Download as docx, pdf, or txt
You might also like
- BE8255 BEEME MCQ For All UnitsDocument113 pagesBE8255 BEEME MCQ For All UnitsAzhagesvaran TamilselvamNo ratings yet
- DimensionDocument4 pagesDimensionIsaacNo ratings yet
- Theory of Vibration 5th Edition BookDocument2 pagesTheory of Vibration 5th Edition BookSaad Afzal0% (1)
- Preface For The Power SystemsDocument16 pagesPreface For The Power SystemsSaket Tirpude20% (5)
- MAE 365. Flight Dynamics. Homework 2Document15 pagesMAE 365. Flight Dynamics. Homework 2AlainIslasNo ratings yet
- Ode 6Document6 pagesOde 6slovenia0526No ratings yet
- Poisson's Equation - DiscretizationDocument22 pagesPoisson's Equation - DiscretizationmarcelodalboNo ratings yet
- Analysis of Stresses in General Cross-Ply Composite Laminates Subjected To Transient VibrationDocument6 pagesAnalysis of Stresses in General Cross-Ply Composite Laminates Subjected To Transient VibrationpdhurveyNo ratings yet
- Axes Theorem For Moment of InertiaDocument4 pagesAxes Theorem For Moment of Inertiamaingimutisya21No ratings yet
- Sums of Random VariablesDocument1 pageSums of Random VariablesKylo RenNo ratings yet
- Geographically Weighted Regression Technique For Spatial Data AnalysisDocument14 pagesGeographically Weighted Regression Technique For Spatial Data AnalysisMarto BMNo ratings yet
- Mechanics by Sir Nouman Siddique PDFDocument57 pagesMechanics by Sir Nouman Siddique PDFBint E ShafiqueNo ratings yet
- Goldstein 4 6 7 26Document11 pagesGoldstein 4 6 7 26bgiangre8372No ratings yet
- Pde - T6Q9Document2 pagesPde - T6Q9Bumi BumsNo ratings yet
- Tutorial 1 SolutionDocument5 pagesTutorial 1 SolutionCasimir de BonnevalNo ratings yet
- Quiz 4 Solution Summer 2023Document3 pagesQuiz 4 Solution Summer 2023laksd2302No ratings yet
- 10-701/15-781 Machine Learning Mid-Term Exam Solution: Your NameDocument12 pages10-701/15-781 Machine Learning Mid-Term Exam Solution: Your NameProfessor, CSE Veltech, ChennaiNo ratings yet
- EM II Unit 4 Q.B. Solved CartesianDocument10 pagesEM II Unit 4 Q.B. Solved CartesianParthNo ratings yet
- α ε y−´x α ε y−´x ε y−´x: The goals of the observer are thatDocument3 pagesα ε y−´x α ε y−´x ε y−´x: The goals of the observer are thatlevanduongNo ratings yet
- EP 222: Classical Mechanics Tutorial Sheet 5: SolutionDocument14 pagesEP 222: Classical Mechanics Tutorial Sheet 5: SolutionPragyaNo ratings yet
- Formula Sheet CompreDocument2 pagesFormula Sheet Compref20230406No ratings yet
- Exercise 12.10 PDFDocument5 pagesExercise 12.10 PDFArnav Vikas GargNo ratings yet
- Exercise 8: XX XX X XX XX XX X X XX XXDocument1 pageExercise 8: XX XX X XX XX XX X X XX XXhoney fatimaNo ratings yet
- Wazwaz IEch 3 S 2 S 3 P 8Document1 pageWazwaz IEch 3 S 2 S 3 P 8honey fatimaNo ratings yet
- Solutions 3Document9 pagesSolutions 3emma.ubekuNo ratings yet
- Midterm F02solnDocument14 pagesMidterm F02solnjtrttttttttttttttttttttttNo ratings yet
- Goldstein 22 15 21 23Document9 pagesGoldstein 22 15 21 23bgiangre8372No ratings yet
- SDR TSRDocument9 pagesSDR TSRmaheshNo ratings yet
- Problem Set 4 SolutionsDocument6 pagesProblem Set 4 SolutionsandrewlimjfNo ratings yet
- Notes APL101 UltDocument275 pagesNotes APL101 UltRupayan Das ChaudhuriNo ratings yet
- 1 More Dispersion: Weston Barger June 30, 2016Document6 pages1 More Dispersion: Weston Barger June 30, 2016ranvNo ratings yet
