Download as pdf or txt
You might also like
- Traverse Error and Correction PDFDocument43 pagesTraverse Error and Correction PDFRajendra K Karki100% (1)
- Coordinates and TraverseDocument39 pagesCoordinates and Traversegeo_uno100% (1)
- 1 Tacheometry PDFDocument18 pages1 Tacheometry PDFJohn Mofire100% (10)
- Triangulation in SurveyingDocument6 pagesTriangulation in SurveyingShiela Mae SalesNo ratings yet
- Chapter 3 Traverse SurveyingDocument30 pagesChapter 3 Traverse SurveyingAnonymous 7VZgbKb100% (4)
- Setting Out of Horizontal CurvesDocument1 pageSetting Out of Horizontal Curvesshayhaq83% (6)
- Surveying Problems and Solutions PDF Wordpresscom - 59c51eef1723dd2b1c9e659b PDFDocument2 pagesSurveying Problems and Solutions PDF Wordpresscom - 59c51eef1723dd2b1c9e659b PDFRaymart Ruben100% (1)
- The Triangle AdjustmentDocument29 pagesThe Triangle AdjustmentWassan IdreesNo ratings yet
- Resection MethodsDocument27 pagesResection MethodsCesar Flores100% (1)
- PHYS 510 A: Mathematical Methods of Physics Homework #1 Kristin Kathleen Creech LassondeDocument35 pagesPHYS 510 A: Mathematical Methods of Physics Homework #1 Kristin Kathleen Creech LassondeKristin Kathleen Creech Lassonde100% (1)
- Lecture Notes-Module I - Lecture 1 PDFDocument7 pagesLecture Notes-Module I - Lecture 1 PDFmadhuripathakNo ratings yet
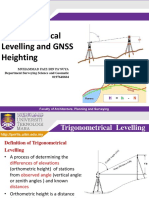
- Trigonometric LevellingDocument16 pagesTrigonometric LevellingPRITI DASNo ratings yet
- Chapter 1 CurvesDocument47 pagesChapter 1 Curvesaduyekirkosu1scribdNo ratings yet
- Levelling Mr. Vedprakash Maralapalle, Asst. Professor Department: B.E. Civil Engineering Subject: Surveying-I Semester: IIIDocument52 pagesLevelling Mr. Vedprakash Maralapalle, Asst. Professor Department: B.E. Civil Engineering Subject: Surveying-I Semester: IIIshivaji_sarvadeNo ratings yet
- Triangulation and TrilaterationDocument21 pagesTriangulation and TrilaterationQne DanielNo ratings yet
- Chapter 2 Trigonometric HeightingDocument22 pagesChapter 2 Trigonometric HeightingMuhdFikriNo ratings yet
- Chapter 5 - CurvesDocument24 pagesChapter 5 - CurvesHassan YousifNo ratings yet
- Compass Traversing: Sharfan UpaulDocument40 pagesCompass Traversing: Sharfan UpaulSumaira Majeed 09No ratings yet
- Tacheometry: Lesson 23 Basics of Tacheometry and Stadia SystemDocument20 pagesTacheometry: Lesson 23 Basics of Tacheometry and Stadia SystemMuhammed AliNo ratings yet
- Chapter Two Units of Measurements and Theory of ErrorsDocument15 pagesChapter Two Units of Measurements and Theory of Errorsyared molaNo ratings yet
- Leveling in SurveyingDocument32 pagesLeveling in SurveyingPHEBY MOOGNo ratings yet
- 09-Traverse SurveyingDocument26 pages09-Traverse SurveyingKristine DizonNo ratings yet
- Coordinate System and TraversDocument25 pagesCoordinate System and TraversAhmad Khaled100% (1)
- RankineDocument4 pagesRankineVidya SagarNo ratings yet
- Reciprocal LevellingDocument6 pagesReciprocal LevellingSuresh Sharma0% (3)
- Lecture 14Document23 pagesLecture 14Ch Muhammad YousufNo ratings yet
- Equipment List For Resection and IntersectionDocument6 pagesEquipment List For Resection and IntersectionDiegoNo ratings yet
