7 V To +5.5 V, 350 KSPS, 10-Bit 4-/8-Channel Sampling AdcsAntonio HerreraNo ratings yet
- ADE7912 - 7913 DatasheetDocument41 pagesADE7912 - 7913 Datasheetalbert.sureda.spamNo ratings yet
- 2 SIC9231SE EN Rev1.0Document6 pages2 SIC9231SE EN Rev1.0Vishal dtuNo ratings yet
- MAP3512Document15 pagesMAP3512KhalidNo ratings yet
- AD7892 - LC2MOS Single Supply, 12-Bit 600 KSPS ADCDocument14 pagesAD7892 - LC2MOS Single Supply, 12-Bit 600 KSPS ADCJavierPariNo ratings yet
- Obsolete: Low Cost Accelerometers With Digital Output ADXL202/ADXL210Document11 pagesObsolete: Low Cost Accelerometers With Digital Output ADXL202/ADXL210adfumegaNo ratings yet
- 12-V Voltage Sensing Circuit With An Isolated AmplifierDocument8 pages12-V Voltage Sensing Circuit With An Isolated AmplifierSirJones KekapohNo ratings yet
- ADS8864Document51 pagesADS8864docNo ratings yet
- AD7927Document28 pagesAD7927karoNo ratings yet
- SC6122Document14 pagesSC6122MarocanuMargoNo ratings yet
- TPS8804 Smoke Detector AFE: 1 Features 2 ApplicationsDocument57 pagesTPS8804 Smoke Detector AFE: 1 Features 2 ApplicationsmotaNo ratings yet
- Signal and Power Isolated RS-485 Transceiver With 15 KV ESD ProtectionDocument22 pagesSignal and Power Isolated RS-485 Transceiver With 15 KV ESD ProtectionAndryasDoniIraniNo ratings yet
- Mcp3021a0t-E OtDocument26 pagesMcp3021a0t-E OtVinícius Vasconcelos Do RêgoNo ratings yet
- Agm 1602W-818Document23 pagesAgm 1602W-818Daniel BauerNo ratings yet
- SP14N02L6ALCZ: Customer'S Acceptance SpecificationsDocument22 pagesSP14N02L6ALCZ: Customer'S Acceptance Specificationsjohnbad36No ratings yet
- ADu M3154Document22 pagesADu M3154Sunil Kumar ThakurNo ratings yet
- Analog Dialogue Volume 46, Number 1: Analog Dialogue, #5From EverandAnalog Dialogue Volume 46, Number 1: Analog Dialogue, #5Rating: 5 out of 5 stars5/5 (1)
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- BOOSTXL-DRV8323Rx EVM User's GuideDocument28 pagesBOOSTXL-DRV8323Rx EVM User's GuideJ. Carlos RGNo ratings yet
- AK3918AV100 Series Processors Feature List: Revision: 1.4.0 09/2022Document4 pagesAK3918AV100 Series Processors Feature List: Revision: 1.4.0 09/2022pa.22226499No ratings yet
- Ads 131 A 02Document93 pagesAds 131 A 02dhanabal rNo ratings yet
- Electronic Protection To Exam Paper Leakage IJERTV2IS50588Document7 pagesElectronic Protection To Exam Paper Leakage IJERTV2IS50588AMal MpNo ratings yet
- Artasie AM18X5 RTC DatasheetDocument89 pagesArtasie AM18X5 RTC DatasheetJorge LealNo ratings yet
- Adet S A0006353185 1-2956540Document63 pagesAdet S A0006353185 1-2956540ManunoghiNo ratings yet
- 8-Channel, High Throughput, 24-Bit Sigma-Delta ADC: Data SheetDocument32 pages8-Channel, High Throughput, 24-Bit Sigma-Delta ADC: Data SheetPravin RautNo ratings yet
- DatasheetDocument23 pagesDatasheetWILMER GUTIERREZNo ratings yet
- Install Powerdb 11.2 08FEB19Document49 pagesInstall Powerdb 11.2 08FEB19Jesus R. Argollo EspejoNo ratings yet
- MX25L25635F, 3V, 256Mb, v1.2Document108 pagesMX25L25635F, 3V, 256Mb, v1.2yo manNo ratings yet
- Basys 3 ™ FPGA Board Reference Manual: Revised March 23, 2017 This Manual Applies To The Basys 3 Rev. CDocument19 pagesBasys 3 ™ FPGA Board Reference Manual: Revised March 23, 2017 This Manual Applies To The Basys 3 Rev. CrickymoraNo ratings yet
- PIC18F27 47 57Q84 Data Sheet 40002213DDocument1,146 pagesPIC18F27 47 57Q84 Data Sheet 40002213DGuilherme Leite JSNo ratings yet
- MAX86140/ MAX86141 Best-in-Class Optical Pulse Oximeter and Heart-Rate Sensor For Wearable HealthDocument90 pagesMAX86140/ MAX86141 Best-in-Class Optical Pulse Oximeter and Heart-Rate Sensor For Wearable Healthmaria jose rodriguez lopezNo ratings yet
- Real Time Bridge Monitoring and Alert Generation System Using IotDocument4 pagesReal Time Bridge Monitoring and Alert Generation System Using Iotvishalmate10No ratings yet
- Intel Core I7 PDFDocument73 pagesIntel Core I7 PDFReal MastercraFTNo ratings yet
- STM 32 G 061 C 6Document126 pagesSTM 32 G 061 C 6AlexNo ratings yet
- Jumo Dtrans T03 J, B, T Analog 2-Wire Transmitter With Digital Adjustment Jumo Dtrans T03 Bu, Tu Analog 3-Wire Transmitter With Digital AdjustmentDocument10 pagesJumo Dtrans T03 J, B, T Analog 2-Wire Transmitter With Digital Adjustment Jumo Dtrans T03 Bu, Tu Analog 3-Wire Transmitter With Digital AdjustmentDavid Leonardo Galindo ToapantaNo ratings yet
- MSP 430 DatasheetDocument78 pagesMSP 430 DatasheetKarthik AnanthamNo ratings yet
- 2107 FBDocument32 pages2107 FBdeshonNo ratings yet
- Arrow 0909 Live PPT PDFDocument57 pagesArrow 0909 Live PPT PDFปฏิวัติ ชาติดํารงค์No ratings yet
- Internet of Things Technology 15CS81Document44 pagesInternet of Things Technology 15CS81ArunNo ratings yet
- BEE 049 - Design of Embedded System PDFDocument95 pagesBEE 049 - Design of Embedded System PDFSubhamNo ratings yet
- Unit - 1 IntroductionDocument67 pagesUnit - 1 IntroductionMurali Dhara Sesha Giri Rao GoddantiNo ratings yet
- Samsung Lennon2 Lennon S R BA41 01747A, BA41 01748ADocument43 pagesSamsung Lennon2 Lennon S R BA41 01747A, BA41 01748Adata microNo ratings yet
- Internet of Things: Jarrod Trevathan, PHD, Simon Schmidtke, Wayne Read, PHD, Tony Sharp, Abdul Sattar, PHDDocument18 pagesInternet of Things: Jarrod Trevathan, PHD, Simon Schmidtke, Wayne Read, PHD, Tony Sharp, Abdul Sattar, PHDhighfive pologeeNo ratings yet
- DS2000 Firmware Release NotesDocument5 pagesDS2000 Firmware Release Notest8126No ratings yet
- MG84FG516 DataSheet A1.3 PDFDocument231 pagesMG84FG516 DataSheet A1.3 PDFpiyushpandeyNo ratings yet
- E220-900M30S UserManual EN v1.0Document14 pagesE220-900M30S UserManual EN v1.0Admir BašićNo ratings yet
- GC9307N DataSheet V1.1Document206 pagesGC9307N DataSheet V1.1SpecShareNo ratings yet
























































































Data Sheet
Data Sheet
Uploaded by
Dumitru EneOriginal Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Data Sheet
Data Sheet
Uploaded by
Dumitru EneCopyright:
Available Formats
Rain and Light Sensor 527.
04
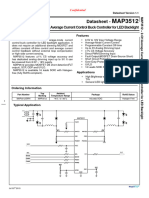
PRODUCT DATA SHEET – May 15, 2017
Features General Description
• Front end optical rain sensor signal processor The RLT ASIC (Rain Light Tunnel Sensor) is intended
• Four input channels for ambient light measurements for controlling an optical sensor unit in automotive wiping
• High sensitivity, no total reflection needed systems or in industrial camera and window systems.
• Very high robustness against ambient influences like It provides two embedded slew rate controlled LED
sun light, aging and dirt drivers with up to 40mA current for stimuli generation.
• Two embedded LED drivers, driving up to 40mA A special, high-sensitive receiver allows processing of a
• Provides a rain drop signal via the WS pin diode input signal without total reflection of the send sig-
• SPI interface nal, allowing reliable detection of rain and water drops.
• Temperature sensor Due to the used HALIOS-SD measurement method a
• Extensive diagnosis during operation very high robustness against ambient influences like sun
• Low bill of materials due to few external components light, any kind of flickering light, aging and dirt is
• AEC-Q100 qualification provided.
The device has four additional input channels for ambi-
Applications ent light measurements.
Communication is provided using a 3- or 4-wire SPI
• Optical rain sensing to control automotive wiping sys- interface for fast and flexible communication.
tems or industrial camera and window systems
• Ambient light measurements to control
• Headlights / lights
Ordering Information
• Head-up displays Ordering Temp. Range Package
• Air conditioning Code
• Pollution sensor E52704A52C -40°C to +105°C QFN20L4
Typical Operating Circuit
LED supply
ALS1
ALS2
ALS3
ALS0
3.3V supply VDDA VREF
CVREF
CVDDA
GNDA
3.3V supply VDDD RS
CVDDD
GNDD
LEDA
GNDL
LEDB
TMODE
MOSI
MISO
ATB
CSB
SCK
WS
SPI to uC
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Functional Diagram
VDDA GNDA VDDD GNDD ATB TMODE
Analog Control Test Control
Temp Supply Monitor Test
References OSC JTAG
VREF Sensor and Reset Register
Diagnosis signals
SPI CSB
Shift
ALI Digital Control Command SCLK
Register
Ambient Light Interface
State Control MOSI
ALS0 Machine Send & Receive
Registers
Register
ALS1 MISO
ALS
ALS2 MUX ADC
ALS Converter LP HP
MUX WS
AMP
ALS3 Filter Filter
ADC
Digital Signal Processing
Demo- LEDA
RS Inte-
RS BP dulator
AMP grator
& Sign LEDB
RSI E527.04
Rain Sensor Interface LED Driver GNDL
Pin Configuration QFN20L4
VREF 16
LEDB 20
GNDL 19
LEDA 18
TMODE 17
1 MOSI 21 EDP RS 15
2 MISO ALS3 14
3 SCLK ALS2 13
4 WS ALS1 12
5 CSB ALS0 11
7 GNDD
9 GNDA
6 VDDD
8 VDDA
10 ATB
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
2 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Pin Description QFN20L4
No Name Type Description
1 MOSI D_ISPI serial data input; internal pull down; master out - slave in
(JTAG pin TDI during test mode)
2 MISO D_O SPI serial data output; master in - slave out (high-impedance state when CSB=1;
always driven when WSFCT=1)
(JTAG pin TDO during test mode)
3 SCLK D_I SPI serial clock; internal pull down
(JTAG pin TCK during test mode)
4 WS AD_IO Digital output pin; internal pull down if not configured as digital output or analog pin
(digital and analog test bus during test mode)
5 CSB D_I SPI chip select; low active; internal pull up
(JTAG pin TMS during test mode)
6 VDDD S Digital supply voltage
7 GNDD S Digital ground
8 VDDA S Analog supply voltage
9 GNDA S Analog ground
10 ATB A_IO not used; internal pull down (analog test bus during test mode)
11 ALS0 A_I Ambient light input current 0;
Input for signal current of Ambient Light Sensor 0
12 ALS1 A_I Ambient light input current 1;
Input for signal current of Ambient Light Sensor 1
13 ALS2 A_I Ambient light input current 2;
Input for signal current of Ambient Light Sensor 2
14 ALS3 A_I Ambient light input current 3;
Input for signal current of Ambient Light Sensor 3
15 RS A_I Rain sensor input current of receiver diode
16 VREF A_O Reference voltage to supply the sensor photo diodes
17 TMODE D_I Test mode enable; active high; internal pull down; when low the JTAG and TMR
are hold in reset
18 LEDA HV_A_O LED driver output; emitting path A
19 GNDL S LEDA/LEDB power ground
20 LEDB HV_A_O LED driver output; emitting path B
21 EDP S Exposed die pad; has to be connected to large copper PCB ground plane for
optimal heat dissipation.
Note: A = Analog, D = Digital, S = Supply, I = Input, O = Output, B = Bidirectional, HV = High Voltage
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
3 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
1 Functional Safety
The development of this product is based on a process according to an ISO/TS
16949 certified quality management system.
Functional safety requirements according to ISO 26262 have not been submitted to ELMOS and therefore have not
been considered for the development of this product.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
4 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
2 Absolute Maximum Ratings
Stresses beyond these absolute maximum ratings listed below may cause permanent damage to the device.
These are stress ratings only; operation of the device at these or any other conditions beyond those listed
in the operational sections of this document is not implied. Exposure to absolute maximum rated conditions
for extended periods may affect device reliability. All voltages referred to VGND. Currents flowing into terminals are
positive, those drawn out of a terminal are negative.
Table 2-1: Absolute Maximum Ratings
No. Description Condition Symbol Min Max Unit
1 Supply voltages VDDA and VDDD VDDx,MAX -0.3 3.6 V
2 Voltage at pins related to VDDA: VA,IO,MAX -0.3 VDDA+0.3 but V
ATB <3.6
3 Voltage at pins related to VDDD: VD,IO,MAX -0.3 VDDD+0.3 but V
SCLK <3.6
MISO
MOSI
CSB
WS
4 Voltage at pin VREF VREF,MAX -0.3 3.6 V
5 Voltage at pins related to VREF: VREF,IO,MAX -0.3 VREF+0.3 but V
RS <3.6
ALS0
ALS1
ALS2
ALS3
6 Voltage at pin TMODE VTMODE,MAX -0.3 3.6 V
7 Voltage at pins LEDA and LEDB VLEDx,MAX -0.3 40 V
8 Current into any ALS pin IALSx,MAX - 1.5 mA
9 Current into pin RS IRS,MAX - 1.5 mA
10 Current into digital I/O pins: ID,IO,MAX -10 10 mA
MOSI
MISO
SCLK
WS
CSB
TMODE
11 Junction temperature TJ,MAX -40 150 °C
12 Storage temperature TSTG -40 125 °C
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
5 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
3 ESD
Table 3-1: ESD Ratings Table
Description Condition Symbol Min Max Unit
ESD HBM protection at pins LEDA, AEC-Q100-002 VESD(HBM) -2 2 kV
LEDB (HBM), C=100pF,
R=1.5kΩ chip level
ESD HBM protection at all other pins AEC-Q100-002 VESD(HBM) -2 2 kV
(HBM), C=100pF,
R=1.5kΩ chip level
ESD CDM protection at all pins AEC-Q100-011 VESD(CDM) -500 500 V
(CDM), R= 1Ω chip level
ESD CDM protection at edge pins AEC-Q100-011 VESD(CDM),C -750 750 V
(CDM), R= 1Ω chip level
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
6 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
4 Recommended Operating Conditions
Table 4-1: Recommended Operating Conditions
No. Description Condition Symbol Min Typ Max Unit
1 Supply voltage pin VDDA VDDA 3.1 3.3 3.5 V
2 Supply voltage pin VDDD VDDD 3.1 3.3 3.5 V
3 Difference between supply voltages VDDA VDELTA,VDDx -0.3 0 0.3 V
and VDDD
4 Current into any ALS pin IALSx 1n - 1m A
5 Current into pin RS IRS 1n - 1m A
6 Junction temperature TJ -40 25 125 °C
7 Ambient operating temperature TAMB -40 105 °C
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
7 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
5 Electrical Characteristics
(VVDDx = 3.1V to 3.5V, Tamb=-40°C to + 105°C, unless otherwise noted. Typical values are at VVDDx=3.3V and
Tamb=+25°C. Positive currents flow into the device pins.)
5.1 Overview
Table 5.1-1: Electrical Parameters Supply
No. Description Condition Symbol Min Typ Max Unit
1 Current consumption of pin VDDA MODE[7:0] = 0x60, IVDD,LOOP 4.0 4.7 5.4 mA
and VDDD at typical mode (rain AUTOM_CFG[7:0] = 0x0F,
and automatic ambient light RSI_CFG1[7:0] = 0x00
measurement mode)1) RSI_CFG2[7:0] = 0x88,
VDDA = VDDD = 3.3V,
no photo diode current,
LEDs are connected and
supplied,
no communication
2 Current consumption at pin VDDA VDDA = VDDD = 3.3V IVDD,SM 5 8 11 µA
and VDDD in sleep mode
1)
The photo current of photo diodes increases the current consumption of IVDD,LOOP. Additional current consumption of pins LEDA and LEDB must
be considered.
5.2 Supply Monitor
Table 5.2-1: Electrical Parameters of Supply Monitor
No. Description Condition Symbol Min Typ Max Unit
1 VDDA voltage threshold to set VDDA rising VPOK,VDDA,RISE 2.75 2.9 3.05 V
MON_C_VDDA comparator output from edge
low to high
2 VDDA voltage threshold to set VDDA falling VPOK,VDDA,FALL 2.7 2.85 3.0 V
MON_C_VDDA comparator output from edge
high to low
3 VDDD voltage threshold to set VDDD rising VPOK,VDDD,RISE 2.60 2.8 3.0 V
MON_C_VDDD comparator output from edge
low to high1)
4 VDDD voltage threshold to set VDDD falling VPOK,VDDD,FALL 2.5 2.67 2.85 V
MON_C_VDDD comparator output from edge
high to low1)
5 VDDA overvoltage threshold VDDA rising and VOV,VDDA 3.55 3.85 4.15 V
falling edge
6 Diagnosis Voltage of VDDA measured with VDDA=3.3V; VDIAG,VDDA,ADC 403 426 449 LSB
internal ADC VDDD=3.3V
7 Diagnosis Voltage of VDDD measured with VDDA=3.3V; VDIAG,VDDD,ADC 397 421 445 LSB
internal ADC VDDD=3.3V
1)
measured with VDDA = VDDD ramp
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
8 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
5.3 References
Table 5.3-1: Electrical Parameters of References
No. Description Condition Symbol Min Typ Max Unit
1 Internally generated reference voltage at VREF 1.288 1.388 1.488 V
pin VREF
2 Guaranteed current range supplied by pin IVREF -3 - 0.2 mA
VREF*)
3 Current into pin VREF in case of VREF IVREF,SC,GND -25 -16.3 - mA
shorted to GND
4 Current into pin VREF in case of VREF IVREF,SC,VDD - 0.8 2 mA
shorted to VDDx
5 Internally generated reference voltage for VREF,ADC 2.300 2.420 2.500 V
ADC
*)
Not tested in production
5.4 Temperature Sensor
Table 5.4-1: Electrical Parameters of Temperature Sensor
No. Description Condition Symbol Min Typ Max Unit
1 With ADC measured output voltage of tem- VTEMP,25,ADC 535 577 620 LSB
perature sensor at 25°C
2 With ADC measured output voltage of tem- VTEMP,125,ADC 373 416 458 LSB
perature sensor at 125°C
3 With ADC measured slope of temperature SLOPEVTEMP,ADC -1.87 -1.57 -1.32 LSB/K
sensor output voltage over absolute tem-
perature*)
4 Overtemperature threshold at which the TTHR,OVERTEMP 125 135 145 °C
chip goes into overtemperature mode*) 1)
*)
Not tested in production
1)
The overtemperature condition is measured with the internal temperature sensor, i.e. with the junction temperature
5.5 Oscillator
Table 5.5-1: Electrical Parameters of Oscillator
No. Description Condition Symbol Min Typ Max Unit
1 Trimmed clk frequency FCLK,TRIM 7.2 8 8.8 MHz
2 Number of trimming positions for FCLK*) NOSC,PROG - 32 -
3 Default untrimmed clk frequency during FCLK,DEF - 6.2 8 MHz
start up or an uncorrectable ECC error of
trim section
*)
Not tested in production
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
9 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
5.6 Ambient Light Interface (ALI)
Table 5.6-1: Electrical Parameters of ALI
No. Description Condition Symbol Min Typ Max Unit
1 Valid input range of ALI photo current1) IPHOTO,ILO,GLO 1n - 300u A
2 Gain of ALI amplifier stage Temp >= 25° GALI,LO 3.7 4 4.3 V/V
3 Lower reference current for ALI IREF,ALI,LO 0.296 0.333 0.374 µA
4 Higher reference current for ALI IREF,ALI,HI 32 36 40 µA
5 RatioREF 100 108 116 A/A
6 Offset voltage of ALI OP1 VOP1,OS -9 - 9 mV
7 output related offset voltages of VINC=b0 VALI,OS -55 - 55 mV
both OPs (including VOP1,OS)
8 Systematic offset voltage which can be INC=b1 VINC 20 30 45 mV
added to the inverting input of OP1
9 Difference of ALI output voltage between VINC,OS,ADC = VINC,OS,ADC 10 15 23 LSB
activated VINC and deactivated VINC at VALI,OUT(INC=b1) -
constant input current measured with VALI,OUT(INC=b0),
ADC IPHOTO= 9µA
10 Diagnose voltage for IREF,ALI,LO measured CALI=b1 VDIAG,ALI,LO,ADC 228 354 479 LSB
with ADC
11 Diagnose voltage for IREF,ALI,HI measured CALI=b0 VDIAG,ALI,HI,ADC 249 375 541 LSB
with ADC
12 Tolerance of VDIAG,ALI,LO, ADC*) TOLVDIAG,ALI,LO -0.05 - 0.05 LSB/LSB
13 Tolerance of VDIAG,ALI,HI,ADC*) TOLVDIAG,ALI,HI -0.05 - 0.05 LSB/LSB
14 Measured current at IPHOTO =1nA, known IPHOTO=1nA, IMEAS,1n 0.5 - 1.5 nA
temperature and Vref, without leakage and Temp < 125°
without further calibration*)
15 Measured current at IPHOTO =1µA, known IPHOTO=1µA, IMEAS,1u 0.5 - 1.5 µA
temperature and Vref and without further Temp < 125°
calibration
16 Measured current at IPHOTO =300µA, IPHOTO=300µA, IMEAS,300u 180 - 440 µA
known temperature and Vref and without Temp < 125°
further calibration
17 Leakage current into any ALSx pin Temp < 125° ILEAK,ALSX -5 - 2 nA
18 Leakage current into RS pin Temp < 125° ILEAK,RS -5 - 2 nA
19 Settling time of ALI output voltage*) IPHOTO from tALI,VALID - - 13.1 ms
300µA to 1nA,
leakage << 1nA
20 Time between measurement of two con- tALI,AUTOM - 1 - ms
secutive AUTOMODE ALS measure-
ments*) 2)
21 Settling timeout of ALS AUTOMODE tALI,TIMEOUT - 15 - ms
measurement when condition of settling
control is not fulfilled (see LOG_EPS
register)*) 2)
*)
Not tested in production
1)
production test only with 10nA and 300µA
2)
based on FCLK,TRIM=8MHZ
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
10 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
5.7 Rain Sensor Interface (RSI)
Table 5.7-1: Electrical Parameters of RSI
No. Description Condition Symbol Min Typ Max Unit
1 Minimum adjustable gain of RSI RSIGAIN[7:4] = 0x0, GRSI,LO 95.2 99 101.7 dBΩ
RUNRSI=b1
2 Maximum adjustable gain of RSI RSIGAIN[7:4] = 0xF, GRSI,HI 137.2 141 143.7 dBΩ
RUNRSI=b1
3 Step width of RSI gain setting GRSI,STEP 1.8 2.8 4 dBΩ
4 Number of trimming positions for NGRSI - 16 - -
gain of RSI*)
5 Modulator frequency of RSI*) 1) FREQ_SHIFT[2:0] = b000 fRSI,MOD 90 100 110 kHz
6 Modulator frequency of RSI with FREQ_SHIFT[2:0] = b111 fRSI,MOD,LO 76.60 85.11 93.62 kHz
max. frequency shift*) 1)
*)
Not tested in production
1)
Min/max limits are derived from FCLK,TRIM
5.8 LED Driver
Table 5.8-1: Electrical Parameters of LED Driver
No. Description Condition Symbol Min Typ Max Unit
1 Minimal selectable on-current of pins IW_LEDB[7:4] = 0x0, ILEDx,MIN 0.7 2.5 4.3 mA
LEDA and LEDB IW_LEDA[3:0] = 0x0,
ILEDx,MIN = ILEDx,measured - ILEDx,LOW
2 Maximal selectable on-current of IW_LEDB[7:4] = 0xf, ILEDx,MAX 32.8 40 47.2 mA
pins LEDA and LEDB IW_LEDA[3:0] = 0xf,
ILEDx,MAX = ILEDx,measured - ILEDx,LOW
3 On-current step size of pins LEDA ILEDx,STEP 1.8 2.5 3.3 mA
and LEDB
4 Number of trimming positions of NLEDx,STEPS - 16 -
ILEDx*)
5 Voltage at pins LEDA and LEDB*) VLEDx 0.8 - 18 V
6 Maximum power dissipation at pin PLEDx = VLEDx * ILEDx PLEDx - - 0.71 W
LEDA or LEDB*) 1)
7 Calibrated current slew rate of pins measured between 20% and ILEDx,SLEW 40 - 110 mA/µs
LEDA and LEDB 80% of ILEDx
8 Calibrated idle current flowing into ILEDx,LOW 100 400 1000 µA
pins LEDx while driver is in off-state
*)
Not tested in production
1)
The customer has to make sure to choose a maximum ILEDx according to the voltage drop VLEDx at the pins LEDA and LEDB so that PLEDx does
not exceeded this maximum. DEpending on ambient temperature and PCB connection it is possible that the device will heat up to much and
enter the over-temperature mode. The worst case duty cycle for the pulsed LED current is 50%.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
11 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
5.9 Digital Control
Table 5.9-1: Electrical Parameters of Digital Control
No. Description Condition Symbol Min Typ Max Unit
1 Min. low time of CSB input to wake- tWAKEUP - - 75 us
up from sleep mode. For an always
safe wake-up the CSB low time
should be over the specified max.
