
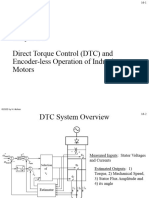
Penggunaan Dan Pengemudian Motor Listrik
Penggunaan Dan Pengemudian Motor Listrik
You might also like
- Homework 1 ConverterDocument4 pagesHomework 1 ConverterGuilherme E Tamira Lopez0% (3)
- Mainframe Interview QuestionsDocument2 pagesMainframe Interview QuestionsapoorvaNo ratings yet
- Direct Torque Control of Induction Machine: Dr. Nik Rumzi Nik IdrisDocument29 pagesDirect Torque Control of Induction Machine: Dr. Nik Rumzi Nik IdrissrinupidNo ratings yet
- Three Phase Induction Motor: Simulation of Direct Torque Control ofDocument36 pagesThree Phase Induction Motor: Simulation of Direct Torque Control ofSandeep Guha Niyogi100% (1)
- (B) 18 Pages Converter Dynamics and ControlDocument18 pages(B) 18 Pages Converter Dynamics and ControlClare DianneNo ratings yet
- 1451 48690501093V PDFDocument24 pages1451 48690501093V PDFНебојша МитровићNo ratings yet
- CH 16Document13 pagesCH 16Alexaa ANo ratings yet
- Who Needs An EMT Model For Doing Stability Studies 2022Document21 pagesWho Needs An EMT Model For Doing Stability Studies 2022maran sNo ratings yet
- Adaptive Hysteresis Band Control For Constant Switching Frequency in DTC Induction Machine Drives (#144406) - 125829Document11 pagesAdaptive Hysteresis Band Control For Constant Switching Frequency in DTC Induction Machine Drives (#144406) - 125829herdal TedongmoNo ratings yet
- 1 en 80 Chapter AuthorDocument11 pages1 en 80 Chapter Authorsaid mahfoudNo ratings yet
- 3.9 The Controlled Half-Wave Rectifier: For More Visit:Www - Learnengineering.InDocument5 pages3.9 The Controlled Half-Wave Rectifier: For More Visit:Www - Learnengineering.InpeiotservicesNo ratings yet
- TS33 Data Sheet EN 2022-07Document5 pagesTS33 Data Sheet EN 2022-07Marouane LbkNo ratings yet
- Direct Torque Control of Induction MotorDocument33 pagesDirect Torque Control of Induction MotorMaheshNo ratings yet
- Direct Torque Control For Induction Motor DrivesDocument13 pagesDirect Torque Control For Induction Motor DrivesscrabrNo ratings yet
- ST - Diode Conduction Losses PDFDocument10 pagesST - Diode Conduction Losses PDFRXRSNo ratings yet
- ESC201T L11 RLC CircuitsDocument31 pagesESC201T L11 RLC CircuitsRachit MahajanNo ratings yet
- CHAPTER 8 - Synchronous Machine Transient AnalysisDocument64 pagesCHAPTER 8 - Synchronous Machine Transient AnalysisMohd A IshakNo ratings yet
- 70.1 02 PDFDocument14 pages70.1 02 PDFyounesNo ratings yet
- DC/DC Converter Solving Methodology II: Ripple in State VariablesDocument6 pagesDC/DC Converter Solving Methodology II: Ripple in State VariablesMiguel Esteban MartinezNo ratings yet
- Instrument Transformer Test Set V-A LAB - SokenDocument4 pagesInstrument Transformer Test Set V-A LAB - SokenEdgar JimenezNo ratings yet
- Topic 9 Control of DC MachinesDocument41 pagesTopic 9 Control of DC Machinescemefi7580No ratings yet
- Slyt 680Document6 pagesSlyt 680mehdiNo ratings yet
- Direct Torque Control of Switched Reluctance Motors: Song, Zhida Li, Zhenghan Zhao, Xiang WangDocument4 pagesDirect Torque Control of Switched Reluctance Motors: Song, Zhida Li, Zhenghan Zhao, Xiang WangSuman SahaNo ratings yet
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 pagesDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666No ratings yet
- CH 7 Alternating CurrentDocument18 pagesCH 7 Alternating CurrentAkash KoulNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- Module-3 (DC Chopper)Document76 pagesModule-3 (DC Chopper)Prasann KatiyarNo ratings yet
- P63x TransformerDifferential ApplicationGuide EN IDocument44 pagesP63x TransformerDifferential ApplicationGuide EN IAllama HasanNo ratings yet
- DTCDocument26 pagesDTCMELVINNo ratings yet
- Performance Improvement of The Induction Motor Drive by Using Robust ControllerDocument6 pagesPerformance Improvement of The Induction Motor Drive by Using Robust Controlleramir amirNo ratings yet