- Theodolite Angle MeasurementDocument15 pagesTheodolite Angle MeasurementceanilNo ratings yet
- Laying Out A Curve by Deflection AngleDocument4 pagesLaying Out A Curve by Deflection AngleMopidevi Vijaya Kishore100% (1)
- Surveying Lab ManualDocument33 pagesSurveying Lab Manualhima sagarNo ratings yet
- Simple Curves or Circular Curves 04 11 2015Document124 pagesSimple Curves or Circular Curves 04 11 2015HanafiahHamzahNo ratings yet
- Advance Surveying (CE4G) Computation of AreaDocument40 pagesAdvance Surveying (CE4G) Computation of AreaChristine Joy AbricaNo ratings yet
- Three-Wire and Reciprocal LevelingDocument13 pagesThree-Wire and Reciprocal LevelingAdonis C. Bibat50% (2)
- Chain Surveying (Part 2)Document6 pagesChain Surveying (Part 2)whatever530100% (1)
- Notes Engineering SurveyDocument73 pagesNotes Engineering Surveyxai_hafeezNo ratings yet
- Chain SurveyingDocument13 pagesChain SurveyingAsharudheen Kasim100% (2)
- Chapter 3 - Measurement of Horizontal DistancesDocument28 pagesChapter 3 - Measurement of Horizontal DistancesBahaa Abou MjahedNo ratings yet
- Leveling AssignmentDocument10 pagesLeveling AssignmentYashveer020% (1)
- Control Networks As A Basis For Mapping 1. Horizontal Control NetworksDocument7 pagesControl Networks As A Basis For Mapping 1. Horizontal Control NetworksGathuita LeonNo ratings yet
- Advanced Engineering Survey: by Engr. Waqas HaroonDocument67 pagesAdvanced Engineering Survey: by Engr. Waqas HaroonWaqas HaroonNo ratings yet
- Horizontal and Vertical CurvesDocument29 pagesHorizontal and Vertical CurvesSandro SorianoNo ratings yet
- Chapter 3 - CurvesDocument46 pagesChapter 3 - CurvesAnish Pokharel100% (1)
- 8 TacheometryDocument32 pages8 TacheometryIshtiaq hussainNo ratings yet
- Contouring 2Document49 pagesContouring 2talhaskNo ratings yet
- Ceng 3182 Highway Engineering - I Mini - ProjectDocument2 pagesCeng 3182 Highway Engineering - I Mini - ProjectYefikir Sew Lpfe100% (1)
- 1.6 Area ComputationDocument37 pages1.6 Area ComputationLiyana AmaniNo ratings yet
- Survey Multiple Choice QuestionDocument12 pagesSurvey Multiple Choice QuestionHemeshpratapNo ratings yet
- Traverse ComputationsDocument11 pagesTraverse ComputationsMarc Dared Cagaoan100% (1)
- Survey - Area and VolumeDocument17 pagesSurvey - Area and VolumeSyahir Hamidon100% (1)
- C !" !! !#$"%&'!$ (#) ( (C !" !!!#$"%+&+'!$ +!%PMDocument8 pagesC !" !! !#$"%&'!$ (#) ( (C !" !!!#$"%+&+'!$ +!%PMing_nistorNo ratings yet
- SurveyingDocument63 pagesSurveyingShazrin Yusof100% (1)
- Trigonometric LevellingDocument11 pagesTrigonometric LevellingHarish T S Gowda100% (3)
- Surveying Ii (Final 31.12.2018) - 1 PDFDocument214 pagesSurveying Ii (Final 31.12.2018) - 1 PDFVicky rubanNo ratings yet
- Field Formulas: Highway EngineeringDocument39 pagesField Formulas: Highway EngineeringELGRANDENo ratings yet
- Theodolite TraversingDocument32 pagesTheodolite Traversingymanfasimf50% (2)
- 06 10 14 - IMOGeom2Document13 pages06 10 14 - IMOGeom2Atithaya Chinchalongporn100% (1)
- g11 6 TrigonometryDocument73 pagesg11 6 Trigonometryapi-235269401No ratings yet
- 3RD Term S2 MathematicsDocument31 pages3RD Term S2 MathematicsAdelowo DanielNo ratings yet
- Trigonometric Identities and Equation EngDocument33 pagesTrigonometric Identities and Equation Engchirag2796100% (1)