- Lab ExcerciseDocument5 pagesLab ExcerciseWeldush BrightNo ratings yet
- 2006 An Iterative Method For Solving Nonlinear Functional EquationsDocument11 pages2006 An Iterative Method For Solving Nonlinear Functional EquationsNurhanani abu bakarNo ratings yet
- Modelling Simulation 04Document23 pagesModelling Simulation 04fahmiNo ratings yet
- Linear Transformation and Rank Nullity Theorem 2 LecturesDocument32 pagesLinear Transformation and Rank Nullity Theorem 2 Lecturespratyay gangulyNo ratings yet
- Unit 2 MathematicsDocument112 pagesUnit 2 MathematicsAman Pratap SinghNo ratings yet
- Mathematical Foundations123Document22 pagesMathematical Foundations123Lohit Kumar SahooNo ratings yet
- Lecture16 PDFDocument10 pagesLecture16 PDFNindiya Mayuda PutriNo ratings yet
- Lec 4Document7 pagesLec 4Meysam GheysariNo ratings yet
- Nbody DissipativeDocument10 pagesNbody DissipativeFulana SchlemihlNo ratings yet
- Vio-Num AssignDocument5 pagesVio-Num AssignNeymaRay . comNo ratings yet
- Introduction To Kriging: To Cite This VersionDocument40 pagesIntroduction To Kriging: To Cite This VersionBreno NogueiraNo ratings yet
- Kriging Course Mnmuq2014 HalDocument40 pagesKriging Course Mnmuq2014 HalghaiethNo ratings yet
- Essential Questions For The Exam 2018, AMCS 308, Stochastic Methods in EngineeringDocument14 pagesEssential Questions For The Exam 2018, AMCS 308, Stochastic Methods in EngineeringAgustín EstramilNo ratings yet
- MIT2 017JF09 ch10Document11 pagesMIT2 017JF09 ch10Robin SinghNo ratings yet
- Ency) : Inny) Y)Document6 pagesEncy) : Inny) Y)md1nemesis1No ratings yet
- Wely's Teorem PDFDocument15 pagesWely's Teorem PDFGeta Bercaru100% (1)
- Hints and Answers of Tut 5Document2 pagesHints and Answers of Tut 5Aman SinhaNo ratings yet
- Essential Questions For The Exam 2018, AMCS 308, Stochastic Methods in EngineeringDocument20 pagesEssential Questions For The Exam 2018, AMCS 308, Stochastic Methods in EngineeringAgustín EstramilNo ratings yet
- The Gibbs Sampler: FunctionDocument1 pageThe Gibbs Sampler: FunctionDarwin GutierrezNo ratings yet
- Geometry: Change of AxesDocument16 pagesGeometry: Change of AxesSilvaSunnyNo ratings yet
- Chapter 5. Two-Dimensional Finite Elements: Plane Stress (Thin Members) Out-Of-Plane Normal and Shear Stress Are Zero X yDocument16 pagesChapter 5. Two-Dimensional Finite Elements: Plane Stress (Thin Members) Out-Of-Plane Normal and Shear Stress Are Zero X ysakeriraq81No ratings yet
- The Mothod of Least Squares: Satya Mandal, KU March 26, 2007Document5 pagesThe Mothod of Least Squares: Satya Mandal, KU March 26, 2007ইশতিয়াক হোসেন সিদ্দিকীNo ratings yet
- Transformation 1Document34 pagesTransformation 1Uchihaa SasukeNo ratings yet
- .Trashed 1702966745 1700328002334Document27 pages.Trashed 1702966745 1700328002334gno667533No ratings yet
- MIT2 092F09 Lec05 PDFDocument4 pagesMIT2 092F09 Lec05 PDFDanielNo ratings yet
- 1 Wave Equation On Infinite Domain: Weston Barger July 28, 2016Document12 pages1 Wave Equation On Infinite Domain: Weston Barger July 28, 2016ranvNo ratings yet
- Practice Session 2 With AnswersDocument5 pagesPractice Session 2 With AnswersMds DmsNo ratings yet
- 1 s2.0 S0377042705000439 MainDocument18 pages1 s2.0 S0377042705000439 Main青山漫步No ratings yet