value.*)
*)
Not tested in production
5.10 Digital Signal Processing
Table 5.10-1: Electrical Parameters of Digital Signal Processing
No. Description Condition Symbol Min Typ Max Unit
1 WS output level low with normal drive SELDRV = b1, VOL(WS) - - 0.1 VDDD
capability IOL(WS) < 2 mA
2 WS output level low with less drive SELDRV = b0, VOL,L(WS) - - 0.1 VDDD
capability IOL,L(WS) < 0.4 mA
3 WS output level high with normal SELDRV = b1, VOH(WS) 0.9 - - VDDD
drive capability IOH(WS) > -2 mA
4 WS output level high with less drive SELDRV = b0, VOH,L(WS) 0.9 - - VDDD
capability IOH,L(WS) > -0.4 mA
5 WS pull-down resistor VIN(WS) = VDDD = 3.3V, RPD(WS) 70 115 180 kΩ
RPD(WS) = VIN(WS) / IIN(WS)
6 WS output pulse width when data WSFCT[2:0]=b001 or tDAV_PULSE 7.5 1/FCLK,T
available signals(DAV) are mut- WSFCT[2:0]=b100 or RIM
liplexed out by WSFCT selection. WSFCT[2:0]=b101 or
MISO output pulse width when bit- WSFCT[2:0]=b110
stream available signal(BSAV) is
multiplexed out by WSFCT selection
b011.*)
*)
Not tested in production
5.10.1 Rain sensor data processing
Table 5.10.1-1: Electrical Parameters of Rain Sensor Data Processing
No. Description Condition Symbol Min Typ Max Unit
1 -3dB frequency of digital low pass FREQ_SHIFT[2:0] = b000 fRSI,LP 153 170 187 Hz
filter of RSI1)
2 -3dB frequency of digital high pass FREQ_SHIFT[2:0] = b000 fRSI,HP 4.5 5 5.5 Hz
filter of RSI1)
3 frequency of RSI data available pulse FREQ_SHIFT[2:0] = b000 fRSI,DAV 1406.3 1562.5 1718.8 Hz
at pin WS1) WSFCT[2:0] = b100,
1)
value is proportional to modulator frequency of RSI
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
12 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
5.11 Serial Peripheral Interface (SPI)
Table 5.11-1: Electrical Parameters of SPI
No. Description Condition Symbol Min Typ Max Unit
1 CSB, SCLK, MOSI input high to low VIL(SPI) 0.3 - - VDDD
threshold
2 CSB, SCLK, MOSI input low to high VIH(SPI) - - 0.7 VDDD
threshold
3 MISO output level low with normal drive SELDRV = b1, VOL(SPI) - - 0.1 VDDD
capability IOL(SPI) < 2 mA
4 MISO output level low with less drive SELDRV = b0, VOL,L(SPI) - - 0.1 VDDD
capability IOL,L(SPI) < 0.4 mA
5 MISO output level high with normal drive SELDRV = b1, VOH(SPI) 0.9 - - VDDD
capability IOH(SPI) > -2 mA
6 MISO output level high with less drive SELDRV = b0, VOH,L(SPI) 0.9 - - VDDD
capability IOH,L(SPI) > -0.4 mA
7 SCLK, MOSI pull-down resistor VIN(SPI) = VDDD = 3.3V, RPD(SPI) 70 115 180 kΩ
RPD(SPI) = VIN(SPI) / IIN(SPI)
8 CSB pull-up resistor VIN(SPI) = 0V, RPU(SPI) 70 125 180 kΩ
VDDD = 3.3V,
RPD(SPI) = VDDD / -IIN(SPI)
9 SPI clock frequency CLOAD,MISO ≤ 50pF fSCLK = 1 / - - 1 MHz
tSCLK,HIGH ≥ 450ns tC(SCLK)
10 MOSI setup time*) 1) tSU(MOSIV) 20 - - ns
11 CSB to MISO time*) 1) tEN(CSBL-MISOV) - - 225 ns
12 SCLK to MISO time*) 1) tA(SCLK-MISOV) - - 80 ns
13 Time between two SPI frames*) 1) tW(CSBH) 1 - - µs
14 Maximum allowed time between two tTO(SPI) - - 1 ms
SCLK edges*)
*)
Not tested in production
1)
Also valid when the CSB pin is tied to zero.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
13 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
6 Functional Description
6.1 Overview
VREF
Voltage LEDA
References
Clk GNDL
Gen.
LEDB
Signal
processing WS
RS TIA ∫dt
-1/+1
MISO
ALS0
MUX
ALS1 Control MOSI
Log ADC SPI
ALS2 Logic SCLK
ALS3 CSB
Figure 6.1-1: Simplified functional diagram
The purpose of the Rain Sensor Module is to control an optical sensor unit for rain detection and ambient light
measurement. The signal flow is displayed in a simplified functional diagram (6.1-1).
6.1.1 Rain Sensor Interface
The basic principle is a balancing of the light of two led channels (LEDA and LEDB) which are received by one
photo diode. Both sending channels send out light pulses triggered by a fixed clock and they are driven by the
same current.
The photo current will be integrated and compared with a reference signal (Vref). Both channels do not sent the
pulses simultaneously. It depends on the value of the integrated voltage. If it is greater than the reference voltage
channel LEDB will send, which cause a down integration. When it is lower than reference voltage LEDA will send,
which cause an up integration. That will continue until it comes to a steady state in which the integrated voltage
value is toggling around the reference value.
Clock
LEDA
Photo Diode
LEDB
Comparator
glass
Integrator
Vref
Figure 6.1.1-1: Principal signals without water drops
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
14 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Rain drops will disturb the balance due to the reflection change of the surface. The reflected light of one channel
will decrease and new equilibrium has to be found.
Clock
LEDA
Photo Diode
LEDB
Comparator
glass
Integrator
Vref
Figure 6.1.1-2: Principal signals with water drops
The input amplifier amplifies the photo current and eliminates the DC current part of the photo current, thus the
ambient light.
The demodulator blanks out one half of the mirrored input signal. The sign block determines the sign of the current
input signal which has to be added in the integrator module. The comparator compares the integrated input signal
with the reference voltage and delivers at his output the bit stream. The bit stream is averaged with a digital low
pass filter.
The averaged bit stream value is a function of LEDA and LEDB damping. If the photo diode receive the light from
both LEDs with the same strength the averaged bit stream value is 0.5. If the light from LEDB is damped by a water
drop and the light from LEDA not, the averaged bit stream value goes below 0.5. If the light from LEDA is damped
by water drop and the light from LEDB not, the averaged bit stream value goes above 0.5.
Am more detailed description of the rain sensor interface can be found in chapter 6.7 and 6.10.1.
6.1.2 Ambient Light Interface
For ambient light measurement the Ambient Light Interface (ALI) provides 4+1 channels to read out the current
from photo diodes. With a multiplexer the channel is selected. The selected photo current is amplified by a logar-
ithmic amplifier with selectable gain and converted to a voltage. This voltage is sampled with an ADC and the digit-
ized value is optional averaged over several samples. In chapters 6.6 and 6.10.2, the ambient light measurement is
described in detail.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
15 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
6.2 Supply Monitor
VDDA VDDD
Supply Monitor
POR_VDDD
NPOR NPOR
VBG
POK_VDDA SLEEP_MODE
+
+ OK
POK_VDDA
-
POK_VDDD
+
+ OK
POK_VDDD
-
OV_VDDA
+
OV
-
OV_VDDA
VDIAG,VDDD
VDIAG,VDDA
Figure 6.2-1: Block Diagram of Supply Monitor and Reset Generation
The supply monitor supervises the external supply voltages VDDA and VDDD:
• In case any supply voltage is lower than expected, reset will be generated
• If VDDA is higher than expected over voltage will be detected
Reset generation
Both supply voltages are compared with a reference voltage.
Comparators POR_VDDD use a reference voltage related to the threshold voltage of the implemented MOS tran-
sistors. Thus this reference varies over temperature and process parameters.
Comparators POK_VDDx use a constant reference voltage derived from the bandgap reference.
In order to avoid toggling of the reset signal all comparators contain a hysteresis.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
16 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
During start-up it is possible, that POK_VDDD is released early, when VDDA < VDDD so that the bandgap voltage
is not ready yet. Since POK_VDDA and POK_VDDD are combined reset sources and POK_VDDA is not released
in this condition, this poses no problem.
In sleep mode the clock of the digital part is switched off. Thus the requirements concerning the supply voltage
decrease as there are no timing constrains. Supply voltage has to be sufficiently high to ensure that all registers
keep their value. This can be guaranteed with the comparator POR_VDDD. So in sleep mode the output signals of
comparators POK_VDDx are not taken into account for reset generation. Thus these comparators are switched off
in sleep mode in order to reduce current consumption.
Over voltage detection
As both supply voltages are generated externally by a single voltage regulator, it is sufficient to check only one sup-
ply against over voltage. As shown in 6.2-1 VDDA is compared to VOV,VDDA with comparator OV_VDDA. When
VDDA rises over threshold VOV,VDDA the OVER_VOLTAGE flag is set in register STATUS and the ERROR flag in all
result register is set.
In order to reduce current consumption in sleep mode, the comparator OV_VDDA is switched of and it's output is
disabled. Over voltage will not be detected in sleep mode.
Diagnosis
For diagnosis purpose, the supply voltages can be measured by VDIAG,VDDA (measurement channel 10) and VDIAG,VDDD
(measurement channel 11) via internal ADC. These diagnosis voltages are not available in sleep mode.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
17 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
6.2.1 Power-up and -down Timing Diagram
VDDA
VDDD
VBG
NPOR
POK_VDDA
POK_VDDD
BG_OK
CLK
1 23 4 56 7
Figure 6.2.1-1: Power Timing Diagram
During power-ramp up, several cells ensure a clean start-up of the circuitry. First the POR_VDDD comparator holds
the whole system in reset until a VDDD crosses the combined threshold voltage of the used MOSFETs (1). At this
point, the bandgap-reference is working well enough to generate a stable BG_OK signal. When VBG is stable,
BG_OK rises (2) which is ANDed with the supply monitor comparators POK_VDDx, since their thresholds are refer-
enced from VBG. BG_OK also enables the oscillator. Only when POK_VDDD and POK_VDDA are also high, the
system is released from its reset-state (3).
When the power falls below the power comparator threshold VPOK,VDDA,FALL (4) or VPOK,VDDD,FALL (5) respectively, the
system is reset until power rises again. If power falls further the bandgap reference cell signals insufficient power
by setting BG_OK to 0 (6), which also stops the oscillator. Finally (7) the NPOR signal ensures the reset when all
other analog circuitry cannot work due to low power supply voltage.
During sleep mode the bandgap reference and the oscillator are switched off. Since their reference is missing, the
POK_VDDx comparators are also powered-down. The only power monitor remaining is the POR_VDDD compar-
ator to ensure information stored in registers is kept. If the device exits the sleep mode due to SPI activity and
VDDD or VDDA are below their thresholds, the device is reset as soon BG_OK signal rises.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
18 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
6.3 References
VDDA VDDA
vbg
Bandgap iptat Current
Reference Reference iconst
bg_ok
VDDA
vbg +
VREF
-
CVREF
VDDA
vbg +
vref_adc
-
Figure 6.3-1: Block Diagram of References
Function of this block is the generation of reference voltages and currents:
• VREF
• VREF,ADC
• reference and bias currents for other blocks
VREF
The internally generated voltage VREF is the output at pin VREF. VREF is intended as reference for external photo
diodes and the corresponding interface, Rain Sensor Interface and the Ambient Light Interface.
The guaranteed output current range of pin VREF is defined by parameter IVREF.
In case of an external short circuit of pin VREF to VDDx or GNDx the current is limited to IVREF,SC,VDD and IVREF,SC,GND
respectively.
The external decoupling capacitor CVREF should be placed as close as possible to the IC pins VREF and AGND.
For diagnosis purpose VREF can be measured by the internal ADC with measurement channel 7.
At idle and sleep mode VREF generation is switched off.
VREF,ADC
VREF,ADC is the internal upper reference voltage for the internal ADC. At idle and sleep mode VREF,ADC generation is
switched off.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
19 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
6.4 Temperature Sensor
TEMPERATURE SENSOR
IREF,VTEMP
ON / OFF
VTEMP
GND
Figure 6.4-1: Block Diagram of Temperature Sensor
Functionality of the temperature sensor is to output the temperature dependent voltage VTEMP. VTEMP is realised by
supplying two NPN transistor diodes with the current IREF,VTEMP .
At room temperature (25°C) VTEMP is in the range defined by VTEMP,25. The slope of VTEMP over temperature is given
by SLOPEVTEMP.
VTEMP can be passed to the ADC via the ADC multiplexer (measurement channel 6). VTEMP is automatically meas-
ured during an automatic ALI measurement, a burst measurement, RSI measurement, overtemperature mode and
when the LED drivers are switched on for coupling factor measurement.
The Temperature sensor is switched on and off according to the actual IC operating mode in order to reduce cur-
rent consumption in modes, where a temperature measurement is not needed.
6.5 Oscillator
OSCILLATOR
ICONST
FOSC[4:0] CLK
programmable
ON / OFF
Figure 6.5-1: Block Diagram of Oscillator
The oscillator generates the system clock CLK for the Digital Control block. The frequency FCLK,TRIM is defined by:
• internal reference current ICONST
• TRIM Register bits FOSC
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
20 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
During start up of the IC or an uncorrectable ECC error of the trim section, the register bits FOSC contain default
data, the corresponding CLK frequency is according to parameter FCLK,DEF.
After start up the calibrated OSC value is readout from OTP and written to register bits FOSC. The corresponding
CLK frequency is than according to parameter FCLK,TRIM.
The oscillator is switched off only during sleep mode in order to reduce current consumption where CLK is not
needed. During start up the oscillator is switched on.
6.6 Ambient Light Interface (ALI)
SEL_CAL Bits of
CALIBRATION MEASURE
register SPI Command
ICAL IREF
To ADC
VIREF
ALS3 RDIAG
PD3
VCONV VALI,OS
+ VALI,OUT
VOP1,OS
IPHOTO
- To ADC
ALS0 -
PD0 +
VINC VCOMP
VREF
PDRS
RS To RSI AMBIENT LIGHT INTERFACE
MEASURE INC bit of
SPI Command DEV_CFG
register
Figure 6.6-1: Block Diagram of ALI
The ambient light interface (ALI) is intended to convert the current of an external photo diode into a voltage.
This functionality is realized by three functional units:
• input multiplexer
• logarithmic current to voltage converter
• amplifier stage
Input Multiplexer
The input multiplexer of the ALI block is controlled by the internal state machine. According to the chosen channel
setting, the current of the external photo diodes, connected to any ALSx or RS pin, is passed via the multiplexer to
the input of the logarithmic converter. Any not selected ALSx or RS pins are shorted to VREF. If a RSI measure-
ment is selected, the current into pin RS is passed to the rain sensor interface.
In Idle Mode and Sleep Mode all ALS ans RS pins are shorted to VREF and VREF is not regulated (high ohmic). In
Idle Mode VREF is pulled to supply VDDA by a weak current.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
21 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Logarithmic Converter
The input current IPHOTO is logarithmically converted into a voltage VCONV. Valid input current range of IPHOTO depend-
ing on IREF and amplifier gain is given by parameter IPHOTO,ILO,GLO.
VINC
For diagnosis purpose an additional systematic offset VINC can be added to the positive input of the logarithmic OP
by setting INC bit via DEV_CFG register. This function is described in subchapter 6.6.3.1.
VCOMP
To avoid an amplification of VINC by the amplifier, the compensating voltage source VCOMP is
implemented. VCOMP is activated and deactivated together with VINC. Thus activating VINC increases
VALI,OUT by VINC only and not by VINC multiplied by the amplifier gain GALI,LO. Obviously a mismatch between VINC and
VCOMP is amplified.
VALI,OS
6.6-1 shows a voltage source VALI,OS. This voltage represents the output related offset voltages of
both OPs (including VOP1,OS) and in case VINC is activated, additionally the mismatch between VINC and VCOMP.
Current Diagnosis
For diagnosis the reference and calibration current can be passed to an internal resistor RDIAG and can be meas-
ured via ADC. This function is described in subchapter 6.6.3.2.
Amplifier Stage
In order to use the full input range of the connected ADC, VCONV is amplified by the second OP to an appropriate
range.
The ALI output voltage VALI,OUT dependent on photo diode current IPHOTO can be calculated as follows:
The parameter VREF is specified in 5.3-1. VINC, VALI,OS and GALI (as GALI,LO) are specified in 5.6-1. If the systematic off-
set VINC is deactivated, the parameter VINC is zero and can be omitted.
The term k T/q is the thermal voltage and consists of the Boltzmann constant k = 1.381 10-23 Ws/K, the absolute
temperature T in Kelvin and the elementary charge q = 1.602 10-19 As.
The ALI reference current IREF is specified in 5.6-1 as parameter IREF,ALI,LO.
As the input current IPHOTO has to charge several parasitic capacities, a valid measurement can take up to a time of
tALI,VAL.
Calibration
The equation for the ALI output voltage VALI,OUT contains several not precisely specified parameters and depends on
the temperature. For accurate light measurement the system should be calibrated during an end of line test and fre-
quently during operation in order to cancel temperature effects. For that reason it is possible to measure the
internal calibration current ICAL instead of the photo current IPHOTO via a multiplexer. The calibration procedure is
described in subchapter 6.6.2.
6.6.1 Deviations from logarithmic transfer characteristic
So far the transfer characteristic from input current IPHOTO to the measured output value is described by an ideal log-
arithmic behaviour. But there are deviations from this ideal characteristic:
• For low input currents: ESD protection and Input Multiplexer circuitry cause leakage currents. These leakage
currents are added to photo diode current IPHOTO of the photo diode selected for measurement. Thus the meas-
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
22 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
ured current is the sum of both. Positive leakage currents are defined as currents flowing into the pad which
increases the measured value of IPHOTO , negative leakage currents decrease the measured value as depicted in
6.6.1-1.
Leakage currents are strongly dependent on temperature, thus the leakage currents are rising almost exponentially
at high temperatures. The leakage current is specified over the full temperature range by parameters ILEAK,ALSX and
ILEAK,RS.
Measured current
[log scale]
IMEAS,LEAK_POS
IMEAS,NOLEAK Transfer Characteristic with positive leakage current
IMEAS,LEAK_NEG Transfer Characteristic without leakage current
Transfer Characteristic with negative leakage current
Input current IPHOTO
[log scale]
Figure 6.6.1-1: Deviations for low input currents
• For high input currents: The current to voltage characteristic of the Log-converter diodes is not ideal logarithmic
(e.g. due to intrinsic line resistance). Therefore the measured current value is greater than the real input current
IPHOTO. This deviation increase with increasing input current IPHOTO and increasing temperature. So the impact of
this deviation can be seen for example on the parameter IMEAS,300u. For currents below 30µA there is no relevant
effect on measured value.