- Consider Three Single-Phase Inverters in Parallel, Driven 120° ApartDocument27 pagesConsider Three Single-Phase Inverters in Parallel, Driven 120° ApartSarwar Hosen SimonNo ratings yet
- Electrical Basics: For Review and RefreshmentDocument18 pagesElectrical Basics: For Review and RefreshmentCold WaterNo ratings yet
- R. W. Erickson: Department of Electrical, Computer, and Energy Engineering University of Colorado, BoulderDocument37 pagesR. W. Erickson: Department of Electrical, Computer, and Energy Engineering University of Colorado, BoulderVijay Kumar LoluguNo ratings yet
- The Direct Torque Control of Induction Motor To Basis of The Space Vector ModulationDocument6 pagesThe Direct Torque Control of Induction Motor To Basis of The Space Vector ModulationJisha KuruvillaNo ratings yet
- Esc201t l10 RC RL CircuitsDocument34 pagesEsc201t l10 RC RL CircuitsRachit MahajanNo ratings yet
- Chapter 2Document40 pagesChapter 2Nabil IbrahimNo ratings yet
- VTB Model For Induction Machine in A-B-C FrameDocument24 pagesVTB Model For Induction Machine in A-B-C FrameHari ReddyNo ratings yet
- L-4 (DK) (Pe) ( (Ee) Nptel) 6Document5 pagesL-4 (DK) (Pe) ( (Ee) Nptel) 6GagneNo ratings yet
- PELSDenverSlides PDFDocument71 pagesPELSDenverSlides PDFFernando Sobrino-Manzanares MasNo ratings yet
- CH 2 - Uncontrolled Rectifiers (Autosaved)Document92 pagesCH 2 - Uncontrolled Rectifiers (Autosaved)Gebremichael Teklay GebretsadikNo ratings yet
- Titolo Presentazione Sottotitolo: Electronic Power Conversion: DctoacDocument55 pagesTitolo Presentazione Sottotitolo: Electronic Power Conversion: DctoacEliot KhNo ratings yet
- Course Roadmap - Rectification - Bipolar Junction TransistorDocument50 pagesCourse Roadmap - Rectification - Bipolar Junction TransistornoorNo ratings yet
- DC DrivesDocument91 pagesDC DrivesferdiNo ratings yet
- Lect 3Document26 pagesLect 3Nur Asyraf NordinNo ratings yet
- DC To AC Conversion (Inverter) : - General Concept - Single-Phase Inverter - Harmonics - Modulation - Three-Phase InverterDocument46 pagesDC To AC Conversion (Inverter) : - General Concept - Single-Phase Inverter - Harmonics - Modulation - Three-Phase Inverterhdrzaman9439No ratings yet
- Electric Motor Drive PDFDocument20 pagesElectric Motor Drive PDFMoaz ShafiNo ratings yet
- Advance Protective RelayDocument30 pagesAdvance Protective Relaysimul HasanNo ratings yet
- ECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisDocument40 pagesECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisVladimir Q. MéndezNo ratings yet
- Chapter 7Document77 pagesChapter 7rizwanspirit11No ratings yet
- DC Choppers: Prof. T.K. Anantha Kumar, E&E Dept., MSRITDocument122 pagesDC Choppers: Prof. T.K. Anantha Kumar, E&E Dept., MSRITAsim DasguptaNo ratings yet
- 1 en 79 Chapter AuthorDocument12 pages1 en 79 Chapter Authorsaid mahfoudNo ratings yet
- Rectifiers 3phaseDocument10 pagesRectifiers 3phaseDaniel KetemawNo ratings yet
- Lecture 4Document60 pagesLecture 4Johnjerald NicolasNo ratings yet
- Lec8 Numerical Distance ProtectionDocument24 pagesLec8 Numerical Distance ProtectionEVTNo ratings yet
- Control Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical SystemsDocument67 pagesControl Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical Systemsdream breaker100% (1)
- Parameter Determination For Electromagnetic Transient Analysis in Power SystemsDocument1 pageParameter Determination For Electromagnetic Transient Analysis in Power SystemsIsnam JukicNo ratings yet
- 3852Document27 pages3852Wana BilaNo ratings yet
- Direct Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorDocument6 pagesDirect Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorquocyenkcdNo ratings yet
- Role-Play and Simulations - Eva..Document17 pagesRole-Play and Simulations - Eva..Mario LandioNo ratings yet