- StabilityDocument35 pagesStabilitySHIVAM KUMAR SINGHWALNo ratings yet
- Joint Probability DistributionDocument47 pagesJoint Probability DistributionKiel JohnNo ratings yet
- Continuous Systems: M. SiddikovDocument18 pagesContinuous Systems: M. SiddikovPablo ÁlvarezNo ratings yet
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- SR # Opportunity Done Last Date: 1 Fauji-Fertilizer-Company-Limited-FFC-02-Dec-2018 30 January, 2019Document1 pageSR # Opportunity Done Last Date: 1 Fauji-Fertilizer-Company-Limited-FFC-02-Dec-2018 30 January, 2019NumanAbdullahNo ratings yet
- Electronic Engineer Inspector InvestigationDocument1 pageElectronic Engineer Inspector InvestigationNumanAbdullahNo ratings yet
- SR# Opportunity Done Last Date: January JobsDocument1 pageSR# Opportunity Done Last Date: January JobsNumanAbdullahNo ratings yet
- Regula Falsi Method Matlab ScriptDocument2 pagesRegula Falsi Method Matlab ScriptNumanAbdullahNo ratings yet
- Project AbstractDocument1 pageProject AbstractNumanAbdullahNo ratings yet
- AssgnDocument1 pageAssgnNumanAbdullahNo ratings yet
- PictureDocument1 pagePictureNumanAbdullahNo ratings yet
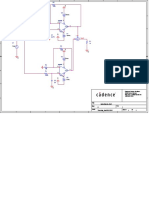
- Phase ShifterDocument7 pagesPhase ShifterNumanAbdullahNo ratings yet
- Numan Abdullah (Ddp-Sp14-Bee-025) Muhammad Haseeb (Ddp-Sp4-Bee-026) Tehseen Javaid (Ddp-Sp4-Bee-045)Document5 pagesNuman Abdullah (Ddp-Sp14-Bee-025) Muhammad Haseeb (Ddp-Sp4-Bee-026) Tehseen Javaid (Ddp-Sp4-Bee-045)NumanAbdullahNo ratings yet
- Lab Assignment 2 PDFDocument1 pageLab Assignment 2 PDFNumanAbdullahNo ratings yet
- Report Topics 1. Industrial Waste Disposal: Agrofuels and BioenergyDocument1 pageReport Topics 1. Industrial Waste Disposal: Agrofuels and BioenergyNumanAbdullahNo ratings yet
- Post Lab 4Document2 pagesPost Lab 4NumanAbdullahNo ratings yet
- Eca 2Document4 pagesEca 2NumanAbdullahNo ratings yet
- MPI Project ProposalDocument5 pagesMPI Project ProposalNumanAbdullahNo ratings yet
- Pre LabDocument1 pagePre LabNumanAbdullahNo ratings yet
- LAB 10,11 Assignment: PCM EncodingDocument3 pagesLAB 10,11 Assignment: PCM EncodingNumanAbdullahNo ratings yet
- Eca 2Document4 pagesEca 2NumanAbdullahNo ratings yet
- Sample Viva QuestionsDocument30 pagesSample Viva QuestionsNumanAbdullahNo ratings yet
- Mullers Method ProofDocument5 pagesMullers Method ProofNumanAbdullahNo ratings yet
- Answer of IKMC 2013Document1 pageAnswer of IKMC 2013NumanAbdullah100% (1)
- Lab Exp 1Document16 pagesLab Exp 1NumanAbdullah100% (1)
- Brief: Kashmir: The Geopolitical Implications & Its Impact On Regional Peace and SecurityDocument15 pagesBrief: Kashmir: The Geopolitical Implications & Its Impact On Regional Peace and SecurityNumanAbdullahNo ratings yet
- Position Maze: +getposition :dime Nsion +checkobstacle :B OoleanDocument2 pagesPosition Maze: +getposition :dime Nsion +checkobstacle :B OoleanNumanAbdullahNo ratings yet
- Megger Test Instruments For The Maintenance On Electrical Power Systems 2017Document60 pagesMegger Test Instruments For The Maintenance On Electrical Power Systems 2017rifki wahyudiNo ratings yet
- UNIT 6-PHY 131 Chapter 6 - Work and EnergyDocument53 pagesUNIT 6-PHY 131 Chapter 6 - Work and EnergycharlieNo ratings yet
- Transmission Line LoadabilityDocument3 pagesTransmission Line LoadabilityINder Dǝǝp100% (2)