Measured current
[log scale]
Current Deviation
Transfer Characteristic with ideal diodes
Transfer Characteristic with real diodes
Input current IPHOTO
[log scale]
Figure 6.6.1-2: Deviations for high input currents
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
23 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
6.6.2 Calibration
For accurate light measurement the system should be calibrated. The calibration procedure for ALI measurements
has to be divided into two categories:
• cyclic calibration during operation of the device
• calibration during end of line test of module
In chapter 6.6 the following relations between the photo current IPHOTO and the ALI output voltage VALI,OUT are given:
Solving these equations for IPHOTO:
But the application is intended to measure the ambient light and not IPHOTO. So two other characteristics of the ambi-
ent light sensor must be considered in order to get the relation between ambient light and the measured value:
A) the optical path from ambient light to the illuminance of the photo diode and
B) the transfer characteristic of the connected photo diode (illuminance to photo current)
Simplifying both, A and B, to a linear relation, the influence can be described by adding a constant of proportional-
ity. Describing the ambient light by an illuminance ILAL and adding a constant of proportionality CO,PD for the optical
path and the photo diode, the above given equations result in:
These equations show, that IREF and CO,PD can be merged to CO,PD,IREF. Additionally this has the advantage that the
internal ALI reference current IREF, which varies slightly from chip to chip, is also calibrated. This results in:
The voltages VREF, VINC, VALI,OS and the gain coefficient can be extracted by calibration measurements
during operation and of course also during the modules end of line test.
The constant of proportionality CO,PD,IREF has to be extracted by a calibration during end of line test of the module at
a defined illuminance.
Remark: Instead of converting the measured ALI ADC integer values into voltages it is also possible to directly use
the measured ADC integer values for all voltages in calibration formulas.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
24 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Relative ALI Measurement Error vs. ALI Input Current
70
60 rel. ALI Error without
calibration [%]
50
rel. ALI Error with calibration
during operation [%]
40
rel. ALI measurement error [%]
rel. ALI Error with calibration
30 during operation and end of
line test [%]
20
10
-10
-20
-30
1E-10 1E-9 1E-8 1E-7 1E-6 1E-5 1E-4 1E-3
ALI input current [A]
Figure 6.6.2-1: Example for ALI measurement error with and without calibration
In 6.6.2-1 the effect of calibration is depicted. A random sample was measured at room temperature. The ALI cur-
rent was injected into an ALS pin with a SMU with about 2000 current steps. About 1000 measurements per current
step were done in burst mode and then averaged. For the ALI measurement value calculation without calibration
the diagnosis ADC measurement value of VREF (measurement channel 7) and the internal temperature ADC meas-
urement value were used. The relative ALI measurement error is the percentage error of the calculated ALI meas-
urement value to the injected ALI current value.
6.6.2.1 Calibration during operation: VREF, VINC, VALI,OS
The sum of VREF, VALI,OS and VINC might also have a slight variation over operating conditions. The actual value can
be determined by calibration measurements during operation. The term VREF + VINC + VALI,OS can be extracted by two
complementary calibration measurements CMA and CMB.
For the calibration measurement CMA the photo current IPHOTO as ALI input current will be replaced by internal calib-
ration current ICAL (like the gain coefficient calibration measurement described in chapter 6.6.2.2). This is done with
a multiplexer.
For the complementary calibration measurement CMB the ALI reference current IREF and the internal calibration
current ICAL are interchanged in comparison to CMA. This is also realized with a multiplexer. The corresponding ALI
output voltages are VALI,OUT,CMA and VALI,OUT,CMB:
Adding up both equations and a following division by 2:
For the CMA measurement the channel 5 (ICAL) has to be measured.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
25 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
For the CMB measurement the CALI bit in the CALIBRATION register must be set and the channel 5 (ICAL) has to
be measured.
It should be noted that for activated and deactivated systematic offset VINC a separate calibration is necessary
because VINC is zero when systematic offset is deactivated and VALI,OS may differ for the two VINC settings.
6.6.2.2 Calibration during operation: gain coefficient
The gain coefficient is proportional to absolute temperature. The actual value can be determined by a
calibration measurement during operation.
Selecting a calibration measurement will replace the photo current IPHOTO as ALI input current with an internal calib-
ration current through a multiplexer (like the calibration measurement CMA described in chapter 6.6.2.1). For such
measurement the channel 5 (ICAL) has to be measured. The ALI input current during the calibration measurement
will be called ICAL and the related ALI output voltage VALI,OUT(ICAL). Thus the equations given above can be written as:
And solved for the linear coefficient:
The ALI reference current IREF is specified in 5.6-1 as parameter IREF,ALI,LO. The calibration current ICAL is specified in
5.6-1 as parameter IREF,ALI,HI. The current ratio IREF/ICAL has less variance from chip to chip as IREF or ICAL as individual
currents. Therefore, the current ratio IREF/ICAL should be used for the calibration calculation, which is specified recip-
rocal (ICAL/IREF) in the 5.6-1 as parameter RatioREF.
The determination of the term VREF+VINC+VALI,OS is described in chapter 6.6.2.1. The VINC setting has no direct impact
on the gain coefficient. But it should be noted, that the gain coefficient calibration must have the same VINC setting
as the VREF+VINC+VALI,OS calibration.
6.6.2.3 Calibration during End of Line Test
The calibration during the end of line test of the module must be done at a defined illuminance. In order to extract
the constant of proportionality CO,PD,IREF the equations VALI,OUT(ILAL) from chapter 6.6.2 can be solved to CO,PD,IREF:
With the known illuminance ILAL and the calibration measurements described in chapter 6.6.2.1 and 6.6.2.2 all data
is available to calculate the constant of proportionality.
It should be noted that the VINC setting for this calibration measurement must be the same as for the
VREF+VINC+VALI,OS calibration measurement.
6.6.3 Diagnosis
6.6.3.1 Short Circuit Diagnosis
For inputs ALSx and RS an additional systematic offset VINC can be added to the positive input of the logarithmic
OP by setting the bit INC via register DEV_CFG. This functionality is implemented in order to increase the predict-
ability of ALI's output voltage VALI,OUT in case of an external short circuit between any ALSx or RS pin, selected for
ambient light measurement and any other ALSy, RS or VREF pin.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
26 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
To examine the effects of a short circuit on the output voltage VALI,OUT, the voltage VALSX of the selected input pin
ALSx or RS must be known. From 6.6-1, the voltage at the negative input of OP1 VOP1,IN,NEG can be derived as fol-
lows:
VOP1,OS is the offset voltage of the first ALI OP specified in 5.6-1. Therefore the voltage VALSX at pin ALSx or RS is:
RSW,PASS is the multiplexer switch resistance from selected ASLx or RS pin to the negative input of OP1. IPHOTOX is
the photo current of the selected input pin ALSx or RS.
The offset voltage VOS,OP1 can be negative as well as a positive. Therefore, the following statement can be made for
the voltage VALSX of the selected input pin ALSx or RS:
• If VINC is deactivated (VINC=0V) VALSX can be less or greater than VREF, depending on VOS,OP1 and IPHOTOX.
• When VINC is activated VALSX is always greater than VREF, because VINC is at least twice as large than as VOS,OP1
(specified in 5.6-1).
• An activation of VINC leads to an increase of VALSX.
For a short circuit to pin VREF which provides the voltage VREF can be concluded:
• If VALSX is less than VREF, the current into pin ALSx or RS will increase and thus VALI,OUT will decrease.
• For VALSX greater than VREF, a part of the photo current IPHOTOX will be drained into pin VREF. The current into pin
ALSx or RS will decrease and thus VALI,OUT will increase.
• An increase of VALSX leads to a decrease of the current into pin ASLx or RS and thus to an increase of VALI,OUT.
Hence a short circuit to pin VREF with activated VINC leads always to an increased VALI,OUT voltage. In contrast to
deactivated VINC where the VALI,OUT voltage can be decreased or increased. More importantly, an activation of the
voltage VINC leads to an increase of VALI,OUT.
For a short circuit to pin ALSy or RS which is not selected for light measurement the voltage VALSY of that pin must
be known:
RSW,SHORT is the multiplexer switch resistance from not selected ASLy or RS pin to the internal VREF voltage. IPHOTOY is
the photo current of the photo diode connected to the not selected ALSy or RS pin.
For a short circuit to pin ALSy or RS which is not selected for light measurement can be concluded:
• If VALSX is less than VALSY, the current into pin ALSx or RS will increase and thus VALI,OUT will decrease:
• For VALSX greater than VALSY, the current into pin ALSx or RS will decrease and thus VALI,OUT will increase:
• An increase of VALSX leads to a decrease of the current into pin ASLx or RS which is selected for light measure-
ment and thus to an increase of VALI,OUT.
By comparison to short circuit to pin VREF with a short circuit to pin ALSy or RS which is not selected for light
measurement leads not always to an increased VALI,OUT voltage when VINC is activated. But the probability is quite
high, because the resistance RSW,PASS is at least 3 times higher than the resistance RSW,SHORT. As with the short cir-
cuit to pin VREF, an activation of the voltage VINC leads to an increase of VALI,OUT.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
27 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
To recognize a short circuit the following procedure is recommended:
1. Measure the ALI ADC result value of the selected ALI channel with deactivated VINC voltage.
2. Measure the ALI ADC result value of the selected ALI channel with activated VINC voltage.
3. Calculate the difference of ALI ADC values between activated and deactivated VINC voltages.
If no short circuit to an ALSy, RS or VREF pin is present, the measured ALI ADC value difference should (accord-
ing to the VALI,OUT equation from chapter 6.6) match the specified value VINC,OS,ADC in 5.6-1. To reduce the specified
range of VINC,OS,ADC it is a good idea to measure the ALI ADC value difference of the internal ICAL current (ICAL chan-
nel 5) at the same time.
If a short circuit to an ALSy, RS or VREF pin is present, a decreased current flows into pin ALSx or RS when VINC is
activated. Therefore the measured ALI ADC value difference must (according to the VALI,OUT equation) be higher
than VINC,OS,ADC.
In practice, there is a limitation. The ALI ADC value range has a lower and upper limit, 0 and 1023 LSB. When the
measured ALI ADC value with deactivated VINC is in the range between (1023 LSB - VINC,OS,ADC) and 1023 LSB, no
firm conclusion can be drawn about a short circuit. The measured ALI ADC value difference can than not rise
above VINC,OS,ADC. This restricted detection range is not in the specified ALI measurement range IPHOTO,ILO,GLO. But it
can be that the photo current in absolute darkness is measured in this restricted detection range without short cir-
cuit.
If the measured ALI ADC value with deactivated VINC is in the restricted detection range from (1023 LSB - VINC,OS,ADC)
to 1023, the following cases may be the reason:
• Short circuit to an ALSy, RS or VREF pin and a positive voltage of the first ALI OP VOP1,OS. The ALI ADC value
than often is 1023.
• Normal ALI ADC measurement value of the selected photo diode in absolute darkness or almost absolute dark-
ness.
• An open circuit of the selected ALSx or RS pin when the ALI ADC value is 1023.
To rule out the case for the absolute darkness, it could be reviewed if more ALI channels measure similar values.
But the used input pin of the comparing channel should not be adjacent to the originally pin, because it can be
affected by the same short circuit.
Another possibility is to switch on the RSI LEDs (e.g. via register CALIBRATION) to generate some light for the RS
photo diode. If the decoupling between RSI LEDs and ALS photo diodes is not perfect, it is possible that the ALS
photo diodes get also some light from the RSI LEDs.
ALI ADC values of the lower limit are not a practical problem. Since the ALI output voltage VALI,OUT is logarithmic, the
ALI input currents in the lower limit range of the ALI ADC are very high. These input currents are far outside the
defined measurement range IPHOTO,ILO,GLO and usually do not occur in reality.
Remark: As explained above selecting VINC increases the voltage at the corresponding ALS input. Thus the connec-
ted photo diode is biased in forward direction which causes a forward current inside the diode. The photo current
will be decreased by this forward current. The forward current will increase at higher temperatures.
6.6.3.2 Current Diagnosis
For diagnosis the ALI reference and calibration current can be passed to an internal resistor RDIAG . The voltage VIREF
over the resistor RDIAG can be measured via ADC with the MEASURE command for channel VIREF (9). At the same
time an automatic ALI measurement must be active or a RSI measurement must be active with a high
ALI_FORCE_ON bit. To measure the ALI reference current IREF the bit CALI of register calibration must be one. If
bit CALI is zero the ALI calibration current ICAL is measured. The corresponding ADC measurement values for IREF
are VDIAG,ALI,LO,ADC and for ICAL VDIAG,ALI,HI,ADC, specified in 5.6-1.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
28 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
The measured diagnosis voltages depend on absolute process parameters (due to RDIAG) but show only small vari-
ation over temperature. Thus a change of reference or calibration current can be easily detected by comparing the
actual diagnosis voltage ADC value to the corresponding value VDIAG,ALI,X,CAL stored during calibration at room tem-
perature. Tolerances are given by parameters TOLVDIAG,ALI,LO (IREF) and TOLVDIAG,ALI,HI (ICAL) in 5.6-1. The tolerances
are calculated as follows:
6.7 Rain Sensor Interface (RSI)
RSIGAIN clk_demod clk_halios
rsi_on
RRSI,IU
IRS
RS RRSI,G2
- VCONV,RS RRSI,G1
SW PASS
IRS,AC - SD-stream
of ALS MUX Band Demo- Integra- Com- Flip-
PDRS + Pass dulator Sign tor parator flop
+
VREF
IRS,DC
DC-cancellation
RAIN SENSOR INTERFACE
VREF
Figure 6.7-1: Block Diagram of RSI
The Rain Sensor Interface (RSI) is intended to convert the AC current of the external photo diode connected to pin
RS into a voltage. The photo current is passed via ALS-MUX to the RSI.
This functionality is realized by following functional units:
• Current to voltage converter
• DC current cancellation
• Adjustable amplifier stage
• Bandpass filter
• Demodulator
• Sign block
• Integrator
• Comparator
• Flip-flop
Current to voltage converter
The input current IRS,AC is linearly converted into a voltage VCONV,RS.
DC current cancellation
Function of this block is to cancel the DC component IRS,DC of the input photo current IRS. Thus VCONV,RS is fed back
via an integrator and a voltage controlled current source.
Adjustable Amplifier Stage
In order to use the full input range of the connected ADC, VCONV,RS is amplified to an appropriate range. By register
RSI_CFG1.RSIGAIN, overall gain of the RSI can be set to a value between GRSI,LO and GRSI,HI in NGRSI steps of
GRSI,STEP.
Bandpass filter
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
29 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
The bandpass filter is intended to reduce noise.
Demodulator
The demodulator passes the converted input current only during the LED light pulses. The length (integration time)
and the phase delay of this conduction period to the LED current pulse is configurable by the register RSI_CFG3.
Sign block
The demodulated input signal is inverted when the LEDB is active.
Integrator
The light pulses from LEDA are integrated positive and the light pulses from LEDB are integrated negative.
Comparator
The comparator works as an 1 Bit-ADC in a SD-loop.
Flip-flop
The flip-flop synchronizes the comparator output with the Halios clock, thereby generating the Sigma-Delta stream
(SD-stream) output. The SD-stream output determines which LED is active and is also the measurement output
signal (after digital filtering).
Modulator frequency of RSI
The modulator frequency of RSI (Halios clock) can be changed in small steps with the Register RSI_CFG3. That
can be useful if an electromagnetic distortion or disturbing external light source, with the same frequency as the
modulator frequency or a multiple of it, influences the RSI measurement.
6.7.1 RSI Modes
The LED drivers LEDA and LEDB generates current pulses and the LED groups LEDA and LEDB convert these
current pulses to light pulses, which are going through the optical paths LEDA and LEDB to the RS photo diode.
The optical paths LEDA and LEDB attenuate the light pulses and the RS photo diode convert the received light
pulses back to current pulses. These received current pulses are then measured by the rain sensor interface. Thus
the purpose of the RSI is to measure the inequality of the attenuation of the two optical paths LEDA and LEDB.
Three RSI modes are available with different characteristic curves. The mode is selected with the RSI_MODE bits
of register RSI_CFG1.
For optimum measurement results, it is recommended that the RSI is modulated symmetrically. Symmetrically
means that the RSI result value (with bypasses highpass filter) is about the half (1024LSB) of the RSI result range
when no rain drops are present. Therefore the received pulses from LEDA and LEDB are equal. This happens
automatically if the attenuation of both optical paths and both LED currents are equal. In practice it is possible that
the attenuation of on optical path is different from the other path, e.g. caused by a scratch on the windshield. For
that situation it is possible to compensate the different attenuations with different selected LED currents.
In the ideal case, a water drop on the windshield weakens the light pulse received in the photo diode by decoupling
light from the windshield. However, a water drop can also lead to a coupling-in of light into the windshield by reflec-
tion at the water-air boundary layer. Then the received light pulse is amplified rather than decreased.
If it is known to which optical path the water drop has fallen, the RSI result value can be used to determine whether
the light is decoupled or coupled in. There is the following relationship:
• When the water drop on the optical path LEDA has fallen:
• RSI result value increases decoupling
• RSI result value decreases coupling in
• When the water drop on the optical path LEDB has fallen:
• RSI result value increases coupling in
• RSI result value decreases decoupling
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
30 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
6.7.1.1 RSI0 - Relative Mode
The measurement principle of the relative mode is to put it simply, that the ratio of the strength of the two received
light pulses of channels LEDA and LEDB is formed. Thus the attenuation (damping) of the received LEDA pulse to
the received LEDB is measured. Looking at it the other way round, the ratio of the attenuation of the optical paths
LEDA and LEDB can be derived.
Therefore in this mode the sensitivity of rain drop recognition is independent from the RSI gain and LED current
settings. The sensitivity is almost dependent only on the optical system. For example, a 20% lower received LEDA
to LEDB pulse generates always the same measurement result regardless of the received pulse strength.
If the RSI amplifier does not saturate, the RSI0 result range always reaches from 100% damped LEDB to LEDA
pulse (=-100% LEDA to LEDB) to 100% damped LEDA to LEDB pulse. In 6.7.1.1-1 the characteristic curve for the
RSI0 mode is shown.
Figure 6.7.1.1-1: Characteristic curve of RSI0 mode
Depicted is a simulation with ideal elements of the characteristic curve of RSI0 mode with deactivated digital high-
pass filter (BYPASS_HP=b1). The blue line is the part where the received LEDB pulse is lower than the received
LEDA pulse. The green line is the part where the received LEDA pulse is lower than the received LEDB pulse.
For example, -50% LEDA to LEDB damping means that the received LEDB pulse is attenuated by 50% compared
to the received LEDA pulse. Therefore the received LEDA pulse is twice as high as the received LEDB pulse.
At the RSI0 mode a saturation of the amplifier is not reliably recognizable by the RSI0 result values. An overdriven
signal does not necessarily generate the minimum or maximum RSI0 result value, but can produce any result
value. Hence it is important to keep the RSI amplifier out of saturation. However to get a good signal-to-noise ratio
the amplification and LED current should be as high as possible.
To get the optimal RSI gain and LED current setting it is necessary to calculate the maximum amplitude after the
RSI amplification. The calculation of the maximum amplitude is based on the following assumptions:
• Without raindrops the optical system with the two optical coupling channels LEDA and LEDB is symmetrical.
Therefore the two received photo diodes pulse currents from LEDA and LEDB are equal. The RSI0 result value
with bypassed highpass filter (RSI_CFG1.BYPASS_HP=b1) should then be the half (1024LSB) of the RSI result
range (0LSB to 2047LSB).
• If a rain drop decouples the LED light, one optical coupling channel (LEDA or LEDB) can be damped by 100% at
most. Thus the measured photo diode pulse current of this channel is also damped by the same factor. The
other optical coupling channel remains undamped. A damping of 100% of one channel leads to a RSI0 result
value of 0LSB or 2047LSB (with bypassed high-pass filter).
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
31 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
• If a rain drop couples in LED light (no total reflection), one optical coupling channel (LEDA or LEDB) can be
increased by 58% at most. Therefore the measured photo diode current of this channel is also increased by the
same factor. The other optical coupling channel remains undamped. An increase of 58% of one channel leads to
a RSI0 result value of about 600LSB or 1444LSB (with bypassed highpass filter).
With the following formula the max. amplitude after the RSI amplifier URSI0,MAX at RSI0 mode is calculated. ILED is the
selected LED current, GRSI is the selected RSI gain and KCOUPLING is the coupling factor of the optical system
(described in chapter 6.7.2).
To prevent a saturation of the RSI amplifier the allowed amplitude maximum after the amplifier URSI0,MAX,allowed at
RSI0 mode is 1,08V. Solve the equation to KCOUPLING and plug in URSI0,MAX,allowed results in:
With that formula it is possible to calculate the maximum allowed coupling factor at a given RSI gain and LED cur-
rent. The tables below helps to estimate the right RSI gain and LED current to keep the RSI amplifier out of satura-
tion. However, it should be noted that the height of the coupling-in effect is not always exactly known. This effect
depends on the optical system and can sometimes lead to high amplitudes and thus to saturation. If the possible
height of the coupling-in is not known, a two step smaller RSI gain should be selected for safety. The signal-to-
noise ratio is usually hardly affected by this.