- Solution of Triangle Theory - EDocument14 pagesSolution of Triangle Theory - EthinkiitNo ratings yet
- Calcthreecomp PDFDocument136 pagesCalcthreecomp PDFmojarramanNo ratings yet
- Inkscape - CubeDocument3 pagesInkscape - CubeElizabeth JohnsonNo ratings yet
- Solutions 33 3Document9 pagesSolutions 33 3Smpnsatubontang KaltimNo ratings yet
- Grade 7 First Quarter Most Learned: Most and Least MasteredDocument7 pagesGrade 7 First Quarter Most Learned: Most and Least MasteredFritzNo ratings yet
- UG022527 International GCSE in Mathematics Spec A For WebDocument77 pagesUG022527 International GCSE in Mathematics Spec A For WebJohn Hopkins100% (1)
- CBSE Sample Paper Class 9 Maths Set 13Document5 pagesCBSE Sample Paper Class 9 Maths Set 13Narayanamurthy AmirapuNo ratings yet
- MathematicspdfDocument23 pagesMathematicspdfRikaz NazeerNo ratings yet
- Midterm ReviewDocument30 pagesMidterm Reviewshivam pandeyNo ratings yet
- Mat - 3r - UD3 - Plane FiguresDocument10 pagesMat - 3r - UD3 - Plane FiguresTRMariaNo ratings yet
- Matchsticks Builds HexagonDocument12 pagesMatchsticks Builds Hexagonkat suNo ratings yet
- Cbse Class 10 Mathematics Standard Sample Paper 2020 Marking Scheme PDFDocument8 pagesCbse Class 10 Mathematics Standard Sample Paper 2020 Marking Scheme PDFPranshul KapoorNo ratings yet
- Constructions PDFDocument6 pagesConstructions PDFRajesh Kumar GuptaNo ratings yet
- TrigDocument42 pagesTrigapi-509152649No ratings yet
- Math QuestionsDocument9 pagesMath QuestionsRoan Pariñas0% (1)
- 6th Mathematics All Chapters Question Paper Term-II 2011Document9 pages6th Mathematics All Chapters Question Paper Term-II 2011Parveen Dagar100% (1)
- Space and Geometry - DissertationDocument60 pagesSpace and Geometry - DissertationNeha Syal100% (1)
- Integrative Course QuizDocument2 pagesIntegrative Course QuizAndrei AlidoNo ratings yet
- Aqa-83002f-Qp-Nov21 2Document28 pagesAqa-83002f-Qp-Nov21 2Steven TsvetkovNo ratings yet
- Alberta Competition AnswersDocument53 pagesAlberta Competition AnswersBogus AccountNo ratings yet
- 4102600920398609Document6 pages4102600920398609yachemanenisNo ratings yet
- How To Build Pyramids and Other Orgone GeneratorsDocument6 pagesHow To Build Pyramids and Other Orgone GeneratorsGuy Jones100% (2)
- List of Geometry TopicsDocument6 pagesList of Geometry TopicsMohit SInhaNo ratings yet
- Paper 22y6Document11 pagesPaper 22y6Menaga IlangkovanNo ratings yet
- Practice Test at Home (1) Que. - Answer Key PDFDocument5 pagesPractice Test at Home (1) Que. - Answer Key PDFKushagra SrivastavaNo ratings yet
- Development of SurfacesDocument28 pagesDevelopment of SurfacesAmir100% (2)
- MA Sample Paper 2 UnsolvedDocument9 pagesMA Sample Paper 2 UnsolvedSambasiva RaoNo ratings yet
- Coordinate GeometryDocument4 pagesCoordinate GeometryMohammed ZohaibNo ratings yet
- CH 4 Triangle CongruenceDocument84 pagesCH 4 Triangle CongruenceNap Do100% (1)
- 01 Manipulative Geoboard 2012Document15 pages01 Manipulative Geoboard 2012Aribah Aida JoharyNo ratings yet
- Schaaf W. Mathematics For Mechanics 1942 PDFDocument322 pagesSchaaf W. Mathematics For Mechanics 1942 PDFAnonymous 8Y21cRBNo ratings yet