- Material List: Burner DeckDocument1 pageMaterial List: Burner DeckRobe CaroNo ratings yet
- eTimetrackliteWeb Manual PDFDocument124 pageseTimetrackliteWeb Manual PDFsrims shNo ratings yet
- Simple Modeling and Identification Procedures For " Black-Box " Behavioral Modeling of Power Converters Based On Transient Response Analysis - 2009Document15 pagesSimple Modeling and Identification Procedures For " Black-Box " Behavioral Modeling of Power Converters Based On Transient Response Analysis - 2009dsafhNo ratings yet
- UCC28050, UCC28051 UCC38050, UCC38051: FeaturesDocument31 pagesUCC28050, UCC28051 UCC38050, UCC38051: FeaturesJesus SilvaNo ratings yet
- Automatic Transmission (AT) : Transmission With Ravigneaux Planetary-Gear SetDocument1 pageAutomatic Transmission (AT) : Transmission With Ravigneaux Planetary-Gear Setahmed2000No ratings yet
- Handspublishing 1Document19 pagesHandspublishing 1api-298890975No ratings yet
- DP Yh 4300 BrochureDocument2 pagesDP Yh 4300 BrochurenamhtsNo ratings yet
- Cse-IV-unix and Shell Programming (10cs44) - NotesDocument161 pagesCse-IV-unix and Shell Programming (10cs44) - NotesShaik AdiNo ratings yet
- Agard Ar 321 PDFDocument88 pagesAgard Ar 321 PDFkurniawan nugrohoNo ratings yet
- SE-640 Description of The Features 1Document24 pagesSE-640 Description of The Features 1SantoshNo ratings yet
- SR1168Document73 pagesSR1168UltisolarNo ratings yet
- TeksolDocument5 pagesTeksolniki fitraNo ratings yet
- PSV Sizing For VAPOUR OR GAS RELIEFDocument4 pagesPSV Sizing For VAPOUR OR GAS RELIEFD K SNo ratings yet
- HCF 4510Document11 pagesHCF 4510SoeAyeNo ratings yet
- General Introduction About MbaDocument71 pagesGeneral Introduction About MbashagulhameedlNo ratings yet
- IoLogik E1200 SeriesDocument5 pagesIoLogik E1200 SerieshermesNo ratings yet
- Airbus Structural Design ProjectsDocument2 pagesAirbus Structural Design ProjectsHugues de PayensNo ratings yet
- Part List - Piston & Rod Group PDFDocument2 pagesPart List - Piston & Rod Group PDFRahulNo ratings yet
- Automatic Water Level Indicator and ControllerDocument1 pageAutomatic Water Level Indicator and ControllerPrakash RajNo ratings yet
- Reprocessing and Preparation of Devices BK 9103302 en Master 1904 2 PDFDocument36 pagesReprocessing and Preparation of Devices BK 9103302 en Master 1904 2 PDFCinthia PachecoNo ratings yet
- NM8 (S) MCCBDocument52 pagesNM8 (S) MCCBdmugalloyNo ratings yet
- Chrome FlagsDocument11 pagesChrome FlagsSean Mclaren100% (1)
- SyllabusDocument2 pagesSyllabusneerajvidishaNo ratings yet
- Basic Troublshooting Brocade SAN SwitchDocument12 pagesBasic Troublshooting Brocade SAN SwitchPurni Shanti100% (1)
- Procedure Progress ISO 3834 2 PDFDocument3 pagesProcedure Progress ISO 3834 2 PDFKumar DNo ratings yet
- BF6M1013ECG2 Parts CatalogDocument137 pagesBF6M1013ECG2 Parts CatalogAndreyIvanovNo ratings yet
- Tdwi Cbipbro Web Jan11Document8 pagesTdwi Cbipbro Web Jan11tahaqpNo ratings yet
- Manual TCH-240 PDFDocument7 pagesManual TCH-240 PDFRafael Centeno SantanaNo ratings yet
























































































Download as pdf or txt
You might also like
- Homework 1 ConverterDocument4 pagesHomework 1 ConverterGuilherme E Tamira Lopez0% (3)
- Mainframe Interview QuestionsDocument2 pagesMainframe Interview QuestionsapoorvaNo ratings yet
- Direct Torque Control of Induction Machine: Dr. Nik Rumzi Nik IdrisDocument29 pagesDirect Torque Control of Induction Machine: Dr. Nik Rumzi Nik IdrissrinupidNo ratings yet
- Three Phase Induction Motor: Simulation of Direct Torque Control ofDocument36 pagesThree Phase Induction Motor: Simulation of Direct Torque Control ofSandeep Guha Niyogi100% (1)
- (B) 18 Pages Converter Dynamics and ControlDocument18 pages(B) 18 Pages Converter Dynamics and ControlClare DianneNo ratings yet