Table 6.7.1.1-1: Max. coupling factor in dependence on RSI gain at constant LED current and RSI0 mode to get not
into saturation
W_LEDx ILED pulse [mA] RSIGAIN GRSI [dBOhm] GRSI [U/I] max. KCOUPLING max. IPHD
[LSB] [LSB] [A/A] pulse [A]
0x7 20 0x0 99.0 89125 6.06E-04 1.21E-05
0x7 20 0x1 101.8 123027 4.39E-04 8.78E-06
0x7 20 0x2 104.6 169824 3.18E-04 6.36E-06
0x7 20 0x3 107.4 234423 2.30E-04 4.61E-06
0x7 20 0x4 110.2 323594 1.67E-04 3.34E-06
0x7 20 0x5 113.0 446684 1.21E-04 2.42E-06
0x7 20 0x6 115.8 616595 8.76E-05 1.75E-06
0x7 20 0x7 118.6 851138 6.34E-05 1.27E-06
0x7 20 0x8 121.4 1174898 4.60E-05 9.19E-07
0x7 20 0x9 124.2 1621810 3.33E-05 6.66E-07
0x7 20 0xA 127.0 2238721 2.41E-05 4.82E-07
0x7 20 0xB 129.8 3090295 1.75E-05 3.49E-07
0x7 20 0xC 132.6 4265795 1.27E-05 2.53E-07
0x7 20 0xD 135.4 5888437 9.17E-06 1.83E-07
0x7 20 0xE 138.2 8128305 6.64E-06 1.33E-07
0x7 20 0xF 141.0 11220185 4.81E-06 9.63E-08
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
32 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.7.1.1-2: Max. coupling factor in dependence on LED current at constant RSI gain and RSI0 mode to get not
into saturation
W_LEDx ILED pulse [mA] RSIGAIN GRSI [dBOhm] GRSI [U/I] max. KCOUPLING max. IPHD
[LSB] [LSB] [A/A] pulse [A]
0x0 2.5 0x7 118.6 851138 5.08E-04 1.27E-06
0x1 5 0x7 118.6 851138 2.54E-04 1.27E-06
0x2 7.5 0x7 118.6 851138 1.69E-04 1.27E-06
0x3 10 0x7 118.6 851138 1.27E-04 1.27E-06
0x4 12.5 0x7 118.6 851138 1.02E-04 1.27E-06
0x5 15 0x7 118.6 851138 8.46E-05 1.27E-06
0x6 17.5 0x7 118.6 851138 7.25E-05 1.27E-06
0x7 20 0x7 118.6 851138 6.34E-05 1.27E-06
0x8 22.5 0x7 118.6 851138 5.64E-05 1.27E-06
0x9 25 0x7 118.6 851138 5.08E-05 1.27E-06
0xA 27.5 0x7 118.6 851138 4.61E-05 1.27E-06
0xB 30 0x7 118.6 851138 4.23E-05 1.27E-06
0xC 32.5 0x7 118.6 851138 3.90E-05 1.27E-06
0xD 35 0x7 118.6 851138 3.63E-05 1.27E-06
0xE 37.5 0x7 118.6 851138 3.38E-05 1.27E-06
0xF 40 0x7 118.6 851138 3.17E-05 1.27E-06
6.7.1.2 RSI1 - Differential Mode
The measurement principle of the differential RSI1 mode is, that the difference in height of the two received light
pulses of the channels LEDB and LEDA is formed. Therefore in this mode the sensitivity of rain drop recognition is
also dependent from the RSI gain and LED current settings. So it is possible to get a smaller or higher sensitivity
than the relative RSI0 mode.
With the following formula the RSI1 result value VALRSI1 can be calculated in dependence from selected RSI gain
GRSI, when the digital highpass filter is deactivated. IPHD,LEDA and IPHD,LEDB are the received LEDA and LEDB current
pulse heights.
It should be considered that typical parameter values are assumed for the formula. In 6.7.1.2-1 the characteristic
curve of RSI1 mode is shown for all RSI gain settings. It is visible that the RSI1 input range is dependent from the
RSI gain. The RSI1 curves are linear in comparison to RSI0 or RSI2 curves.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
33 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Figure 6.7.1.2-1: Characteristic curve of RSI1 mode
Depicted is a simulation with ideal elements of the characteristic curve of RSI1 mode with deactivated digital high-
pass filter (BYPASS_HP=b1) for all RSI gains. The left graph shows the lower RSI gains (0 to 7) and the right
graph the higher RSI gains (8 to 15).
In comparison to the RSI0 mode the saturation behavior of the RSI1 mode is like a normal ADC, when the high-
pass filter is bypassed (RSI_CFG1.BYPASS_HP=b1). With values between min. (0LSB) and max. (2047LSB) RSI1
result value the amplifier is not saturated. If the RSI1 result value is 0LSB or 2047LSB a saturation of the digital
RSI1 measurement range and a saturation of the RSI amplifier is possible.
It should be noted that in this mode, the current consumption of the LEDs is twice as high as in the relative RSI0
mode with the same LED current setting.
6.7.1.3 RSI2 - Alternative Relative Mode
The alternative relative mode is similar to the RSI0 mode. The differences are:
• The characteristic curve has another shape.
• The noise floor is higher.
• The LED current consumption is half as large as the RSI0 mode with the same LED current setting.
In 6.7.1.3-1 the characteristic curve for the RSI0 mode is shown.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
34 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Figure 6.7.1.3-1: Characteristic curve of RSI2 mode
Depicted is a simulation with ideal elements of the characteristic curve of RSI1 mode with deactivated digital high-
pass filter (BYPASS_HP=b1). The blue line is the part where the received LEDB pulse is lower than the received
LEDA pulse. The green line is the part where the received LEDA pulse is lower than the received LEDB pulse.
For example, -50% LEDA to LEDB damping means that the received LEDB pulse is attenuated by 50% compared
to the received LEDA pulse. Therefore the received LEDA pulse is twice as high as the received LEDB pulse.
6.7.2 Coupling Factor Measurement
The coupling factor of the optical system is one important characteristic and is necessary to calculate the max. gain
and LED current settings to get not into saturation of the RSI amplifier. The coupling factor KCOUPLING is defined as
quotient of the received photo diode current IPHD and the sent LED current ILED:
The simplest way to measure the coupling factor is to force into the LED group LEDA or LEDB a constant DC cur-
rent ILED, e.g. with a source measure unit. The emitted light from the LEDs is going through the optical system and
at the photo diode the generated current IPHD is measured. Therefore, a good ammeter is required to measure the
small photo diode current IPHD (e.g. 100nA). This measurement must be done at absolute darkness or at constant
ambient light. At constant ambient light the difference of the photo diode current must be measured between LED
current switched-on and switched-off, to cancel out unwanted photo diode current, which is generated by ambient
light.
This measurement method has several practical drawbacks. It is not easily possible to inject external current into
the LEDs and to measure the small photo diode current externally when the module is fully assembled and
attached to the optical system. Additionally a constant current source and a good ammeter are necessary. There-
fore a special mode was implemented to measure the coupling factor at fully installed state without additional
meters. In this coupling factor measurement mode it is possible to draw a constant DC current from pins LEDA and
LEDB and to measure the DC current of the RS photo diode using the ambient light interface.
The LEDA und LEDB current setting (register RSI_CFG2) for the coupling factor measurement should be the same
like in the desired RSI mode. The following example shows a possible sequence of coupling factor measurement of
the optical path LEDA with ILED = 20mA. This measurement must be made at constant ambient light:
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
35 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
1. Switch on the idle LED current ILEDx,LOW of pins LEDA and LEDB with setting bit LED_DRV of register CALIBRA-
TION to b1. The RSI must be inactive (MODE.RUNRSI=b0).
2. Measure with the ambient light interface the ADC value of the RS photo diode (channel 4: RS/ALS4). Make a
calibration during operation measurement (described in chapter 6.6.2) and calculate the RS photo diode current
IPHD,OFF at LED idle current and constant ambient light.
3. Set bits IW_LEDA of register RSI_CFG2 to 0x7 (20mA).
4. Switch on LEDA on-current ILEDx of pin LEDA with setting bit LEDA_ON of register CALIBRATION to b1.
5. Measure with the ambient light interface the ADC value of the RS photo diode. Make a calibration during opera-
tion measurement and calculate the RS photo diode current IPHD,ON at the sum of LED idle current and LEDA on-
current and at constant ambient light.
6. Switch off LEDA on-current ILEDx of pin LEDA with setting bit LEDA_ON of register CALIBRATION to b0.
7. Switch off the idle LED current ILEDx,LOW of pins LEDA and LEDB with setting bit LED_DRV of register CALIBRA-
TION to b0.
8. Calculate the difference of RS photo diode current between LEDA on-current and LED idle current:
9. Calculate the coupling factor:
The coupling factor measurement for the optical path LEDB is equivalent to LEDA. Instead of bit LEDA_ON the bit
LEDB_ON of register CALIBRATION must be set and bits IW_LEDB of register RSI_CFG2 must configured to 0x7
(20mA).
Remark 1: In reality the characteristic curves of photo diodes and LEDs are not always linear. Therefore the coup-
ling factor can be different for different LED currents. Additionally the selected LED on-current has a variation, spe-
cified in 5.8-1.
Remark 2: The LED drivers are not designed to generate a permanent high DC current. Thus the coupling factor
measurement mode should not run continuously with DC current over 20mA per LEDx pin. Note also the increase
of junction temperature when LED drivers are switched on.
6.7.3 Indirect Absolute Value Measurement
The RSI modes measure the ratio or difference of the received pulse currents. However, in some cases (e.g., dew
coating), the two optical paths LEDA and LEDB can be equally attenuated. Then, in both channels, the received
pulse currents decrease equally. Therefore, the difference of the received pulse currents remains zero and the res-
ult value does not change.
In order to cover also such cases, the absolute value of the pulse current of one channel must be measured. The
coupling factor measurement, described in chapter 6.7.2, does this with the help of the ambient light interface. In
this method, however, the ambient light must remain constant during the measurement procedure.
An alternative method of absolute value measurement or coupling factor measurement is possible with RSI Mode 1
and deactivated highpass filter (RSI_CFG1.BYPASS_HP=b1). For this purpose, the equation for the coupling factor
KCOUPLING from chapter 6.7.2 is combined with the equation for the RSI1 result value VALRSI1 from chapter 6.7.1.2:
With two measurements with different LED current settings for one LED channel, a term can be reduced after set
up a system of equations. For example, with two different LEDA currents ILEDA1, ILEDA2 and a constant LEDB current
ILEDB:
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
36 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
With the equation converted to KCOUPLING,LEDA, the coupling factor for the optical path LEDA and the absolute values
for the received pulse currents IPHD,LEDA can be calculated therefrom:
6.7.4 Phase Delay Configuration
The PHASE_DELAY value of register RSI_CFG3 configures the phase delay of the RSI integration phase. The
optimal phase delay setting depends mainly on the RS photo diode type and the RSI gain setting. It is difficult to
find out the optimal phase delay for all combinations. However, there is a possibility to determine the optimal phase
delay setting in the installed state.
For the determination it is used that, in RSI mode 1, the phase shift with asymmetrical regulation has a traceable
behavior on the RSI result value. This means that with optimal phase delay setting the RSI result value has the
highest deflection. The behavior is visible in 6.7.4-1.
The optimal phase delay configuration is for all three RSI modes equal when the same RSI gain and approximately
the same LED current setting is used. The following example shows a possible measurement sequence to determ-
ine the optimal phase delay. The RSI measurement value must remain constant during the measurement. There-
fore, the measurement must be performed at a dry windshield.
1. If RSI Mode 0 or 2 is used, switch to RSI Mode 1 (RSI_CFG1.RSI_MODE=b01).
2. Deactivate the digital highpass filter (RSI_CFG1.BYPASS_HP=b1).
3. Reduce LEDA current to get from symmetrical to asymmetrical regulation. Best is a RSI result value deflection
of about 500LSB.
4. Variate the phase delay (RSI_CFG3.PHASE_DELAY) from 0x0 to 0xF. Measure several times the RSI result
value and average it to cancel out noise. Note the settling time of the digital RSI lowpass filter (5-10ms).
5. Save the phase delay configuration value with the largest RSI result value deflection.
6. Repeat from step 3 the sequence with a decreased LEDB current.
7. Optimal phase delay configuration value is the mean of the two saved phase delay configuration values.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
37 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Averaged RSI1 value vs. phase delay Averaged RSI1 value vs. phase delay
1590 650
av eraged RSI v alue @ 3us
1570 integration time [LSB]
averaged RSI value [LSB]
averaged RSI value [LSB]
600
av eraged RSI v alue @ 2us
1550 integration time [LSB]
550
1530
1510 500
1490 av eraged RSI v alue @
3us integration time [LSB] 450
1470 av eraged RSI v alue @
2us integration time [LSB]
1450 400
0 2 4 6 8 10 12 14 16 0 2 4 6 8 10 12 14 16
phase delay value [LSB] phase delay value [LSB]
Figure 6.7.4-1: RSI1 result value as a function on phase delay setting
6.7.4-1 shows a measurement sweep with a reduced LEDA current in the diagram on the left. The RSI1 result
value is plotted as a function of the phase delay configuration. The measurements were made once with an integra-
tion time of 2µs (RSI_CFG3.SAMPLE_TIME= b1) and once with an integration time of 3µs
(RSI_CFG3.SAMPLE_TIME=b0). The optimum phase delay value is at the highest RSI1 result value and is 9LSB
for both curves.
The LEDB current was reduced in the diagram on the right. Here, the optimum phase delay value is at the lowest
RSI1 result value and is 9LSB for 2µs integration time and 10LSB for 3µs integration time.
The optimal phase delay configuration is therefore 9LSB or 10LSB and is almost independent of the integration
time setting.
6.8 LED Driver
The two LED drivers for LEDA and LEDB are NMOS current sinks with separately programmable current strength.
The current slew rate between on and off state is limited. A small idle-current is implemented which is always flow-
ing when the LED drivers are not powered-down. The programmed on-current is added to this idle-current when
the active LED channel pulses. The pulsing of each driver is controlled by the synchronized comparator output from
RSI, depending on the selected RSI mode. Additional it is possible to control the LED drivers manually with register
CALIBRATION to generate a DC LED current when RSI mode is not active (MODE.RUNRSI=b0). This can be use-
ful for the coupling factor measurement (chapter 6.7.2).
The LED drivers are designed to drive up to 4 LEDs per driver, but the maximum number of LEDs is dependent
from the LED supply voltage and the characteristics of the LEDs. It is important that the voltage at the pins LEDA
and LEDB is kept above the minimum value of VLEDx when the driver is operating. Also the power dissipation of the
LED drivers should not be neglected. It increases linear with the LEDx pin voltage and can result to a high temper-
ature rise of the device when the LED drivers are activated. A fast temperature change has also an impact on
ambient light measurement results. Counter-measures can be a good thermal coupling to the PCB and a reduction
of the LEDx pin voltage with an optional LED series resistor.
6.9 Digital Control
The device operation is controlled with a state-machine that handles user initiated and automatic measurement. A
sleep mode is also provided to reduce the power consumption of the device if no measurements are needed.
A state-diagram is given in 6.9-1.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
38 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
The state-machine consist of temporary and permanent states. A temporary state is automatically left after a
desired action is finished while a permanent state is kept until an external event enforces a state change.
The following subsections describe the relevant details of each state.
State Diagram
SLEEP RESET
CSB=0
(tWAKEUP)
Cmd SLEEP
IDLE
Measurement started
ALI/RSI or
Coupling Factor
STATUS.OVER_TEMP cleared
Measurements (allowed when TFTM < TTHR,OVERTEMP)
finished/stopped
MEASUREMENT OVER TEMP
If (TFTM > TTHR,OVERTEMP)
STATUS.OVER_TEMP = 1
MEASUREMENTS OFF
LED DRIVER OFF
Figure 6.9-1: Main state diagram
The device features a digital overtemperature protection that uses the internal temperature sensor and the ALS
ADC to monitor the device temperature and watch overtemperature conditions.
The automatic temperature monitoring (FTM = Forced Temperature Measurement) is started automatically when
the RSI or ALI measurement loops are started or when the CALIBRATION.LED_DRV bit is set. When the FTM is
running a new temperature measurement is requested every 16ms, the result is stored in the VTEMP register.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
39 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
When a request is pending, the ALS unit executes the temperature measurement at the next available time slot. If a
burst measurement is running, it is interrupted for the FTM measurement without discharging the log amplifier of
the selected ALS channel. Hence the settle time of the log amplifier is not extended by the FTM measurement.
6.9.1 Reset
After a Reset Event (Power-Up/Power-Watch/SPI Reset Command) the device reads the trim values from the OTP
and enters the IDLE state.
Table 6.9.1-1: Reset
Blocks/Function Description
Main Function After Reset: Reading the trimming values from the OTP and enter the idle state.
Analog part OFF
ALI-ADC OFF
ALI OFF
RSI-Loop OFF
LEDs OFF
Digital control No access to the registers.
All measurements are stopped.
Commands are not accepted.
Following states IDLE state
6.9.2 Idle Mode
In the IDLE state the device is ready to run but does not execute any measurement. It waits for a new command to
execute.
Table 6.9.2-1: Idle mode
Blocks/Function Description
Main Function Wait for new commands.
Analog part ON
ALI-ADC OFF
ALI OFF
RSI-Loop OFF
LEDs OFF
Digital control Full access to the registers.
All measurements are stopped.
Commands are accepted.
Following states -Manual measurement mode (triggered by the SPI Measure Command )
-Automatic measurement mode (triggered by setting the AUTOMODE bit in the Mode
register)
-Sleep Mode (triggered by the SPI Sleep Command)
6.9.3 Manual/Burst measurement mode
In this state a single measurement or a burst (ongoing repeated) measurement on a selected channel is executed.
The result(s) are written into the ADC-value register. In case of a temperature measurement the result is also writ-
ten into the VTEMP-value register.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
40 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
When a measurement is requested by the user the measurement is queued as the first measurement into the ALS
measurement queue. Hence it will become the next ALS measurement to execute. If an automatic temperature
measurement (every 16ms) is pending, it will be handled before the requested measurement anyway.
The BUSY bit in the STATUS register is set when the measurement is queued and cleared when the measurement
is finished.
When the BURSTMODE bit is set in the MODE register, the measurement is repeatedly executed on the selected
channel without any delay between two consecutive measurements. Averaging, as defined with the MEASAVG
bits, still applies. The measurements can be stopped with the STOPMEAS command via SPI or resetting the
BURSTMODE bit. Automatic temperature measurements are interspersed every 16ms.
Table 6.9.3-1: Manual/Burst measurement mode
Blocks/Function Description
Main Function Manual triggered measurement on a single ALS channel
Analog part ON
ALI-ADC ON
ALI ON when an ALI channel is selected.
RSI-Loop ON when the MODE.RUNRSI bit is set.
LEDs ON when the MODE.RUNRSI bit is set.
Digital control Read access to all result registers.
Read and write access to all configuration registers.
Following states -Idle mode (entered after the measures was finished or stopped and automatic measure-
ment mode is not active)
-Automatic measurement mode when entered from this mode due to a MEASURE com-
mand or an automatic temperature measurement
-OVER_TEMP when a overtemp condition is recognized
6.9.4 Automatic measurement mode
The automatic measurement mode consist of two (mostly) independent measurement loops. The ambient light
measurements (ALS) and the rain sensor measurements (RSI).
Both loops are configured and run independent of the other.
The ALS automeasure loop makes repeated measures of all selected channels in the AUTOM_CFG register and
updates the corresponding data value registers. Each measurement might be the average value according to the
value of the AUTOAVG bits in the AVG_CFG register.
The RSI measurement loop performs a rain sensor measurement and provides the demodulated result to the
RSIVAL register. The loop can be stopped or continued with setting or resetting the HOLDRSI bit in the MODE
register. See RSI_CFG registers for RSI measurement configuration.
To prevent overheating an automatic temperature measurement and validation is interspersed every 16 ms and the
result is stored in the VTEMP register.
Table 6.9.4-1: Automatic measurement mode
Blocks/Function Description
Main Function Make repeated measures of all selected channels and update the corresponding data value
registers. Make a temperature measurement every 16 ms and update the vtemp register.
Analog part ON
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
41 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Blocks/Function Description
ALS-ADC ON
ALI ON
RSI-Loop ON when the MODE.RUNRSI bit is set.
LEDs ON when the MODE.RUNRSI bit is set.
Digital control Read access to all result registers.
Read and write access to all configuration registers.
Following states -Idle mode (triggered by setting the RUNRSI and AUTOMODE bits in the Mode register to '0')
-Burst measurement mode (triggered by the SPI measure command )
-OVER_TEMP when a overtemp condition is recognised
6.9.5 Coupling Factor measurement mode
The coupling factor measurement mode will be entered by setting CALIBRATION.LED_DRV bit to '1'. In this mode
the RSI system can be characterized by stimulating the RSI LEDs in combination with a RSI/ALI4 channel meas-
urement.
To prevent overheating the automatic temperature measurement and validation is interspersed every 16 ms and
the result is stored in the VTEMP register.
Table 6.9.5-1: Coupling factor measurement mode
Blocks/Function Description
Main Function The function will be entered setting CALIBRATION.LED_DRV=1 (condition: RUNRSI=0)
Analog part ON
ALS-ADC ON
ALI ON when an ALI channel is selected.
RSI-Loop OFF
LEDs controlled by CALIBRATION.LEDA_ON and CALIBRATION.LEDB_ON
Digital control Read access to all result registers.
Read and write access to all configuration registers.
Following states -Idle mode (when CALIBRATION.LED_DRV=0)
-OVER_TEMP when a overtemp condition is recognised.
6.9.6 Overtemperature Mode
Overtemperature mode is entered by the device when an overtemperature condition is detected during a measure-
ment (TFTM > TTHR,OVERTEMP ). In that case the OVER_TEMP bit in the STATUS register is set. All running measure-
ments are stopped and the related hardware modules, i.e. the LED driver, are switched off (power-down).
The automatic temperature measurement is executed as long as the OVER_TEMP bit in the STATUS register is
set. The related hardware modules are kept active.
The OVER_TEMP bit in the STATUS register can be cleared if the temperature has recovered under the overtem-
perature threshold value. No further measurement requests are accepted until the the OVER_TEMP bit in the
STATUS register is cleared.
See also chapter 6.9 - Overtemperature Mode .
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
42 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.6-1: Overtemperature Mode
Blocks/Function Description
Main Function Keep the device in a save state while the device cools down after switching off huge
parts of the device due to an overtemperature condition.
Analog part ON
ALI-ADC ON
ALI OFF
RSI-Loop OFF
LEDs OFF
Digital control All measurements but the automatic temperature measurement are stopped.
No start of measurements is accepted.
Following states Idle mode when the overtemperature condition is gone.
6.9.7 Sleep Mode
The sleep mode is entered using a SPI command to reduce power consumption when no measurements or config-
urations are made. No condition for FTM measurement (e.g. over temperature) must be active. It shuts down all
unused device units including the oscillator.
A low phase of the CSB input not less than tWAKEUP is required for wake-up.
Table 6.9.7-1: Sleep mode
Blocks/Function Description
Main Function Low Power Mode to reduce power consumption when no measurements or config-
urations are made.
Analog part OFF
ALI-ADC OFF
ALI OFF
RSI-Loop OFF
LEDs OFF
Digital control No access to the device at all.
Only wake-up with low phase of CSB is accepted.
All measurements need to be stopped before this state can be entered.
Following states Leaving sleep mode (wake-up) returns to the Idle mode.
6.9.8 Digital Control Register
The next view sections provide information about the device registers and describe their bits.
Table 6.9.8-1: Register Description
Register Name Address Description
STATUS 0 Status register of the device.
MODE 1 Device mode settings.
CALIBRATION 2 Device calibration.
DEV_CFG 3 Device configuration.
RSI_CFG1 4 RSI mode and configuration settings.