- A Method For Evaluating The Hydrodynamic Added Mass in Ship Hull VibrationsDocument22 pagesA Method For Evaluating The Hydrodynamic Added Mass in Ship Hull Vibrationssqualljavier612No ratings yet
- Simulation Analysis of Fin Stabilizers On Turning Circle Control During Ship TurnsDocument9 pagesSimulation Analysis of Fin Stabilizers On Turning Circle Control During Ship TurnsnevbiralyaNo ratings yet
- Buoyant Force - AP Physics BDocument2 pagesBuoyant Force - AP Physics BajayNo ratings yet
- 1 Assignment (Kinematics) Class-XII (Question)Document2 pages1 Assignment (Kinematics) Class-XII (Question)Rahul SinghNo ratings yet
- Circuits and Electromagnetic WavesDocument8 pagesCircuits and Electromagnetic WaveslatifahNo ratings yet
- 127-Article Text-338-4-10-20200912Document9 pages127-Article Text-338-4-10-20200912Jack Alexander FadhNo ratings yet
- Waves, Sound, LightDocument27 pagesWaves, Sound, LightEmmanuella okoNo ratings yet
- Structure of Atoms (Class-11) - CompressPdf - PdfToPowerPointDocument45 pagesStructure of Atoms (Class-11) - CompressPdf - PdfToPowerPointFlowring PetalsNo ratings yet
- Design of Wideband Filter Using Split-Ring Resonator DGSDocument4 pagesDesign of Wideband Filter Using Split-Ring Resonator DGSEmad AlsurrajNo ratings yet
- Mastering Physics HW 6Document20 pagesMastering Physics HW 6ebaysellerweng0% (2)
- Current Electricity (9-16)Document8 pagesCurrent Electricity (9-16)Shyam Sundar JanaNo ratings yet
- Technial Specification - Transformer and Reactor Part 2Document10 pagesTechnial Specification - Transformer and Reactor Part 2amulya00428No ratings yet
- Teaching Ferroresonance in Power System To Undergraduate StudentsDocument11 pagesTeaching Ferroresonance in Power System To Undergraduate Studentssanela halidovicNo ratings yet
- Guide For The Application of Rogowski Coils Used For Protective Relaying Purposes - SanDiego2005Document26 pagesGuide For The Application of Rogowski Coils Used For Protective Relaying Purposes - SanDiego2005banua luhuNo ratings yet
- Balaji Et Al. - 2021 - Reduced Order Modeling For The Dynamics of JointedDocument38 pagesBalaji Et Al. - 2021 - Reduced Order Modeling For The Dynamics of JointedNidish NarayanaaNo ratings yet
- Report of Student Industrial Work Experience Scheme (Siwes) Training ProgrammeDocument45 pagesReport of Student Industrial Work Experience Scheme (Siwes) Training ProgrammeAdefila Sunday DadaNo ratings yet
- Lecture-1-Fluid PropertiesDocument41 pagesLecture-1-Fluid PropertiesMuhammad MudassirNo ratings yet
- Cse I Basic Electrical Engg. (10ele 15) NotesDocument200 pagesCse I Basic Electrical Engg. (10ele 15) NotesBala SubramanyamNo ratings yet
- ABB Watchdog Relay CW-WDSDocument4 pagesABB Watchdog Relay CW-WDSGiz999No ratings yet
- Voltage Drop GuidelinesDocument4 pagesVoltage Drop Guidelinesindira_tungNo ratings yet
- Intro MechanismsDocument54 pagesIntro Mechanismsccharp123No ratings yet
- Testing Flybacks and Yokes With The RINGER TestDocument4 pagesTesting Flybacks and Yokes With The RINGER TestS a y oNo ratings yet
- Grade 12 LM General Physics 1 Module11Document11 pagesGrade 12 LM General Physics 1 Module11Cleamarie RamirezNo ratings yet
- Hot Wheels Acceleration Lab Morse PDFDocument2 pagesHot Wheels Acceleration Lab Morse PDFapi-194762478No ratings yet