- 1451 48690501093V PDFDocument24 pages1451 48690501093V PDFНебојша МитровићNo ratings yet
- CH 16Document13 pagesCH 16Alexaa ANo ratings yet
- Who Needs An EMT Model For Doing Stability Studies 2022Document21 pagesWho Needs An EMT Model For Doing Stability Studies 2022maran sNo ratings yet
- Adaptive Hysteresis Band Control For Constant Switching Frequency in DTC Induction Machine Drives (#144406) - 125829Document11 pagesAdaptive Hysteresis Band Control For Constant Switching Frequency in DTC Induction Machine Drives (#144406) - 125829herdal TedongmoNo ratings yet
- 1 en 80 Chapter AuthorDocument11 pages1 en 80 Chapter Authorsaid mahfoudNo ratings yet
- 3.9 The Controlled Half-Wave Rectifier: For More Visit:Www - Learnengineering.InDocument5 pages3.9 The Controlled Half-Wave Rectifier: For More Visit:Www - Learnengineering.InpeiotservicesNo ratings yet
- TS33 Data Sheet EN 2022-07Document5 pagesTS33 Data Sheet EN 2022-07Marouane LbkNo ratings yet
- Direct Torque Control of Induction MotorDocument33 pagesDirect Torque Control of Induction MotorMaheshNo ratings yet
- Direct Torque Control For Induction Motor DrivesDocument13 pagesDirect Torque Control For Induction Motor DrivesscrabrNo ratings yet
- ST - Diode Conduction Losses PDFDocument10 pagesST - Diode Conduction Losses PDFRXRSNo ratings yet
- ESC201T L11 RLC CircuitsDocument31 pagesESC201T L11 RLC CircuitsRachit MahajanNo ratings yet
- CHAPTER 8 - Synchronous Machine Transient AnalysisDocument64 pagesCHAPTER 8 - Synchronous Machine Transient AnalysisMohd A IshakNo ratings yet
- 70.1 02 PDFDocument14 pages70.1 02 PDFyounesNo ratings yet
- DC/DC Converter Solving Methodology II: Ripple in State VariablesDocument6 pagesDC/DC Converter Solving Methodology II: Ripple in State VariablesMiguel Esteban MartinezNo ratings yet
- Instrument Transformer Test Set V-A LAB - SokenDocument4 pagesInstrument Transformer Test Set V-A LAB - SokenEdgar JimenezNo ratings yet
- Topic 9 Control of DC MachinesDocument41 pagesTopic 9 Control of DC Machinescemefi7580No ratings yet
- Slyt 680Document6 pagesSlyt 680mehdiNo ratings yet
- Direct Torque Control of Switched Reluctance Motors: Song, Zhida Li, Zhenghan Zhao, Xiang WangDocument4 pagesDirect Torque Control of Switched Reluctance Motors: Song, Zhida Li, Zhenghan Zhao, Xiang WangSuman SahaNo ratings yet
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 pagesDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666No ratings yet
- CH 7 Alternating CurrentDocument18 pagesCH 7 Alternating CurrentAkash KoulNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- Module-3 (DC Chopper)Document76 pagesModule-3 (DC Chopper)Prasann KatiyarNo ratings yet
- P63x TransformerDifferential ApplicationGuide EN IDocument44 pagesP63x TransformerDifferential ApplicationGuide EN IAllama HasanNo ratings yet
- DTCDocument26 pagesDTCMELVINNo ratings yet
- Performance Improvement of The Induction Motor Drive by Using Robust ControllerDocument6 pagesPerformance Improvement of The Induction Motor Drive by Using Robust Controlleramir amirNo ratings yet
- Consider Three Single-Phase Inverters in Parallel, Driven 120° ApartDocument27 pagesConsider Three Single-Phase Inverters in Parallel, Driven 120° ApartSarwar Hosen SimonNo ratings yet
- Electrical Basics: For Review and RefreshmentDocument18 pagesElectrical Basics: For Review and RefreshmentCold WaterNo ratings yet
- R. W. Erickson: Department of Electrical, Computer, and Energy Engineering University of Colorado, BoulderDocument37 pagesR. W. Erickson: Department of Electrical, Computer, and Energy Engineering University of Colorado, BoulderVijay Kumar LoluguNo ratings yet
- The Direct Torque Control of Induction Motor To Basis of The Space Vector ModulationDocument6 pagesThe Direct Torque Control of Induction Motor To Basis of The Space Vector ModulationJisha KuruvillaNo ratings yet