RSI_CFG2 5 LEDA/LEDB current sink value.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
43 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Register Name Address Description
RSI_CFG3 6 RSI timing settings.
RSI_OUT_THR 7 Threshold value of the RSI threshold comparator.
AUTOM_CFG 8 Automatic measurement configuration.
LOG_EPS 9 Acceptable difference of ADC values while settling the ALI-LOG amp.
AVG_CFG 10 Average exponents for ADC measurements.
RSIVALH 14 Most significant bits of the RSI value.
RSIVALL 15 Least significant bits of the RSI value.
ADCVALH 16 Most significant bits of the ADC value register from the last manual measurement.
ADCVALL 17 Least significant bits of the ADC value register from the last manual measurement.
VTEMPH 18 When "automatic measurement mode", "rain sensor measurement mode", "manual
temperature measurement mode" or an over-temperature condition is active, the
most significant bits of the temperature measurement.
VTEMPL 19 When "automatic measurement mode", "rain sensor measurement mode", "manual
temperature measurement mode" or an over-temperature condition is active, the
least significant bits of the temperature measurement.
ALS0H 20 In "automatic measurement mode" the most significant bits of the ambient light
sensor 0 value.
ALS0L 21 In "automatic measurement mode" the least significant bits of the ambient light
sensor 0 value.
ALS1H 22 In "automatic measurement mode" the most significant bits of the ambient light
sensor 1 value.
ALS1L 23 In "automatic measurement mode" the least significant bits of the ambient light
sensor 1 value.
ALS2H 24 In "automatic measurement mode" the most significant bits of the ambient light
sensor 2 value.
ALS2L 25 In "automatic measurement mode" the least significant bits of the ambient light
sensor 2 value.
ALS3H 26 In "automatic measurement mode" the most significant bits of the ambient light
sensor 3 value.
ALS3L 27 In "automatic measurement mode" the least significant bits of the ambient light
sensor 3 value.
RS/ALS4H 28 In "automatic measurement mode" the most significant bits of the rain sensor output
value.
(Intended for use as fifth ALI channel only)
RS/ALS4L 29 In "automatic measurement mode" the least significant bits of the rain sensor output
value.
(Intended for use as fifth ALI channel only)
ICALH 30 In "automatic measurement mode" the most significant bits of the ALI calibration
current value.
ICALL 31 In "automatic measurement mode" the least significant bits of the ALI calibration
current value.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
44 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-2: Register STATUS (0) Status register of the device.
MSB LSB
Content DEVRDY RST OVER_TE OVER_VO ECC_ERR Reserved[2:1] BUSY
MP LTAGE
Reset value 0 1 0 0 0 0 0
Access R R/W R/W R/W R R R
Bit Description DEVRDY : This bit signals that the device is out of the initialisation phase and ready to work.
Unless this bit is set AUTOMODE and RUNRSI bits are stored but not executed.
Only READ- & WRITE commands are accepted while DEVRDY is not set.
RST : This bit is set always after a system reset and also after power up.
The bit can be cleared by writing a '1'.
OVER_TEMP : Over Temperature occurred.
The bit can be cleared by writing a '1' when the over-temp condition has vanished.
Refer to chapter 6.9 for details
OVER_VOLTAGE : Over Voltage occurred. This is recorded for user information only because
the device is not able to protect itself in this situation.
The bit can be cleared by writing a '1'.
ECC_ERR : An uncorrectable ECC error was detected in the trim section of the IC. Default trim
values are used to reach a save state. The chip is not calibrated in that case and the specified
parameters are not guaranteed. The oscillator frequency is FCLK,DEF to ensure a save SPI commu-
nication.
Reserved[2:1] : Reserved. Read as 0.
BUSY : When the busy bit is set, the device processes a pending measure.
In the manual measurement mode the bit is reseted when the measurement is finished and the
result of the measurement is available.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
45 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-3: Register MODE (1) Device mode settings.
MSB LSB
Content HOLDRSI RUNRSI AUTO- BURST- Reserved WSFCT[2:0]
MODE MODE
Reset value 0 0 0 0 0 0
Access R/W R/W R/W R/W R R/W
Bit Description HOLDRSI : Writing a '1' to this bit (when RUNRSI=b1) disables the LEDs and pause the HALIOS
rain sensor measurement.
In contrast to clearing the RUNRSI bit, setting HOLDRSI does not reset the low- and highpass
filter states. Hence the filter does not need to fully settle when the RSI measurement is rein-
voked by clearing HOLDRSI later.
Note that manual and automatic ALS measurement of the RS/ALS4 channel is not possible if
HOLDRSI and RUNRSI is set.
RUNRSI : Writing a '1' to this bit enables the LEDs and starts the HALIOS rain sensor loop.
Writing a '0' to this bit disables the LEDs, switches off the HALIOS rain sensor measurement and
resets the current low- and highpass filter states.
Note that manual and automatic ALS measurement of the RS/ALS4 channel is not possible if
RUNRSI is set. Accordingly RUNRSI can not be set if a manual or automatic ALS measurement
of the RS/ALS4 channel is running.
AUTOMODE : Writing a '1' to this bit starts the automatic measurement mode.
Writing a '0' to this bit stops the automatic measurement mode.
Note that automatic measurement of the RS/ALS4 channel is not possible if RUNRSI is set.
BURSTMODE : Writing a '1' to this bit forces MEASURE commands to run in burst mode. The
burst mode is an endless repeated plain measurement of one channel without automatic settling
control.
The burst mode is stopped by writing a '0' to this bit or by sending a STOPMEAS command.
Reserved : Reserved. Read as zero.
WSFCT[2:0] : Function of the WS output pin:
b000: No output, pull-down resistor active
b001: Sigma-Delta stream output (SD-stream) of RSI (additional bitstream available pulse BSAV
at pin MISO)
b010: Only for production test: output of RSI comparator
b011: Output of the digital threshold comparator
b100: Output DAV pulse if a new value from RSI is available
b101: Output DAV pulse if a new measurement value from ALI is available.
During overtemperature a pulse is generated for every forced temperature measurement.
b110: Output DAV pulse if a new measurement value from ALI or RSI is available (Logical OR
combine the outputs of WSFCT b100 and b101)
b111: Only for production test: output equals input of pin TMODE
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
46 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-4: Register CALIBRATION (2) Device calibration.
MSB LSB
Content Reserved LED_DRV LEDB_ON LEDA_ON CALI CALG CALH CALL
Reset value 0 0 0 0 0 0 0 0
Access R R/W R/W R/W R/W R/W R/W R/W
Bit Description Reserved : Reserved. Read as 0.
LED_DRV : LED Drive Control for rain sensor coupling factor measurement
0: normal operation
1: LEDA and LEDB are controlled by bits 5 and 4
Note 1: RSI must be disabled when switching LED_DRV to 1
Note 2: FTM will be active when LED_DRV=1
Note 3: The bits LEDA_ON and LEDB_ON should be set to zero before LED_DRV is changed.
That ensures the specified slope of LEDx current.
LEDB_ON : Force LEDB ON
0: LEDB is off, idle current ILEDx,LOW is active
1: LEDB is on, ILEDx current is active
Note: only applicable when LED_DRV=1 else LED is controlled by RSI logic
LEDA_ON : Force LEDA ON
0: LEDA is off, idle current ILEDx,LOW is active
1: LEDA is on, ILEDx current is active
Note: only applicable when LED_DRV=1 else LED is controlled by RSI logic
CALI : Interchange the IREF current with the ICAL current for ALI calibration measurement CMB
(described in chapter 6.6.2.1).
0: normal operation
1: IREF and ICAL of ALI are interchanged
CALG : Only for production test. Must remain zero.
CALH : Only for production test. Must remain zero.
CALL : Only for production test. Must remain zero.
Table 6.9.8-5: Register DEV_CFG (3) Device configuration.
MSB LSB
Content Reserved[7:3] INC NOPAR- SELDRV
ITY
Reset value 0 0 1 0
Access R R/W R/W R/W
Bit Description INC : Systematic offset of ALI for short circuit detection.
NOPARITY : Writing a '1' to this bit disables the processing of the TX parity bit. The ECS bit (par-
ity error) of the status byte (which is send back to the SPI master) is then always '1'.
Changes to this bit become valid at the end of the transaction (rising edge of CSB) that changes
the bit.
SELDRV : Select pad driving strength for MISO and WS:
b0: reduced driving strength
b1: normal driving strength
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
47 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-6: Register RSI_CFG1 (4) RSI mode and configuration settings.
MSB LSB
Content RSIGAIN[7:4] Reserved[ BYPASS_ RSI_MODE[1:0]
3] HP
Reset value 0 0 0 0
Access R/W R R/W R/W
Bit Description RSIGAIN[7:4] : Gain of the RSI input amplifier in 2.8 dB steps.
Reserved[3] : Reserved. Read as zero.
BYPASS_HP : Bypass the highpass filter within the RSI filter chain
b0: no bypass (lowpass + highpass filter)
b1: bypass (lowpass filter)
RSI_MODE[1:0] : RSI timing mode.
b00: relative mode
b01: differential mode
b10: alternative relative mode
b11: do not use; mapped to differential mode
Note that RSI_MODE can not be changed if MODE.RUNRSI is set.
Table 6.9.8-7: Register RSI_CFG2 (5) LEDA/LEDB current sink value.
MSB LSB
Content IW_LEDB[7:4] IW_LEDA[3:0]
Reset value 0 0
Access R/W R/W
Bit Description IW_LEDB[7:4] : Pulse current step value for LEDB in 2.5mA steps.
b0000: 2.5mA
b0001: 5.0mA
...
b1111: 40.0mA
IW_LEDA[3:0] : Pulse current step value for LEDA in 2.5mA steps.
b0000: 2.5mA
b0001: 5.0mA
...
b1111: 40.0mA
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
48 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-8: Register RSI_CFG3 (6) RSI timing settings.
MSB LSB
Content PHASE_DELAY[3:0] SAMPLE_ FREQ_SHIFT[2:0]
TIME
Reset value 0 0 0
Access R/W R/W R/W
Bit Description PHASE_DELAY[3:0] : Phase delay of the integration phase of RSI in 125ns steps (demodulator
at chapter 6.7).
b0000: min. phase delay
...
b1111: max. phase delay
SAMPLE_TIME : Length of integration phase of RSI (demodulator at chapter 6.7)
b0: 3 us
b1: 2 us
FREQ_SHIFT[2:0] : RSI modulator period (Halios period) [us]:
b000: 10,0
b001: 10,25
...
b111: 11,75
Table 6.9.8-9: Register RSI_OUT_THR (7) Threshold value of the RSI threshold comparator.
MSB LSB
Content THR_LVL[7:0]
Reset value 0
Access R/W
Bit Description THR_LVL[7:0] : Threshold value of the RSI threshold comparator.
The 8-bit value is extended to a 12 bit unsigned value by left padding b0000. It is compared to
the output of the RSI filter chain (RSIVAL).
If the absolute value of RSIVAL is greater than the extended THR_LVL the comparator outputs a
logic '1', otherwise a logic '0'.
The output is visible at WS (MODE.WSFCT: 011b)
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
49 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-10: Register AUTOM_CFG (8) Automatic measurement configuration.
MSB LSB
Content ALI_FORC Reserved ICAL RSIALS4 ALS3 ALS2 ALS1 ALS0
E_ON
Reset value 0 0 0 0 0 0 0 0
Access R/W R R/W R/W R/W R/W R/W R/W
Bit Description ALI_FORCE_ON : Prevent ALI module from switching on/off as long as a RSI measurement is
running. This prevents possible distortion of RSI values.
b0: ALI module is switched on if ALI measurement is running and off if ALI measurement is not
running.
b1: ALI module is switched on as long as RSI or ALI measurement is running. ALI module is
switched off if RSI and ALI measurements are not running.
Reserved : Reserved. Read as zero.
ICAL : When set the ALI calibration current is measured in the automatic measurement loop.
When cleared this measurement is skipped.
Note: To measure the ALI calibration current additional settings (calibration register) must be
made.
RSIALS4 : When set the rain sensor diode is measured in the automatic measurement loop.
This is intended for using the rain sensor input as fifth ALI channel.
This bit can not be set when the RUNRSI bit in the MODE register is set.
When cleared the measurement is skipped.
ALS3 : When set the ambient light sensor 3 diode is measured in the automatic measurement
loop.
When cleared this measurement is skipped.
ALS2 : When set the ambient light sensor 2 diode is measured in the automatic measurement
loop.
When cleared this measurement is skipped.
ALS1 : When set the ambient light sensor 1 diode is measured in the automatic measurement
loop.
When cleared this measurement is skipped.
ALS0 : When set the ambient light sensor 0 diode is measured in the automatic measurement
loop.
When cleared this measurement is skipped.
Table 6.9.8-11: Register LOG_EPS (9) Acceptable difference of ADC values while settling the ALI-LOG amp.
MSB LSB
Content LOG_EPS[7:0]
Reset value 00000011
Access R/W
Bit Description LOG_EPS[7:0] : ALI Automatic Settling Control.
While the ALI-LOG amplifier is settling the end of the settling phase is assumed when two con-
secutive ADC measurements have a difference smaller than or equal LOG_EPS. If settling can
not be detected within tALI,TIMEOUT the error flag CHN_INVALID will be set in the corresponding
channel result register.
The settling control is disabled in burst mode.
Note 1: LOG_EPS is an unsigned 8-bit value; the absolute value of the difference is taken for the
comparison: if abs(diff) <= LOG_EPS then the channel is assumed to be settled (stable).
Note 2: At very low currents it is possible that the automatic settling control settles to early due to
the very small settling slope of ALI output.
Note 3: With oscillating currents the automatic settling control settles to a current value between
min. and max. current or it does not settle.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
50 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-12: Register AVG_CFG (10) Average exponents for ADC measurements.
MSB LSB
Content TEMPAVG[7:6] MEASAVG[5:3] AUTOAVG[2:0]
Reset value 0 0 0
Access R/W R/W R/W
Bit Description TEMPAVG[7:6] : Exponent of the number of ADC values averaged when an auto. temperature
measurement is executed.
The number of ADC values averaged is given by .
The maximum number for TEMPAVG is 3 (binary "11"). This results in an averaging of 8 ADC
values.
MEASAVG[5:3] : Exponent of the number of ADC values averaged when a MEASURE (SPI)
command is executed.
The number of ADC values averaged is given by .
The maximum number for MEASAVG is 4 (binary "100"). This results in an averaging of 16 ADC
values.
When a value greater than 4 is written to MEASAVG it will be clipped down to 4.
AUTOAVG[2:0] : Exponent of the number of ADC values averaged in the "automatic measure-
ment mode"
The number of ADC values averaged is given by .
The maximum number for AUTOAVG is 4 (binary "100"). This results in an averaging of 16 ADC
values.
When a value greater than 4 is written to AUTOAVG it will be clipped down to 4.
Table 6.9.8-13: Register RSIVALH (14) Most significant bits of the RSI value.
MSB LSB
Content ERROR INVALID NEW_VAL LED_WRN RSIVAL[11:8]
Reset value 1 0 0 0 0
Access R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
INVALID : The RSI value is out of range. This bit is set when the internal filter logic detects a
clamping of the RSI bit stream to zero or to one. This can happen when the damping of one LED
group (LEDA/LEDB) becomes too high or one or more LEDs are damaged.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_WRN : LED Warning Flag:
0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
RSIVAL[11:8] : Most significant bits of the RSI value.
Note: RSIVAL[11:0] is a signed number in two's complement format.
Note: the RSIVAL range depends on the RSI_CFG1.BYPASS_HP bit:
if 0: range between -2048..2047 (HP)
if 1: range between 0..2047 (LP)
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
51 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-14: Register RSIVALL (15) Least significant bits of the RSI value.
MSB LSB
Content RSIVAL[7:0]
Reset value 0
Access R
Bit Description RSIVAL[7:0] : Least significant bits of the RSI value.
Note: RSIVAL[11:0] is a signed number in two's complement format.
Table 6.9.8-15: Register ADCVALH (16) Most significant bits of the ADC value register from the last manual meas-
urement.
MSB LSB
Content ERROR CHN_INVA NEW_VAL LED_DRV Reserved[3:2] ADCVAL[9:8]
LID
Reset value 1 0 0 0 0 0
Access R R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
CHN_INVALID : Bit is set if the measured Channel is not stable with respect of the selected
LOG_EPS value.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_DRV : LED Warning Flag:
0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
Reserved[3:2] : Reserved. Read as 0.
ADCVAL[9:8] : Most significant bits of the ADC value
Table 6.9.8-16: Register ADCVALL (17) Least significant bits of the ADC value register from the last manual meas-
urement.
MSB LSB
Content ADCVAL[7:0]
Reset value 0
Access R
Bit Description ADCVAL[7:0] : Least significant bits of the ADC value
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
52 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-17: Register VTEMPH (18) When "automatic measurement mode", "rain sensor measurement mode",
"manual temperature measurement mode" or an over-temperature condition is active, the most significant bits of
the temperature measurement.
MSB LSB
Content ERROR Reserved NEW_VAL LED_WRN Reserved[3:2] VTEMP[9:8]
Reset value 1 0 0 0 0 11
Access R R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
Reserved : Reserved. Read as 0.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_WRN : LED Warning Flag:
0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
Reserved[3:2] : Reserved. Read as 0.
VTEMP[9:8] : Most significant bits of the VTEMP value
Table 6.9.8-18: Register VTEMPL (19) When "automatic measurement mode", "rain sensor measurement mode",
"manual temperature measurement mode" or an over-temperature condition is active, the least significant bits of
the temperature measurement.
MSB LSB
Content VTEMP[7:0]
Reset value 11111111
Access R
Bit Description VTEMP[7:0] : Least significant bits of the VTEMP value
Table 6.9.8-19: Register ALS0H (20) In "automatic measurement mode" the most significant bits of the ambient
light sensor 0 value.
MSB LSB
Content ERROR CHN_INVA NEW_VAL LED_WRN Reserved[1:0] ALS0[9:8]
LID
Reset value 1 0 0 0 0 0
Access R R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
CHN_INVALID : Bit is set if the Channel is not stable with respect to the selected LOG_EPS
value.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_WRN : LED Warning Flag:
0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
Reserved[1:0] : Reserved. Read as 0.
ALS0[9:8] : Most significant bits of ambient light sensor 0
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
53 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-20: Register ALS0L (21) In "automatic measurement mode" the least significant bits of the ambient
light sensor 0 value.
MSB LSB
Content ALS1[7:0]
Reset value 0
Access R
Bit Description ALS1[7:0] : Least significant bits of ambient light sensor 0
Table 6.9.8-21: Register ALS1H (22) In "automatic measurement mode" the most significant bits of the ambient
light sensor 1 value.
MSB LSB
Content ERROR CHN_INVA NEW_VAL LED_WRN Reserved[1:0] ALS1[9:8]
LID
Reset value 1 0 0 0 0 0
Access R R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
CHN_INVALID : Bit is set if the Channel is not stable with respect to the selected LOG_EPS
value.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_WRN : 0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
Reserved[1:0] : Reserved. Read as 0.
ALS1[9:8] : Most significant bits of ambient light sensor 1
Table 6.9.8-22: Register ALS1L (23) In "automatic measurement mode" the least significant bits of the ambient
light sensor 1 value.
MSB LSB
Content ALS2[7:0]
Reset value 0
Access R
Bit Description ALS2[7:0] : Least significant bits of ambient light sensor 1
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
54 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-23: Register ALS2H (24) In "automatic measurement mode" the most significant bits of the ambient
light sensor 2 value.
MSB LSB
Content ERROR CHN_INVA NEW_VAL LED_WRN Reserved[1:0] ALS2[9:8]
LID
Reset value 1 0 0 0 0 0
Access R R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
CHN_INVALID : Bit is set if the Channel is not stable with respect to the selected LOG_EPS
value.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_WRN : 0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
Reserved[1:0] : Reserved. Read as 0.
ALS2[9:8] : Most significant bits of ambient light sensor 2
Table 6.9.8-24: Register ALS2L (25) In "automatic measurement mode" the least significant bits of the ambient
light sensor 2 value.
MSB LSB
Content ALS2[7:0]
Reset value 0
Access R
Bit Description ALS2[7:0] : Least significant bits of ambient light sensor 2
Table 6.9.8-25: Register ALS3H (26) In "automatic measurement mode" the most significant bits of the ambient
light sensor 3 value.
MSB LSB
Content ERROR CHN_INVA NEW_VAL LED_WRN Reserved[1:0] ALS3[9:8]
LD
Reset value 1 0 0 0 0 0
Access R R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
CHN_INVALD : Bit is set if the Channel is not stable with respect to the selected LOG_EPS
value.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_WRN : 0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
Reserved[1:0] : Reserved. Read as 0.
ALS3[9:8] : Most significant bits of ambient light sensor 3
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
55 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-26: Register ALS3L (27) In "automatic measurement mode" the least significant bits of the ambient
light sensor 3 value.
MSB LSB
Content ALS3[7:0]
Reset value 0
Access R
Bit Description ALS3[7:0] : Least significant bits of ambient light sensor 3
Table 6.9.8-27: Register RS/ALS4H (28) In "automatic measurement mode" the most significant bits of the rain
sensor output value.(Intended for use as fifth ALI channel only)
MSB LSB
Content ERROR CHN_INVA NEW_VAL LED_WRN Reserved[1:0] ALS4[9:8]
LID
Reset value 1 0 0 0 0 0
Access R R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
CHN_INVALID : Bit is set if the Channel is not stable with respect to the selected LOG_EPS
value.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_WRN : 0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
Reserved[1:0] : Reserved. Read as 0.
ALS4[9:8] : Most significant bits of ambient light sensor 4
Table 6.9.8-28: Register RS/ALS4L (29) In "automatic measurement mode" the least significant bits of the rain
sensor output value.(Intended for use as fifth ALI channel only)
MSB LSB
Content ALS4[7:0]
Reset value 0
Access R
Bit Description ALS4[7:0] : Least significant bits of ambient light sensor 4
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
56 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 6.9.8-29: Register ICALH (30) In "automatic measurement mode" the most significant bits of the ALI calibra-
tion current value.
MSB LSB
Content ERROR CHN_INVA NEW_VAL LED_WRN Reserved[1:0] ICAL[9:8]
LID
Reset value 1 0 0 0 0 0
Access R R R R R R
Bit Description ERROR : This bit is always set after a system reset (also after power up), if over
temperature/voltage occurs or if an ECC error occurs. Read STATUS register for details.
CHN_INVALID : Bit is set if the Channel is not stable with respect to the selected LOG_EPS
value.
NEW_VAL : The New Value Flag (NEW_VAL) is set to '1' when a new value is written to the
register, it is cleared to '0' when the value is read via the SPI.
LED_WRN : 0: no warning
1: LEDs controlled by CALIBRATION.LED_DRV bit
Reserved[1:0] : Reserved. Read as 0.
ICAL[9:8] : Most significant bits of the ICAL value
Table 6.9.8-30: Register ICALL (31) In "automatic measurement mode" the least significant bits of the ALI calibra-
tion current value.
MSB LSB
Content ICAL[7:0]
Reset value 0
Access R
Bit Description ICAL[7:0] : Least significant bits of the ICAL value
6.10 Digital Signal Processing
The digital signal processing of the device consists of two independent but loosely synchronized subsystems, the
HALIOS based rain sensor measurement subsystem (RSI) and the ADC based ambient light measurement subsys-
tem (ALS). The latter also provides measurement of the internal temperature sensor and internal current reference.
Both subsystems can be enabled independently and run almost independently of each other. The RSI subsystem
makes measurements (LED pulses) with a frequency of fRSI,MOD while the ALS subsystem in AUTOMODE measures
the selected channels in a tALI,AUTOM timing intervals. Note that a channel measurement can consist of more than one
ADC measurement due to averaging.
Since the ALS input stage needs to settle, the time needed for an ALS measurement with AUTOMODE or MEAS-
URE command is not constant. In extreme situations (i.e. very low currents, oscillating current or large noise) it is
possible that the settling time becomes longer than tALI,AUTOM (refer tALI,VALID). Then the next ALI channel measure-
ment is delayed to the next tALI,AUTOM interval time.
The ALI control machine contains an automatic digital settling control. The difference of two consecutive ALI ADC
measurement values is compared against a threshold value (LOG_EPS) and the ADC value is assumed to be not
settled until the difference of two measurements is smaller than or equal the threshold value. The measurement of
the channel will be repeated within an interval of tALI,TIMEOUT. If the channel does not settle within this time the error
flag CHN_INVALID will be raised in the corresponding channel result register and the ALI control continuous with
the next channel. See control register LOG_EPS for details.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
57 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
When RSI measurement (or coupling factor measurement) is not selected at all, then no LED stimuli signals are
generated. Nevertheless the ADC measurements keep the same timing intervals as when RSI measurements are
taken.
For more information on ADC averaging, see chapter 6.10.2.
6.10.1 Rain sensor data processing
The main subsystem is a HALIOS based rain sensor detection. When active, the subsystem generates stimuli
pulses for two LEDs as described in chapter 6.7. The received light is used as the input signal for the HALIOS loop.
An overview picture of the RSI subsystem (without SPI interface) is shown in 6.10.1-1.
0 000
001
RS Integrator LP HP 1 Threshold Triggered
010
RS BP incl. FF 011
WS
AMP Filter Filter 0 Comparator RSI_DAV 100
Demodulation
ALI_DAV
RSI RSI or ALI DAV
101
110
Rain Sensor Interface Digital Signal Processing TMode 111
BYPASS_HP
THRLVL
Bitstream
LEDA LED Current WSFCT
Modulator LEDCR Control
LEDB Registers RSIVAL
LED Driver
State
Machine
Digital control
BSAV (Bitstream data available)
001
Internal MISO else MISO
Figure 6.10.1-1: The RSI measurement unit
The output of the HALIOS loop is a bit stream that corresponds to the amount of received light reflection of the two
LEDs. The bit stream is used to select which of the two LEDs is fired next.
To roughly compensate differences in the common reflection received from the two LEDs, the sink current of the
LEDs can be adjusted in 16 steps for each LED using the RSI_CFG2 register.
The bit stream from the HALIOS loop is filtered to reconstruct a measure of the received light strength of the LED
pulses. The implemented filter chain consists of a decimation, a low-pass and a high-pass filter:
• The decimation filter is realized as a Cascaded-Integrator-Comb-Filter (CIC Filter) and is used to average and
decimate the incoming bitstream signal.
• The low-pass filter is realized as a 2nd order Butterworth filter with a corner frequency of fRSI,LP. It is used in com-
bination with the CIC filter to reconstruct a measure of the received light energy of the LED pulses.
• The high-pass filter is realized as a 1st-order filter with a corner frequency of fRSI,HP. It is used to roughly detect
changes of the received light energy which can be used in combination with the following threshold comparator
to estimate the occurrence of rain drops. Both filters run at a sampling frequency of fRSI_DAV which also represents
the update frequency of the RSI data. Note: The high-pass filter can be bypassed using the configuration bit
RSI_CFG1.BYPASS_HP.
The output of the filter chain is stored in the RSIVAL register for further processing. It is also fed into a threshold
comparator. The threshold level of the comparator can be programmed using the 8-bit THR_LVL value in the
RSI_OUT_THR register.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
58 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Since the filter chain output is a 12 bit signed value, its absolute value is compared to the threshold value. The 8-bit
THR_LVL value is extended by left-padding four binary zeros.
Compout = filterout > THR_LVL
If the absolute of the filter chain output is greater than the extended THR_LVL value, the comparator outputs a logic
'1', otherwise a logic '0' The result of the comparison can be routed to the WS pin using the MODE register for fur-
ther processing.
6.10.2 ADC based measurement
The second subsystem is an ADC based measurement system for up to five ambient light sensors, an integrated
temperature sensor and an integrated reference voltage.
ADC based measurements can be done in two different ways, "automatic measurement mode" and "manual meas-
urement mode".
An overview picture of the ALS subsystem (without SPI interface) is shown in 6.10.2-1.
Analog Control
Temperature
VREF References
Sensor
Diagnosis signals
State
ALS0 Maschine
ALS1
ADC ADC Control
ALS ALS
MUX
Converter
ALS2 MUX AMP Averaging Registers
ADC
ALS3 Digital control
RS
Ambient Light Interface
Figure 6.10.2-1: The ADC measurement unit
In the automatic measurement mode the device measures a predefined set of ADC channels periodically. The
channels that should be measured are set in the AUTOM_CFG register.
To reduce noise there is the possibility to automatically average a number of measures before providing the result
to the user. The number of averages can be set using the AVGEXP[1:0] bits in the AVG_CFG register.
The result of the measurements are provided in the corresponding registers:
• ALS0-3 - for the ambient light sensors 0-3
• RS/ALS4 - RS diode used as fifth ambient light sensor. See details below.
• ICAL - for the internal ALI calibration current
• VTEMP - for the internal temperature sensor
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
59 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
The RSI/ALI4 channel is the device input of the rain sensor, measured using the ALI ADC. This channel is useful
when a fifth ALI sensor is required and no rain sensor interface is needed.
Selecting this channel for automatic or manual measurement is not possible, when the rain sensor interface is
switched on.
Accordingly the RUNRSI bit can not be set when this channel is used for automatic or manual measurement.
In the manual measurement mode the user can initialize a one-time measurement with the command MEASURE.
MEASURE takes the channel number as parameter. The applied average is set using the MEASAVG bits in the
AVG_CFG register. Note that the number of averages is independent from the value set using the AUTOAVG bits
in the same register to allow flexible "single shot" measurements.
With the MEASURE command there are more channels available as in the AUTOMEASURE mode. Refer to
6.11.2-2 for a complete list of available channels.
In both modes averaging is done by repeated measurement of a particular channel, before the next channel is pro-
cessed. The averaged value for each channel is calculated by:
with
The expreg is either TEMPAVG, MEASAVG or AUTOAVG, depending of the executed measurement. These three
average exponents can be set in the AVG_CFG register.
Note that this is not a moving average since the intention of this operation is not low pass filtering, but noise reduc-
tion.
Since manual measurements are synchronized with running auto-measurements they may not execute immedi-
ately. A running manual measure is indicated by the BUSY flag in the status register. When doing a measure in the
"manual measurement mode" this flag should be checked to determine if the requested measure was finished.
When the manual measurement is finished the result is available in the ADCVALH/ADCVALL register pair.
A special case of the MEASURE command can be invoked using the BURSTMODE bit in the MODE register.
When this bit is set and a MEASURE command is send to the device, a running AUTOMEASURE is
interrupted and the MEASURE command is executed repeatedly without any delay between consecutive meas-
ures.
The result is available in the ADCVALH/ADCVALL register pair.
This repeated measure can be stopped by either clearing the BURSTMODE bit in the MODE register or by sending
a STOPMEAS command to the device. An interrupted AUTOMEASURE will be resumed.
6.10.3 WS Output Function
The function of the WS output pin can be configured using the control register MODE.WSFCT.
See the register description for a list of the selectable functions.
A detailed description of the function follows:
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
60 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Sigma Delta Stream Output
This function allows to stream out the bitstream of the Rain Sensor Interface. The bitstream is multiplexed to the
WS pin and concurrently a bitstream available (BSAV) signal is multiplexed to the MISO Pin of the SPI interface.
The BSAV pulse can be used to trigger the sampling of the bitstream.
Output of the digital threshold comparator
The output of RSI filter chain (low pass/high pass filter) is fed into a digital comparator:
If the absolute of the filter chain output is greater than the extended THR_LVL value, the comparator outputs a logic
'1', otherwise a logic '0'. The result of the comparison will be routed to the WS pin for further processing. See
chapter 6.10.1 for a detailed description.
Output DAV pulse if a new value from RSI is available
This function routes the internal RSI data available signal to the WS Pin. The period(fRSI,DAV) of this signal repres-
ents the internal sampling frequency of the down-sampled bitstream.
Output DAV pulse if a new measurement value from ALI is available.
This function routes the internal ALI data available signal to the WS Pin. The signal will be raised each time an ALI-
ADC measurement writes new data to the related result register.
Note: During over-temperature state a pulse is generated for every forced temperature measurement.
Output DAV pulse if a new measurement value from ALI or RSI is available
In this mode the DAV pulses of RSI and ALI are logically OR combined and routed to the WS Pin
Note: If a pulse will be output at WS or MISO (DAV or BSAV pulse) the pulse width will be tDAV_PULSE
6.11 Serial Peripheral Interface (SPI)
CSB
tC(SCLK) tW(CSBH)
SCLK
tSU(MOSIV)
MOSI MSB in b6 .. b1 in LSB in
tEN(CSBL-MISOV) tA(SCLK-MISOV)
MISO MSB out b6 .. b1 out LSB out (not valid)
Figure 6.11-1: SPI Timing Diagram
The SPI (Serial Peripheral Interface) provides access to the complete control of the device.
6.11.1 SPI Format
This chapter gives detailed information about the different commands available for the device.
The device supports 3-wire and 4-wire SPI communication. When using 3-wire SPI the CSB signal must be tied to
digital ground. No further precaution is needed.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
61 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Since CSB is also used for wake-up the device from sleep mode there is no usable sleep mode available with 3-
wire SPI. Moreover, since the device can't detect if the CSB pin is used, there is no way to protect the device from
executing a SLEEP command accidently send by the SPI master.
Hence 3-wire SPI is not recommended and should be seen as last resort solution when pin count at the SPI master
becomes a serious issue.
In this chapter all examples are shown for 4-wire SPI.
On 4-wire SPI a communication cycle starts with a falling edge on CSB. The communication cycle ends with a
rising edge on CSB. This sets the MISO output to high-impedance state and cleans-up the internal SPI state. Pro-
cessing of more than one transaction in a communication cycle is possible.
Data is transmitted with most significant bit first (MSB).
All communication is made in form of transactions. The SPI works as a slave only. It never initiates a communica-
tion cycle. Hence all transactions start by the SPI master, sending a sequence of bytes to the device.
As first byte of a transaction a command is expected by the device. A list of available commands is given in chapter
6.11.2. Depending on the command a data byte is expected as second byte.
Finally the device expects a byte containing a parity bit as MSB. All other bits in this byte are ignored.
The device verifies the received command and data against the parity bit. If the total number of logical ones is not
odd, the command is assumed to be corrupted. In this case the device will set the ECS bit in the status byte and
does not execute the command.
The parity mechanism can be disabled by setting the NOPARITY bit in the DEV_CFG register (see chapter 6.9.8).
When NOPARITY is set the whole last byte is ignored and the command is always executed (assuming no further
errors occur).
In addition, the ECS bit is set in the status byte to indicate that no successful parity check has been performed.
• NOTE: For reading data from the device the master doesn't need to provide the parity byte at all. This is due to
the fact that reading data can't provide any harm to the device state. Hence the device handle all read com-
mands in the same way as when the NOPARITY bit was set. Note that this also means that the ECS bit is set in
the status bit of every read command.
Besides to the transmitted parity bit, the device provides a further mechanism which allows the SPI master to check
whether the data has been transferred correctly.When the device receives a bit from the master (MOSI) then the bit
is registered in the SPI input register. The inverted bit is send back to the master (MISO). Because the bit is
registered first, the bit returned is delayed by one SCLK cycle.
6.11.1-1 shows the processing of an 8-bit command as an example.
After CSB has become active (CSB=0) the data provided by the master is registered at every rising edge of SCLK.
The most significant bit of the command (C7) is registered with the first rising edge of SLCK and the inverted value
of C7 is provided on MISO at the falling edge of SCLK. In 6.11.1-1 this is marked with a small arrow.
When the complete command byte (C7-C0) is sent, the device sends a status byte including a parity bit (PRX) and
four error flags. The PRX bit is generated over all mirrored bits sent to the master and the status byte itself to
provide an odd parity.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
62 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
CSB
SCLK
Bit No. 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0
Command Parity
P
MOSI C7 C6 C5 C4 C3 C2 C1 C0
TX
X
Inverted Cmd Parity & Errors
P E E E E
MISO X C7 C6 C5 C4 C3 C2 C1 C0 0
RX UC AD RO CS X
Figure 6.11.1-1: Bit echoing and status
Four error flags indicate problems with the command sent. If one of these bits is '1' the appropriate error has
occurred. The following bits are defined:
• EUC (Unknown command error): The given command is not known by the device.
• EAD (Address error): The given address coded in the command is invalid. This might occur in read & write oper-
ations only.
• ERO (Read Only error): An attempt to write to a read only address was made. This might occur in write opera-
tions only.
• ECS (Parity error): The command or data doesn't match the (odd) parity bit.
Note that ECS is also set when a read command is processed or the NOPARITY bit in the MODE register is set.
This is because in this situations no parity check is made at all and hence it can't be successful. However, in this
situations the command is still executed.
A further error is signalised when the device received a valid command but is unable to execute it.
• ENE (Not Executable error): The command can not be executed yet.
This error is signalised by raising the EUC and EAD bits at the same time. (This normally can't happen because an
unknown command does not provide an address at all and hence that address can not be wrong.)
An ENE error occurs when a user command tries to execute a command that is not executable in the actual device
state, i.e. sending a MEASURE command while another MEASURE command is running. Another popular example
is sending a SLEEP command while the device is still running RSI or AUTOMODE measurements. When an ENE
error occurs the device does not execute the command but raises the EUC and EAD bits in the status, returned to
the SPI-master.
6.11.1-2 shows an example of a read command. No parity bit is added to the command byte (hence no additional
byte) because the whole transaction, including the command itself can be verified using the mirrored bits sent back
to the master.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
63 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
After the command is transferred the device starts sending the requested data (D7-D0) followed by the status byte.
The position of the parity and error bits is the same as in the command shown above. The three MSBs are con-
stantly set to '0' because, in the case of read commands, the command bit C0 is not used and therefore the inver-
ted command bit C0 is not sent. (Note: In the case of commands other than read commands, the LSB of the inver-
ted command or data byte was assigned to bit 7 of the status byte.)
The ERO bit is always '0' because no write access was made at all. The ECS bit is always '1' as described above.
The only possible error situations that can occur are when an unknown command was received or an invalid
address is given by the read command. This is signalled by setting the EUC bit and/or the EAD bit to '1' (marked
red for reference).
CSB
SCLK
RD_BYTE Cmd
MOSI 1 1 A4 A3 A2 A1 A0 X X
Inverted Cmd Data from Register Parity & Errors
P E E
MISO X 0 0 A4 A3 A2 A1 A0 D7 D6 D5 D4 D3 D2 D1 D0 0
RX UC AD
0 1 X
Figure 6.11.1-2: Read byte and parity
The SPI features a timeout monitor to prevent communication errors due to missing SCLK edges.
During a running transaction the maximum allowed time between two SCLK edges must be less than tTO(SPI).
After this time the transaction is aborted and the SPI is reset to its initial state.
6.11.1.1 8 bit commands
8-bit commands consist of a single byte of data and an (optional) byte carrying the parity bit send from the SPI-
master.
6.11.1.1-1 shows an example diagram for the RESET command.
After the falling edge of CSB the MISO Signal becomes active. The initial value of the MISO signal is undefined
because the device has not received any data to echo yet.
The eight bits of the command are provided by the master at the MOSI signal and registered by the slave on the
rising edge of SCLK.
On the falling edge of SCLK the received bits are inverted and mirrored at the MISO signal for verification as
described in chapter 6.11.1.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
64 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
CSB
SCLK
Bit No. 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0
RESET cmd Parity
P
MOSI 0 0 0 0 1 1 0 1
TX
X
Inverted Cmd Parity & Errors
P E E E
MISO X 1 1 1 1 0 0 1 0 0
RX UC AD
0
CS
X
Figure 6.11.1.1-1: 8-Bit command with parity
When the command byte is transferred (after eight SCLK pulses) the device provides a status byte at the MISO line
for the next eight SCLK pulses while receiving the parity bit as MSB on the MOSI line. Further data on MOSI is
ignored for these SCLK pulses.
When the second byte is transferred, the device verifies the command against the parity bit. When this check is
successful (the parity over command byte and parity bit is odd) the command is executed.
Otherwise either the command is not known by the device or the checksum test has failed. In the first case the
EUC bit is set, in the second case the ECS bit is set and the command is abandoned.
When the NOPARITY-bit is set in the DEV_CFG register the command is executed after the eight SCLK pulse
unless the command is not recognised. In this case the EUC bit is set in the status byte.
An example is given in 6.11.1.1-2.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
65 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
CSB
SCLK
Bit No. 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0
RESET cmd
MOSI 0 0 0 0 1 1 0 1 X
Inverted Cmd Parity & Errors
P E E
MISO X 1 1 1 1 0 0 1 0 0
RX UC AD
0 1 X
Figure 6.11.1.1-2: 8-Bit command without parity
6.11.1.2 Write commands
The device accepts write commands for 8-bit values. A status byte, including parity- and error bits, is returned by
the device after the data transfer.
6.11.1.2-1 shows the transfer of a byte to a register.
After the falling edge of CSB the MISO Signal becomes active. The initial value of the MISO signal is undefined
because the device has not received any data to echo yet.
On the falling edge of SCLK the received bits are inverted and mirrored at the MISO signal for verification.
The write-byte command and data are provided by the master at the MOSI signal and registered by the slave on
the rising edge of SCLK.
Note that the address of the destination register is embedded into the write-byte command, shown as bits A4 .. A0.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
66 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
CSB
SCLK
WR_BYTE Cmd Data to Register Parity
P
MOSI 0 1 A4 A3 A2 A1 A0 0 D7 D6 D5 D4 D3 D2 D1 D0
TX
X
Inverted Cmd Inverted Data byte Parity & Errors
P E E E E
MISO X 1 0 A4 A3 A2 A1 A0 1 D7 D6 D5 D4 D3 D2 D1 D0 0
RX UC AD RO CS X
Figure 6.11.1.2-1: Write byte command with parity
Finally a byte is transferred with a parity-bit as most-significant-bit.
After transmission of this byte the device verifies the transmitted command & data against the parity bit. When this
verification is successful the data byte is assigned to the addressed register and a status byte is sent back to the
master.
Otherwise one (or more) of the following errors has occurred
• The command is not known by the device. Then the EUC-bit is set in the status byte.
• The command tries to write to an invalid address. Then the EAD-bit is set in the status byte.
• The command tries to write to a read-only register. Then the ERO-bit is set in the status byte.
• The command is correct but can't be executed yet (i.e. trying to set the RSIALS4 bit while RSI is running). Then
the EUC and EAD bits are set to signal an ENE error.
• The checksum test has failed. Then the ECS-bit is set in the status byte.
In all of these cases the status byte is sent back to the SPI master and no data is written to a register.
Finally, with the rising edge of CSB the MISO signal becomes Hi-Z and the SPI is set to the initial state.
Parity handling can be disabled globally by setting the NOPARITY bit in the DEV_CFG register. 6.11.1.2-2 shows
the same transaction as 6.11.1.2-1 but with NOPARITY set. Note that the ECS bit is always set as described in
chapter 6.11.1.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
67 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
CSB
SCLK
WR_BYTE Cmd Data to Register
MOSI 0 1 A4 A3 A2 A1 A0 0 D7 D6 D5 D4 D3 D2 D1 D0 X
Inverted Cmd Inverted Data byte Parity & Errors
P E E E
MISO X 1 0 A4 A3 A2 A1 A0 1 D7 D6 D5 D4 D3 D2 D1 D0 0
RX UC AD RO
1 X
Figure 6.11.1.2-2: Write byte without parity
6.11.1.3 Read commands
The device accepts read commands for 8-bit and 16-bit values.
6.11.1.3-1 shows the read operation for a single byte from a register.
After the falling edge of CSB the MISO Signal becomes active. The initial value of the MISO signal is undefined
because the device has not received any data to echo yet.
On the falling edge of SCLK the received bits are inverted and mirrored at the MISO signal for verification. The last
data bit is not mirrored.
The RD_BYTE command is provided by the master at the MOSI signal and registered by the slave on the rising
edge of SCLK. Note that the address of the source register is embedded into the RD_BYTE command, shown as
bits A4 .. A0.
When the command is transferred (after eight SCLK pulses) the device provides the content of the addressed
register at the MISO line for the next eight SCLK pulses.
Finally a status byte is transferred. The status byte has the same content as described in section 6.11.1.2.
To keep byte-aligning of the data transmission the LSB of the command is not transferred as MSB in the second
byte and hence not observable (this is in contrast to 8-bit and write commands).
To get rid of this problem the LSB of the RD_BYTE & RD_WORD commands can be either '0' or '1'. That means it
doesn't care.
All data on MOSI is ignored while the device sends data or status bytes.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
68 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
CSB
SCLK
RD_BYTE Cmd
MOSI 1 1 A4 A3 A2 A1 A0 X X
Inverted Cmd Data from Register Parity & Errors
P E E
MISO X 0 0 A4 A3 A2 A1 A0 D7 D6 D5 D4 D3 D2 D1 D0 0
RX UC AD
0 1 X
Figure 6.11.1.3-1: Read byte command
Note: All read commands do not require sending a parity bit from the SPI master as described in chapter 6.11.1.
Note: The new value flag (NEW_VAL) of an accessed result register will be cleared either when accessing an even
address (high byte) with the RD_BYTE command or when accessing the register with a RD_WORD command.
Note: Result registers (addresses 0x0E to 0x1E) are required to be read using the RD_WORD command since only
the RD_WORD command allows a consistent access to the 16 bit value of the register.
During execution the following errors can occur
• The command is not known by the device. Then the EUC-bit is set in the status byte.
• The command tries to read from an invalid address. Then the EAD-bit is set in the status byte and a zero data
value (all data bits are '0') is returned.
The RD_WORD command can be used to read a 16 Bit word from two consecutive registers. An example is given
in 6.11.1.3-2.
RD_WORD behaves similar to RD_BYTE but generates only one status byte for the two bytes read. This is useful
for reading the register pairs that contains 16- bit values spread over two consecutive registers.
Note that the address bit A0 must be set to '0' for word reads. Otherwise the device will reject the command with an
EAD error.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
69 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
CSB
SCLK
RD_WORD Cmd
MOSI 1 0 A4 A3 A2 A1 0 X X
Data from Register Data from Register
Inverted Cmd A[4:0] A[4:0] + 1 Parity & Errors
D D D D D D D D D D D D D D D D P E E
MISO X 0 1 A4 A3 A2 A1 1
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0
RX UC AD
0 1 X
Figure 6.11.1.3-2: Read word command
6.11.2 SPI Commands
The following 6.11.2-1 lists all SPI commands.
Table 6.11.2-1: SPI Command Table
Command bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0 Description
NOP 0 0 0 0 0 0 0 0 No Operation
STOPMEAS 0 0 0 0 1 0 1 0 Stop repeated execution of a MEASURE command when
the device is in burst mode.
(Doesn't affect MEASURE commands when the device is
not in burst mode)
RESET 0 0 0 0 1 1 0 1 Reset complete logic.
SLEEP 0 0 1 0 0 1 0 0 Send device to sleep mode. This command is only accep-
ted when the DEVRDY bit in the STATUS register is set
and no RSI or ALS measurements are running.
MEASURE 0 0 1 1 CH3 CH2 CH1 CH0 Start a single ADC measurement. This command is only
accepted when the DEVRDY bit in the STATUS register is
set and no over-temperature condition is pending.
WR_BYTE 0 1 A4 A3 A2 A1 A0 0 Write a 8 bit word.
RD_BYTE 1 1 A4 A3 A2 A1 A0 X Read a 8 bit word.
RD_WORD 1 0 A4 A3 A2 A1 0 X Read a 16 bit word.
Legend :
B : b0 clear , b1 set;
A4 to A0 : 5 bit address;
CH3 to CH0 : ALS ADC measurement channel;
X unused
The commands can be divided in 8 bit commands which are executed after reading the command byte (and parity
bit, if applicable), and read/write commands where the length is variable and the execution is performed during the
transmission.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
70 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
A special kind of command is the MEASURE command. While other commands execute when the commands (and
parity, if applicable) are correct, the MEASURE command only initiates a measurement to be processed at the next
possible time slot. This ensures that running AUTOMEASURE measurements are not aborted.
The MEASUREMENT command immediately sets the BUSY bit in the status register. As long as this bit is set the
measurement is processing. When the requested measurement has finished the BUSY bit is cleared and the result
is transferred to the ADCVAL register.
Note that the rain sensor input may be used as ALS4 input channel. Therefore a MEASUREMENT command for
the RS/ALS4 channel is skipped without further notice (i.e. no error is raised) when the rain sensor interface is run-
ning (RUNRSI bit is set).
Note that the RSI unit and the ALS4 measurement share the same physical register (accessible via different phys-
ical addresses).
The channels that can be measured with the MEASUREMENT command are given in 6.11.2-2 below.
Table 6.11.2-2: Channel assignment for the MEASUREMENT command
Channel number Channel name Measured value
0 ALS0 Input current of ambient light sensor 0
1 ALS1 Input current of ambient light sensor 1
2 ALS2 Input current of ambient light sensor 2
3 ALS3 Input current of ambient light sensor 3
4 RS/ALS4 Input current of rain sensor (measured via ALI-ADC)
5 ICAL Internal ALI calibration current,
Note: To measure the ALI calibration current additional settings
(calibration register) may have to be done.
6 VTEMP Internal temperature sensor
7 VREF Reference voltage at pin VREF (only for diagnose)
8 RSIINT Output of the RSI integrator (only for diagnose)
9 VIREF Voltage of ALI-IREF current over an internal resistor (only for diagnose)
10 VDDA Internal divided digital supply voltage (only for diagnose)
11 VDDD Internal divided analog supply voltage (only for diagnose)
12 VBG Internal bandgap voltage (only for diagnose)
13 reserved Reserved, do not use
14 reserved Reserved, do not use
15 reserved Reserved, do not use
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
71 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
7 EMC - Electromagnetic Compatibility
For the EMC tests, a test setup is used which corresponds to a typical application. Therefore, the test setup is
based on the circuit shown in 10-1 and described in chapter 10.
The Elmos E520.34 LIN-SBC is only used as 3.3V voltage regulator to supply the 527.04 with 3.3V. The functional-
ity of the E520.34 LIN-SBC is not part of the EMC tests. An external 13.5V voltage source is used as module sup-
ply (VBAT).
To generate a reasonable rain sensor signal a simple optical system for the rain sensor is used. The coupling factor
of the optical system must match with the RSI configuration.
To test all basic functions of the 527.04, five operating modes are defined:
• ALS burst mode
• ALS auto mode
• RSI mode 0
• RSI mode 1
• RSI mode 2
7.1 EME - Electromagnetic Emission
For the EME test the 527.04 must be configured via SPI. This can be done, for example, by an external microcon-
troller. The measured bandwidths are described in 7.1-1.
Table 7.1-1: Bandwidths related to Frequency Ranges for EME Measurements
Frequency range BW Detector type
150kHz - 30MHz 9kHz Peak detector
30MHz - 1GHz 120kHz Peak detector
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
72 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
7.1.1 Conducted EME for Module Supply
Conducted emission for module supply VBAT will be measured according to IEC 61967-4 (150R-Method). The
measurement circuit is shown in 7.1.1-1. The decoupling network for the supply VBAT is only shown in principle as
the sub-block "VBAT decoupling network". 7.1.1-2 shows the sub-block in detail.
VBAT
VBAT DVLED CVLED1 CVLED2
decoupling CVSUP BAS521 100nF 22µF
ZVSUP
network 100nF
13.5V
DVS CVS1 CVS2
SMAJ36CA RWAKE_N
BAS521 100nF 22µF
GND 33kΩ
Module 120Ω RVBAT CVBAT
supply 47Ω 47nF
CVDD
6.8nF CVDDA
CVDDD
10µF 220nF LEDA LEDB
220nF SFH420 SFH420
50Ω VBAT VS WAKE_N VDD VDDA VDDD
ATB
WDOSC TMODE
RW DOSC RA
100kΩ WDDM LEDA
50Ω 0Ω
coaxial GNDL RB
cable LEDB
0Ω
RS
PDRS
SFH2400FA
VRF 50Ω
E520.34 E527.04 VREF
CVREF
1nF PDALS3
LIN TEMD6200FX
ALS3 PDALS2
Measuring ALS2 PDALS1
equipment GND
ALS1 PDALS0
DIV_ON
RES_N
WDIN
MOSI ALS0
MISO
RXD
SCK
TXD
WS
EN
CS
PV
GND GNDD GNDA
GPIO
SPI
GPIO
GPIO
GPIO
SPI
SPI
SPI
ADC_IN
RESET_N
LIN
LIN
µC
GND
External microcontroller
Figure 7.1.1-1: Conducted EME measurement circuit
D1 L1 L2
external VBAT 47µH WE7427504 internal VBAT
supply BYM11
C1 C2
1nF 330pF
Figure 7.1.1-2: VBAT decoupling network schematic
The EME limit line is shown in 7.1.1-3.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
73 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
300kHz
70
150kHz
60
10MHz
Emission [dBµV]
750kHz
50
40
30
76MHz
20
0.1 1 10 100 1000
Frequency [MHz]
Figure 7.1.1-3: Limit Line for conducted EME
7.2 EMS - Electromagnetic Susceptibility
The frequency step sizes for EMS test are described in 7.2-1. All frequency steps must be me measured with CW
and AM 80% 1kHz modulation.
Table 7.2-1: Frequency Step Sizes for EMS measurement
Frequency range Step size
1MHz - 100MHz 1MHz
100MHz - 1GHz 10MHz
For the EMS test the 527.04 must be configured and the sensor data must be read out via SPI. This can be done,
for example, by an external microcontroller.
The basic EMS test sequence during RF irradiation runs as follows:
1. Configure the ASSP for the demanded measurement mode.
2. Wait on rising edge of DAV signal for new measurement value at pin WS.
3. Read out result register value.
4. Evaluate result register value with status flags.
5. Go back to step 2.
The ALS interface is temperature sensitive. It could be that the ASSP heats up during the EMS test and thus the
ALS result value drifts away. In order to prevent this, an optional cyclic ALI calibration as described in chapter 6.6.2
can be made.
Evaluation criteria for EMS test are listed in 7.2-2.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
74 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 7.2-2: Evaluation Criteria for EMS Test
Item Register, Function Related Register, Flag Tolerance,
or Signal Behaviour
1 Periodic rising edge (positive pulse) of DAV signal for a Signal: DAV regular occurrence of
new measurement value at pin WS. DAV pulse
2 Rain sensor signal without disturbance ("no rain"). The Register: RSIVAL deviation not more
RSI measurement value from RSI result register than +/-24LSB
RSIVALH and RSIVALL is evaluated when a RSI mode is
selected.
3 Ambient light sensor signal at sun light. The sun light is Register: ALSVALx or deviation not more
simulated with a constant artificial light that generates an RSIVAL than +/-15LSB
ALS photo diode current of about 100µA. The ALS meas-
urement value from ALS registers or ADC result registers
is evaluated when an ALS mode is selected.
4 The flag INVALID or CHN_INVALID of the result Flag: INVALID / -
registers. When the flag is read out positive up to 9 times CHN_INVALID
in a row, the old RSI or ALS result value is valid. If the
flag is read out positive 10 times in a row, the RSI or ALS
result value is set to 0LSB.
5 The flag LED_WARN of the result registers. When the Flag: LED_WARN -
flag is read out positive up to 9 times in a row, the old RSI
or ALS result value is valid. If the flag is read out positive
10 times in a row, the RSI or ALS result value is set to
0LSB.
6 The flag ERROR of the result registers. When the flag is Flag: ERROR -
read out positive up to 9 times in a row, the old RSI or
ALS result value is valid. If the flag is read out positive 10
times in a row, the RSI or ALS result value is set to 0LSB.
7.2.1 Conducted EMS for Module Supply
Conducted susceptibility will be measured for pins LEDA and LEDB according to IEC 62132-4 (DPI-Method). The
measurement circuit is shown in 7.2.1-1. The decoupling network for the supply VBAT is only shown in principle as
the sub-block "VBAT decoupling network". 7.1.1-2 shows the sub-block in detail.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
75 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
VBAT
VBAT DVLED CVLED1 CVLED2
decoupling CVSUP BAS521 100nF 22µF
ZVSUP
network 100nF
13.5V
DVS CVS1 CVS2
SMAJ36CA RWAKE_N
BAS521 100nF 22µF
GND 33kΩ
Module RVBAT CVBAT
supply 47Ω 47nF
CVDD
CVDDA
CVDDD
6.8nF 10µF 220nF LEDA LEDB
220nF SFH420 SFH420
VBAT VS WAKE_N VDD VDDA VDDD
ATB
WDOSC TMODE
Pforward 50Ω RW DOSC RA
100kΩ WDDM LEDA
0Ω
GNDL RB
RF LEDB
0Ω
generator RS
PDRS
SFH2400FA
E520.34 E527.04 VREF
CVREF
1nF PDALS3
LIN TEMD6200FX
ALS3 PDALS2
ALS2 PDALS1
GND
ALS1 PDALS0
DIV_ON
RES_N
WDIN
ALS0
MOSI
MISO
RXD
SCK
TXD
WS
EN
CS
PV
GND GNDD GNDA
GPIO
SPI
GPIO
GPIO
GPIO
SPI
SPI
SPI
RESET_N
LIN
LIN
ADC_IN
µC
GND
External microcontroller
Figure 7.2.1-1: Conducted EMS measurement circuit
The conducted EMS limit line is shown in 7.2.1-2. The start level for this test is 36dBm.
36
33
Forward power [dBm]
30
27
24
21
18
15
12
0.1 1 10 100 1000
Frequency [MHz]
Figure 7.2.1-2: Limit Line for Conducted EMS
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
76 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
8 Package Reference
The E527.04 is available in a Pb free, RoHs compliant, QFN20L4 plastic package according to JEDEC MO-220
VGGD-5. The package is classified to Moisture Sensitivity Level 2 (MSL 3) according to JEDEC J-STD-MO-220-K.
Figure 8-1: Package Dimensions
Note 1: Contact factory for specific location and type of pin 1 identification.
Table 8-1: Package Characteristics
Description Symbol mm inch
min typ max min typ max
Package height A 0.80 0.90 1.00 0.031 0.035 0.039
Stand off A1 0.00 0.02 0.05 0.00 0.00079 0.002
Thickness of terminal leads, including lead A3 -- 0.20 -- -- 0.0079 --
finish REF REF
Width of terminal leads b 0.18 0.25 0.30 0.007 0.0098 0.012
Package length / width D/E -- 4.00 -- -- 0.157 --
BSC BSC
Length /width of exposed pad D2 / E2 2.50 2.65 2.80 0.098 0.104 0.110
Lead pitch e -- 0.5 BSC -- -- 0.020 --
BSC
Length of terminal for soldering to sub- L 0.35 0.40 0.45 0.014 0.016 0.018
strate
Number of terminal positions N 20 20
Note: The mm values are valid, the inch values contain rounding errors.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
77 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Table 8-2: Thermal Ratings of QFN20L4 Package
No. Description Symbol Value Unit
1 Typical thermal resistance (junction to air) of QFN20L4 package RTH,JA 45 K/W
based on JEDEC standards:
• JESD-51-2 (still air)
• JESD-51-5 (exposed pad (EDP) soldered to PCB with
thermal via's)
• JESD-51-7 (4-layer PCB)
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
78 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
9 Marking
9.1 Top Side
Table 9.1-1: Top Side
52704A
XXXXU
YWW*#
Table 9.1-2: Marking of the Devices
Signature Explanation
52704 ELMOS product number
A ELMOS product revision code
XXXX Production lot number
U Assembler code
YWW Year and week of assembly
* Mask revision code
# ELMOS internal code
9.2 Bottom Side
No marking.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
79 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
10 Typical Applications
Typical automotive application example as rain and light sensor module with LIN interface. For that example a LIN
SBC and a microcontroller are necessary. However, other applications are possible without LIN SBC.
VBAT
CVLED1 CVLED2
DVLED
CVSUP ZVSUP
CVS1 CVS2
DVS
RWAKE_N
GND RVBAT CVBAT
CVDD CVDDA CVDDD
LEDA LEDB
VBAT VS WAKE_N VDD VDDA VDDD
ATB
WDOSC TMODE RA
RWDOSC
WDDM LEDA
GNDL RB
LEDB
RS
PDRS/LEDRS
E520.34 E527.04 VREF
CVREF
LIN Bus XLIN PDALS3
LIN
pin2 24V ALS3 PDALS2
ZPESD1LIN CLIN2 CLIN1
ALS2 PDALS1
pin1 15V
GND
ALS1 PDALS0
DIV_ON
RES_N
WDIN
ALS0
MOSI
MISO
RXD
SCK
TXD
WS
EN
CS
PV
GND GNDD GNDA
CVDDuC
GPIO
ADC_IN
RESET_N
LIN
LIN
GPIO
GPIO
GPIO
SPI
SPI
SPI
SPI
VDD
µC
GND
Figure 10-1: Typical Application Example
Table 10-1: External Components
Symbol Value Unit Description
CVSUP 68-100 nF ESD blocking capacitor, place near module connector.
ZVSUP 43 V Transient Voltage Suppressor (TVS) diode against over voltage spikes (ESD
protection and ISO pulses), e.g. SMAJ36CA or P4SMA43C(A). Place near
module connector.
DVLED, DVS Reverse polarity protection diode, e.g. BAS521.
RVBAT 47 Ω ESD protection resistor
CVLED1 100 nF Blocking capacitor
CVLED2 22 µF Capacitor to flatten LED current pulses. The value depends on the RSI mode,
the LED current setting, and the customer requirements for maximum current
pulses on the supply line. Therefore value could be smaller.
Also tank capacitor to supply LEDs during short disconnection of supply wire.
CVS1 100 nF Blocking capacitor, place near pin VS of E520.34.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
80 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Symbol Value Unit Description
CVS2 min. 22 µF Blocking capacitor against ISO Pulse 2A. In conjunction with TVS diode
ZVSUP smaller values are possible.
Also tank capacitor to supply circuit during short disconnection of supply wire.
Max. autarky (disconnection) time with min. specified VBAT voltage VBATMIN
can be calculated with:
tautarky = CVS2 * (VBATMIN - VD_VS - VS,FUNC MIN) / IVS.
VD_VS is the voltage of diode DVS.
IVS is the current into pin VS.
VS,FUNC MIN is the minimum specified functional range of supply voltage VS.
CVBAT 47 nF ESD protection capacitor
RWAKE_N 33 kΩ ESD protection pull up resistor
CVDDA 220 nF Blocking capacitor, place near pin VDDA.
CVDDD 220 nF Blocking capacitor, place near pin VDDD.
CVDD 10 µF Buffer capacitor for pin VDD of E520.34.
CVDDuC Blocking capacitor for µC supply, value depends from µC, place near µC sup-
ply pin.
RWDOSC Configures the watchdog cycle time of E520.34.
LEDA, LEDB SFH4250, SFH4253, SFH4243, VSMF9700, VSMF3710, VSMY1940ITX01 or
similar types, 1 to 4 LEDs per strand recommended. Number of LEDs depends
on the optical system, the demanded area of rain detection and the LED supply
voltage.
R A, R B Optional series resistor to reduce power dissipation of 527.04 LED driver, min.
voltage at pins LEDA and LEDB is 0.8V.
PDRS/LEDRS SFH2400FA, TEMD7100 or similar types. It is also possible to use the same
LED type as photo diode like the sending LEDs. But the LEDs are usually not
specified as photo diode. Therefore this characteristic is not guaranteed. Capa-
citance should not be more than 35pF. Place near pin RS and VREF. Net RS is
a very sensitive node and should be as short as possible. Parallel to net RS the
net VREF should be routed. It is recommended to shield RS net with GND
planes against RF irradiation.
PDALSx SFH2400, SFH2270R, BPW34, TEMD5020, TEMD6010, TEMD6200,
TEMD7000, VBP104 or similar types, capacitance should not be more than
70pF. Nets ALSx are very sensitive nodes and should be as short as possible.
Parallel to nets ALSx the net VREF should be routed. It is recommended to
shield ALSx nets with GND planes against RF irradiation.
CVREF 1 nF VREF Blocking capacitor, place near pin VREF. It is recommended to shield
VREF net with GND planes against RF irradiation.
CLIN1 220/180 pF 220pF if CLIN2 and PESD1LIN is not used, 180pF if CLIN2 and PSD1LIN is used. By LIN
specification the whole capacitance of LIN terminal should be 220pF.
XLIN 0Ω Resistor or optional ferrite to suppress distortion from micro-controller.
CLIN2 Optional capacitor if demanded by OEM.
ZPESD1LIN 15/24 V Optional LIN-bus ESD protection diode PESD1LIN for increased ESD require-
ments of 8KV. Place near LIN Bus connector.
E520.34 ELMOS E520.34 LIN SBC with voltage regulator or similar types.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
81 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
11 General
11.1 WARNING - Life Support Applications Policy
ELMOS Semiconductor AG is continually working to improve the quality and reliability of its products. Nevertheless,
semiconductor devices in general can malfunction or fail due to their inherent electrical sensitivity and vulnerability
to physical stress. It is the responsibility of the buyer, when utilizing ELMOS Semiconductor AG products, to
observe standards of safety, and to avoid situations in which malfunction or failure of an ELMOS Semiconductor
AG Product could cause loss of human life, body injury or damage to property. In development your designs,
please ensure that ELMOS Semiconductor AG products are used within specified operating ranges as set forth in
the most recent product specifications.
11.2 General Disclaimer
Information furnished by ELMOS Semiconductor AG is believed to be accurate and reliable. However, no respons-
ibility is assumed by ELMOS Semiconductor AG for its use, nor for any infringements of patents or other rights of
third parties, which may result from its use. No license is granted by implication or otherwise under any patent or
patent rights of ELMOS Semiconductor AG. ELMOS Semiconductor AG reserves the right to make changes to this
document or the products contained therein without prior notice, to improve performance, reliability, or manufactur-
ability .
11.3 Application Disclaimer
Circuit diagrams may contain components not manufactured by ELMOS Semiconductor AG, which are included as
means of illustrating typical applications. Consequently, complete information sufficient for construction purposes is
not necessarily given. The information in the application examples has been carefully checked and is believed to be
entirely reliable. However, no responsibility is assumed for inaccuracies. Furthermore, such information does not
convey to the purchaser of the semiconductor devices described any license under the patent rights of ELMOS
Semiconductor AG or others.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
82 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
12 Contact Info
Table 12-1: Contact Information
Headquarters +492317549100 sales@elmos.de www.elmos.de
ELMOS Semiconductor AG
Heinrich-Hertz-Str. 1,
44227 Dortmund (Germany)
Sales and Application Support Office North +12488653200 sales-usa@elmos.com
America
Elmos NA. Inc.
32255 Northwestern Highway, Suite 220
Farmington Hills, MI 48334 (United States)
Sales and Application Support Office Korea +82317141131 sales-korea@elmos.com
Elmos Korea Co, Ltd.
B-1006, U-Space 2, 670 Daewangpangyo-ro,
Sampyoung-dong, Bundang-gu, Seongnam-si,
Gyeonggi-do, 13494 Korea
Sales and Application Support Office Japan +81334517101 sales-japan@elmos.com
Elmos Japan K.K.
BR Shibaura N Bldg. 7F
3-20-9 Shibaura, Minato-ku,
Tokyo 108-0023 Japan
Sales and Application Support Office China +862162197502 sales-china@elmos.com
Elmos Semiconductor Technology (Shanghai)
Co., Ltd.
Unit 16B, 16F Zhao Feng World Trade Building,
No. 369 Jiang Su Road,
Chang Ning District,
Shanghai, PR China, 200050
Sales and Application Support Office +6569081261 sales-singapore@elmos.com
Singapore
Elmos Semiconductor Singapore Pte Ltd.
3A International Business Park,
1. 09-13 ICON@IBP, Singapore 609935
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
83 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
13 Contents
Table of Content
Features.........................................................................................................................................................................1
Applications...................................................................................................................................................................1
General Description.......................................................................................................................................................1
Ordering Information......................................................................................................................................................1
Typical Operating Circuit...............................................................................................................................................1
Functional Diagram........................................................................................................................................................2
Pin Configuration QFN20L4..........................................................................................................................................2
Pin Description QFN20L4..............................................................................................................................................3
1 Functional Safety........................................................................................................................................................4
2 Absolute Maximum Ratings........................................................................................................................................5
3 ESD.............................................................................................................................................................................6
4 Recommended Operating Conditions........................................................................................................................7
5 Electrical Characteristics............................................................................................................................................8
5.1 Overview.............................................................................................................................................................8
5.2 Supply Monitor....................................................................................................................................................8
5.3 References.........................................................................................................................................................9
5.4 Temperature Sensor .........................................................................................................................................9
5.5 Oscillator.............................................................................................................................................................9
5.6 Ambient Light Interface (ALI)............................................................................................................................10
5.7 Rain Sensor Interface (RSI).............................................................................................................................11
5.8 LED Driver........................................................................................................................................................11
5.9 Digital Control...................................................................................................................................................12
5.10 Digital Signal Processing................................................................................................................................12
5.10.1 Rain sensor data processing..................................................................................................................12
5.11 Serial Peripheral Interface (SPI)....................................................................................................................13
6 Functional Description .............................................................................................................................................14
6.1 Overview...........................................................................................................................................................14
6.1.1 Rain Sensor Interface..............................................................................................................................14
6.1.2 Ambient Light Interface............................................................................................................................15
6.2 Supply Monitor..................................................................................................................................................16
6.2.1 Power-up and -down Timing Diagram.....................................................................................................18
6.3 References.......................................................................................................................................................19
6.4 Temperature Sensor .......................................................................................................................................20
6.5 Oscillator...........................................................................................................................................................20
6.6 Ambient Light Interface (ALI)............................................................................................................................21
6.6.1 Deviations from logarithmic transfer characteristic..................................................................................22
6.6.2 Calibration................................................................................................................................................24
6.6.2.1 Calibration during operation: VREF, VINC, VALI,OS......................................................................25
6.6.2.2 Calibration during operation: gain coefficient...................................................................................26
6.6.2.3 Calibration during End of Line Test.................................................................................................26
6.6.3 Diagnosis..................................................................................................................................................26
6.6.3.1 Short Circuit Diagnosis....................................................................................................................26
6.6.3.2 Current Diagnosis............................................................................................................................28
6.7 Rain Sensor Interface (RSI).............................................................................................................................29
6.7.1 RSI Modes................................................................................................................................................30
6.7.1.1 RSI0 - Relative Mode.......................................................................................................................31
6.7.1.2 RSI1 - Differential Mode...................................................................................................................33
6.7.1.3 RSI2 - Alternative Relative Mode.....................................................................................................34
6.7.2 Coupling Factor Measurement.................................................................................................................35
6.7.3 Indirect Absolute Value Measurement.....................................................................................................36
6.7.4 Phase Delay Configuration......................................................................................................................37
6.8 LED Driver........................................................................................................................................................38
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
84 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
6.9 Digital Control...................................................................................................................................................38
6.9.1 Reset........................................................................................................................................................40
6.9.2 Idle Mode..................................................................................................................................................40
6.9.3 Manual/Burst measurement mode...........................................................................................................40
6.9.4 Automatic measurement mode................................................................................................................41
6.9.5 Coupling Factor measurement mode.......................................................................................................42
6.9.6 Overtemperature Mode............................................................................................................................42
6.9.7 Sleep Mode..............................................................................................................................................43
6.9.8 Digital Control Register............................................................................................................................43
6.10 Digital Signal Processing................................................................................................................................57
6.10.1 Rain sensor data processing..................................................................................................................58
6.10.2 ADC based measurement......................................................................................................................59
6.10.3 WS Output Function...............................................................................................................................60
6.11 Serial Peripheral Interface (SPI)....................................................................................................................61
6.11.1 SPI Format.............................................................................................................................................61
6.11.1.1 8 bit commands..............................................................................................................................64
6.11.1.2 Write commands............................................................................................................................66
6.11.1.3 Read commands............................................................................................................................68
6.11.2 SPI Commands......................................................................................................................................70
7 EMC - Electromagnetic Compatibility.......................................................................................................................72
7.1 EME - Electromagnetic Emission.....................................................................................................................72
7.1.1 Conducted EME for Module Supply.........................................................................................................73
7.2 EMS - Electromagnetic Susceptibility..............................................................................................................74
7.2.1 Conducted EMS for Module Supply.........................................................................................................75
8 Package Reference..................................................................................................................................................77
9 Marking.....................................................................................................................................................................79
9.1 Top Side...........................................................................................................................................................79
9.2 Bottom Side......................................................................................................................................................79
10 Typical Applications................................................................................................................................................80
11 General...................................................................................................................................................................82
11.1 WARNING - Life Support Applications Policy................................................................................................82
11.2 General Disclaimer.........................................................................................................................................82
11.3 Application Disclaimer....................................................................................................................................82
12 Contact Info............................................................................................................................................................83
13 Contents.................................................................................................................................................................84
Illustration Index
Figure 6.1-1: Simplified functional diagram.................................................................................................................14
Figure 6.1.1-1: Principal signals without water drops..................................................................................................14
Figure 6.1.1-2: Principal signals with water drops.......................................................................................................15
Figure 6.2-1: Block Diagram of Supply Monitor and Reset Generation......................................................................16
Figure 6.2.1-1: Power Timing Diagram.......................................................................................................................18
Figure 6.3-1: Block Diagram of References................................................................................................................19
Figure 6.4-1: Block Diagram of Temperature Sensor.................................................................................................20
Figure 6.5-1: Block Diagram of Oscillator....................................................................................................................20
Figure 6.6-1: Block Diagram of ALI.............................................................................................................................21
Figure 6.6.1-1: Deviations for low input currents.........................................................................................................23
Figure 6.6.1-2: Deviations for high input currents.......................................................................................................23
Figure 6.6.2-1: Example for ALI measurement error with and without calibration......................................................25
Figure 6.7-1: Block Diagram of RSI.............................................................................................................................29
Figure 6.7.1.1-1: Characteristic curve of RSI0 mode..................................................................................................31
Figure 6.7.1.2-1: Characteristic curve of RSI1 mode..................................................................................................34
Figure 6.7.1.3-1: Characteristic curve of RSI2 mode..................................................................................................35
Figure 6.7.4-1: RSI1 result value as a function on phase delay setting......................................................................38
Figure 6.9-1: Main state diagram.................................................................................................................................39
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
85 / 86
Rain and Light Sensor 527.04
PRODUCT DATA SHEET – May 15, 2017
Figure 6.10.1-1: The RSI measurement unit...............................................................................................................58
Figure 6.10.2-1: The ADC measurement unit.............................................................................................................59
Figure 6.11-1: SPI Timing Diagram.............................................................................................................................61
Figure 6.11.1-1: Bit echoing and status.......................................................................................................................63
Figure 6.11.1-2: Read byte and parity.........................................................................................................................64
Figure 6.11.1.1-1: 8-Bit command with parity..............................................................................................................65
Figure 6.11.1.1-2: 8-Bit command without parity........................................................................................................66
Figure 6.11.1.2-1: Write byte command with parity.....................................................................................................67
Figure 6.11.1.2-2: Write byte without parity.................................................................................................................68
Figure 6.11.1.3-1: Read byte command......................................................................................................................69
Figure 6.11.1.3-2: Read word command.....................................................................................................................70
Figure 7.1.1-1: Conducted EME measurement circuit................................................................................................73
Figure 7.1.1-2: VBAT decoupling network schematic.................................................................................................73
Figure 7.1.1-3: Limit Line for conducted EME.............................................................................................................74
Figure 7.2.1-1: Conducted EMS measurement circuit................................................................................................76
Figure 7.2.1-2: Limit Line for Conducted EMS............................................................................................................76
Figure 8-1: Package Dimensions................................................................................................................................77
Figure 10-1: Typical Application Example...................................................................................................................80
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-No. 25DS5274E.01
86 / 86
You might also like
- HP Compaq 6510B SchematicsDocument60 pagesHP Compaq 6510B SchematicsBociu TitusNo ratings yet
- AD5172BRM10 Rab 10k Ohm - 40°C To +125°C 10-Lead MSOP RM-10 D0VDocument28 pagesAD5172BRM10 Rab 10k Ohm - 40°C To +125°C 10-Lead MSOP RM-10 D0VJalal AsadianNo ratings yet
- 3 - Ch. LED Driver For Illumination: Features DescriptionDocument35 pages3 - Ch. LED Driver For Illumination: Features DescriptionSebastian IgnacioNo ratings yet
- ISL6263C IntersilDocument18 pagesISL6263C IntersilCer CerNo ratings yet
- REN Isl29501 DST 20220317Document23 pagesREN Isl29501 DST 20220317aNo ratings yet
- RTD CurcitDocument7 pagesRTD Curcitparmarhitesh0201197No ratings yet
- Designing The VEML6070 UV Light Sensor Into Applications: Optical SensorsDocument14 pagesDesigning The VEML6070 UV Light Sensor Into Applications: Optical SensorsLjubisa DjordjevicNo ratings yet
- Ad7817 7818Document20 pagesAd7817 7818congwem qinNo ratings yet
- ISL6314Document32 pagesISL6314SURESH CHANDRA ROUTNo ratings yet
- 256-Position, One-Time Programmable, Dual-Channel, I C Digital PotentiometersDocument28 pages256-Position, One-Time Programmable, Dual-Channel, I C Digital PotentiometersMhb AliloNo ratings yet
- BOSCH CJ135 Product Information 101201Document2 pagesBOSCH CJ135 Product Information 101201Wang Zheng Feng100% (1)
- Thermal Sensor With SPI Interfa: Features DescriptionDocument22 pagesThermal Sensor With SPI Interfa: Features DescriptioncatalinbujdeiNo ratings yet
- Dual 256-Position I C Compatible Digital Potentiometer AD5243/AD5248Document20 pagesDual 256-Position I C Compatible Digital Potentiometer AD5243/AD5248jose david bermudez perezNo ratings yet
- CMOS, Low Voltage Serially Controlled, Octal SPST Switches: 2.5 V Dual Supply On Resistance On Resistance FlatnessDocument16 pagesCMOS, Low Voltage Serially Controlled, Octal SPST Switches: 2.5 V Dual Supply On Resistance On Resistance Flatnesstzf32799No ratings yet
- AD5241BRZ10 Potenţiometre DigitaleDocument18 pagesAD5241BRZ10 Potenţiometre DigitaleFaulhaber AdrianNo ratings yet
- 12bits Serie SPI AdcDocument34 pages12bits Serie SPI Adclucas_guerrero2No ratings yet
- IDT ZMID520x Short Form Datasheet SDS 20170524Document2 pagesIDT ZMID520x Short Form Datasheet SDS 20170524dineshNo ratings yet
- Main Features: - Set-Top-Boxes - White Goods - Home Appliances - DVD Players and VcrsDocument25 pagesMain Features: - Set-Top-Boxes - White Goods - Home Appliances - DVD Players and VcrsDhivya NNo ratings yet
- CFS.2300+Datasheet+Rev1.9 2018Document24 pagesCFS.2300+Datasheet+Rev1.9 2018BryanNo ratings yet
- AD9225Document25 pagesAD9225rakibul hasanNo ratings yet
- AD7819Document12 pagesAD7819IrvinRamAltNo ratings yet
- Polyphase Energy Metering IC With Pulse Output ADE7752/ADE7752ADocument1 pagePolyphase Energy Metering IC With Pulse Output ADE7752/ADE7752ABárbara ConstanzaNo ratings yet
- Datasheet Isl6262Document27 pagesDatasheet Isl6262Jhones CAMNo ratings yet
- CMOS, 2.5 Triple/Quad SPDT Switches: Low VoltageDocument12 pagesCMOS, 2.5 Triple/Quad SPDT Switches: Low VoltageAsep TatangNo ratings yet
- K Type Thermocouple Meseurement Circuit With Precision ADCDocument9 pagesK Type Thermocouple Meseurement Circuit With Precision ADCmehdi.bzinebNo ratings yet
- 03 Ads9227Document55 pages03 Ads9227CHAMOUXNo ratings yet
- CN 0346Document7 pagesCN 0346smokeiiotNo ratings yet
- CN0303Document6 pagesCN0303FabioDangerNo ratings yet
- Adns-7550 2007Document32 pagesAdns-7550 2007decaedron decaedrumNo ratings yet
- RF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1Document19 pagesRF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1bulli babuNo ratings yet
- Circuit Note: IEPE-Compatible Interface For Wideband MEMS Accelerometer SensorsDocument6 pagesCircuit Note: IEPE-Compatible Interface For Wideband MEMS Accelerometer SensorsLuis CaballeroNo ratings yet
- Low-Voltage, 10-Bit Digital Temperature Sensor in 8-Lead: SoicDocument8 pagesLow-Voltage, 10-Bit Digital Temperature Sensor in 8-Lead: SoicendersonNo ratings yet
- 6-Channel Visible Spectral - ID Device With Electronic Shutter and Smart InterfaceDocument48 pages6-Channel Visible Spectral - ID Device With Electronic Shutter and Smart InterfaceHowTo HackNo ratings yet
- V02 0409en - DS - HCPL 7860 - 2015 03 061 908727Document18 pagesV02 0409en - DS - HCPL 7860 - 2015 03 061 908727Shirley CastañedaNo ratings yet
- Map3511 828Document14 pagesMap3511 828riyad abdulhafeedNo ratings yet
- Isl 6561Document27 pagesIsl 6561PristisNo ratings yet
- Adg728 729-1502949 PDFDocument14 pagesAdg728 729-1502949 PDFJosé Arnaldo SilvaNo ratings yet
- Icne 2521 DDocument7 pagesIcne 2521 Dfraustro2No ratings yet
- SC 2595Document12 pagesSC 2595Stelian DobreNo ratings yet
- 3-Axis Magnetic Sensor QMC5883L: Features BenefitDocument9 pages3-Axis Magnetic Sensor QMC5883L: Features BenefitNMR Digital Service Center Naveen NMRNo ratings yet
- MAX86916 Integrated Optical Sensor Module For Mobile Health: General Description Benefits and FeaturesDocument40 pagesMAX86916 Integrated Optical Sensor Module For Mobile Health: General Description Benefits and Featuresmaria jose rodriguez lopezNo ratings yet
- MAP3511Document14 pagesMAP3511Дмитрий КопышевNo ratings yet
- AS8002 Datasheet en v1Document25 pagesAS8002 Datasheet en v1Anonymous eCmTYonQ84No ratings yet
- +2.7 V To +5.5 V, 350 KSPS, 10-Bit 4-/8-Channel Sampling AdcsDocument1 page+2.7 V To +5.5 V, 350 KSPS, 10-Bit 4-/8-Channel Sampling AdcsAntonio HerreraNo ratings yet
- ADE7912 - 7913 DatasheetDocument41 pagesADE7912 - 7913 Datasheetalbert.sureda.spamNo ratings yet
- 2 SIC9231SE EN Rev1.0Document6 pages2 SIC9231SE EN Rev1.0Vishal dtuNo ratings yet
- MAP3512Document15 pagesMAP3512KhalidNo ratings yet
- AD7892 - LC2MOS Single Supply, 12-Bit 600 KSPS ADCDocument14 pagesAD7892 - LC2MOS Single Supply, 12-Bit 600 KSPS ADCJavierPariNo ratings yet
- Obsolete: Low Cost Accelerometers With Digital Output ADXL202/ADXL210Document11 pagesObsolete: Low Cost Accelerometers With Digital Output ADXL202/ADXL210adfumegaNo ratings yet
- 12-V Voltage Sensing Circuit With An Isolated AmplifierDocument8 pages12-V Voltage Sensing Circuit With An Isolated AmplifierSirJones KekapohNo ratings yet
- ADS8864Document51 pagesADS8864docNo ratings yet
- AD7927Document28 pagesAD7927karoNo ratings yet
- SC6122Document14 pagesSC6122MarocanuMargoNo ratings yet
- TPS8804 Smoke Detector AFE: 1 Features 2 ApplicationsDocument57 pagesTPS8804 Smoke Detector AFE: 1 Features 2 ApplicationsmotaNo ratings yet
- Signal and Power Isolated RS-485 Transceiver With 15 KV ESD ProtectionDocument22 pagesSignal and Power Isolated RS-485 Transceiver With 15 KV ESD ProtectionAndryasDoniIraniNo ratings yet
- Mcp3021a0t-E OtDocument26 pagesMcp3021a0t-E OtVinícius Vasconcelos Do RêgoNo ratings yet
- Agm 1602W-818Document23 pagesAgm 1602W-818Daniel BauerNo ratings yet
- SP14N02L6ALCZ: Customer'S Acceptance SpecificationsDocument22 pagesSP14N02L6ALCZ: Customer'S Acceptance Specificationsjohnbad36No ratings yet
- ADu M3154Document22 pagesADu M3154Sunil Kumar ThakurNo ratings yet
- Analog Dialogue Volume 46, Number 1: Analog Dialogue, #5From EverandAnalog Dialogue Volume 46, Number 1: Analog Dialogue, #5Rating: 5 out of 5 stars5/5 (1)
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- BOOSTXL-DRV8323Rx EVM User's GuideDocument28 pagesBOOSTXL-DRV8323Rx EVM User's GuideJ. Carlos RGNo ratings yet
- AK3918AV100 Series Processors Feature List: Revision: 1.4.0 09/2022Document4 pagesAK3918AV100 Series Processors Feature List: Revision: 1.4.0 09/2022pa.22226499No ratings yet
- Ads 131 A 02Document93 pagesAds 131 A 02dhanabal rNo ratings yet
- Electronic Protection To Exam Paper Leakage IJERTV2IS50588Document7 pagesElectronic Protection To Exam Paper Leakage IJERTV2IS50588AMal MpNo ratings yet
- Artasie AM18X5 RTC DatasheetDocument89 pagesArtasie AM18X5 RTC DatasheetJorge LealNo ratings yet
- Adet S A0006353185 1-2956540Document63 pagesAdet S A0006353185 1-2956540ManunoghiNo ratings yet
- 8-Channel, High Throughput, 24-Bit Sigma-Delta ADC: Data SheetDocument32 pages8-Channel, High Throughput, 24-Bit Sigma-Delta ADC: Data SheetPravin RautNo ratings yet
- DatasheetDocument23 pagesDatasheetWILMER GUTIERREZNo ratings yet
- Install Powerdb 11.2 08FEB19Document49 pagesInstall Powerdb 11.2 08FEB19Jesus R. Argollo EspejoNo ratings yet
- MX25L25635F, 3V, 256Mb, v1.2Document108 pagesMX25L25635F, 3V, 256Mb, v1.2yo manNo ratings yet
- Basys 3 ™ FPGA Board Reference Manual: Revised March 23, 2017 This Manual Applies To The Basys 3 Rev. CDocument19 pagesBasys 3 ™ FPGA Board Reference Manual: Revised March 23, 2017 This Manual Applies To The Basys 3 Rev. CrickymoraNo ratings yet
- PIC18F27 47 57Q84 Data Sheet 40002213DDocument1,146 pagesPIC18F27 47 57Q84 Data Sheet 40002213DGuilherme Leite JSNo ratings yet
- MAX86140/ MAX86141 Best-in-Class Optical Pulse Oximeter and Heart-Rate Sensor For Wearable HealthDocument90 pagesMAX86140/ MAX86141 Best-in-Class Optical Pulse Oximeter and Heart-Rate Sensor For Wearable Healthmaria jose rodriguez lopezNo ratings yet
- Real Time Bridge Monitoring and Alert Generation System Using IotDocument4 pagesReal Time Bridge Monitoring and Alert Generation System Using Iotvishalmate10No ratings yet
- Intel Core I7 PDFDocument73 pagesIntel Core I7 PDFReal MastercraFTNo ratings yet
- STM 32 G 061 C 6Document126 pagesSTM 32 G 061 C 6AlexNo ratings yet
- Jumo Dtrans T03 J, B, T Analog 2-Wire Transmitter With Digital Adjustment Jumo Dtrans T03 Bu, Tu Analog 3-Wire Transmitter With Digital AdjustmentDocument10 pagesJumo Dtrans T03 J, B, T Analog 2-Wire Transmitter With Digital Adjustment Jumo Dtrans T03 Bu, Tu Analog 3-Wire Transmitter With Digital AdjustmentDavid Leonardo Galindo ToapantaNo ratings yet
- MSP 430 DatasheetDocument78 pagesMSP 430 DatasheetKarthik AnanthamNo ratings yet
- 2107 FBDocument32 pages2107 FBdeshonNo ratings yet
- Arrow 0909 Live PPT PDFDocument57 pagesArrow 0909 Live PPT PDFปฏิวัติ ชาติดํารงค์No ratings yet
- Internet of Things Technology 15CS81Document44 pagesInternet of Things Technology 15CS81ArunNo ratings yet
- BEE 049 - Design of Embedded System PDFDocument95 pagesBEE 049 - Design of Embedded System PDFSubhamNo ratings yet
- Unit - 1 IntroductionDocument67 pagesUnit - 1 IntroductionMurali Dhara Sesha Giri Rao GoddantiNo ratings yet
- Samsung Lennon2 Lennon S R BA41 01747A, BA41 01748ADocument43 pagesSamsung Lennon2 Lennon S R BA41 01747A, BA41 01748Adata microNo ratings yet
- Internet of Things: Jarrod Trevathan, PHD, Simon Schmidtke, Wayne Read, PHD, Tony Sharp, Abdul Sattar, PHDDocument18 pagesInternet of Things: Jarrod Trevathan, PHD, Simon Schmidtke, Wayne Read, PHD, Tony Sharp, Abdul Sattar, PHDhighfive pologeeNo ratings yet
- DS2000 Firmware Release NotesDocument5 pagesDS2000 Firmware Release Notest8126No ratings yet
- MG84FG516 DataSheet A1.3 PDFDocument231 pagesMG84FG516 DataSheet A1.3 PDFpiyushpandeyNo ratings yet
- E220-900M30S UserManual EN v1.0Document14 pagesE220-900M30S UserManual EN v1.0Admir BašićNo ratings yet
- GC9307N DataSheet V1.1Document206 pagesGC9307N DataSheet V1.1SpecShareNo ratings yet