- Esc201t l10 RC RL CircuitsDocument34 pagesEsc201t l10 RC RL CircuitsRachit MahajanNo ratings yet
- Chapter 2Document40 pagesChapter 2Nabil IbrahimNo ratings yet
- VTB Model For Induction Machine in A-B-C FrameDocument24 pagesVTB Model For Induction Machine in A-B-C FrameHari ReddyNo ratings yet
- L-4 (DK) (Pe) ( (Ee) Nptel) 6Document5 pagesL-4 (DK) (Pe) ( (Ee) Nptel) 6GagneNo ratings yet
- PELSDenverSlides PDFDocument71 pagesPELSDenverSlides PDFFernando Sobrino-Manzanares MasNo ratings yet
- CH 2 - Uncontrolled Rectifiers (Autosaved)Document92 pagesCH 2 - Uncontrolled Rectifiers (Autosaved)Gebremichael Teklay GebretsadikNo ratings yet
- Titolo Presentazione Sottotitolo: Electronic Power Conversion: DctoacDocument55 pagesTitolo Presentazione Sottotitolo: Electronic Power Conversion: DctoacEliot KhNo ratings yet
- Course Roadmap - Rectification - Bipolar Junction TransistorDocument50 pagesCourse Roadmap - Rectification - Bipolar Junction TransistornoorNo ratings yet
- DC DrivesDocument91 pagesDC DrivesferdiNo ratings yet
- Lect 3Document26 pagesLect 3Nur Asyraf NordinNo ratings yet
- DC To AC Conversion (Inverter) : - General Concept - Single-Phase Inverter - Harmonics - Modulation - Three-Phase InverterDocument46 pagesDC To AC Conversion (Inverter) : - General Concept - Single-Phase Inverter - Harmonics - Modulation - Three-Phase Inverterhdrzaman9439No ratings yet
- Electric Motor Drive PDFDocument20 pagesElectric Motor Drive PDFMoaz ShafiNo ratings yet
- Advance Protective RelayDocument30 pagesAdvance Protective Relaysimul HasanNo ratings yet
- ECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisDocument40 pagesECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisVladimir Q. MéndezNo ratings yet
- Chapter 7Document77 pagesChapter 7rizwanspirit11No ratings yet
- DC Choppers: Prof. T.K. Anantha Kumar, E&E Dept., MSRITDocument122 pagesDC Choppers: Prof. T.K. Anantha Kumar, E&E Dept., MSRITAsim DasguptaNo ratings yet
- 1 en 79 Chapter AuthorDocument12 pages1 en 79 Chapter Authorsaid mahfoudNo ratings yet
- Rectifiers 3phaseDocument10 pagesRectifiers 3phaseDaniel KetemawNo ratings yet
- Lecture 4Document60 pagesLecture 4Johnjerald NicolasNo ratings yet
- Lec8 Numerical Distance ProtectionDocument24 pagesLec8 Numerical Distance ProtectionEVTNo ratings yet
- Control Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical SystemsDocument67 pagesControl Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical Systemsdream breaker100% (1)
- Parameter Determination For Electromagnetic Transient Analysis in Power SystemsDocument1 pageParameter Determination For Electromagnetic Transient Analysis in Power SystemsIsnam JukicNo ratings yet
- 3852Document27 pages3852Wana BilaNo ratings yet
- Direct Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorDocument6 pagesDirect Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorquocyenkcdNo ratings yet
- Role-Play and Simulations - Eva..Document17 pagesRole-Play and Simulations - Eva..Mario LandioNo ratings yet
- Material List: Burner DeckDocument1 pageMaterial List: Burner DeckRobe CaroNo ratings yet
- eTimetrackliteWeb Manual PDFDocument124 pageseTimetrackliteWeb Manual PDFsrims shNo ratings yet
- Simple Modeling and Identification Procedures For " Black-Box " Behavioral Modeling of Power Converters Based On Transient Response Analysis - 2009Document15 pagesSimple Modeling and Identification Procedures For " Black-Box " Behavioral Modeling of Power Converters Based On Transient Response Analysis - 2009dsafhNo ratings yet
- UCC28050, UCC28051 UCC38050, UCC38051: FeaturesDocument31 pagesUCC28050, UCC28051 UCC38050, UCC38051: FeaturesJesus SilvaNo ratings yet
- Automatic Transmission (AT) : Transmission With Ravigneaux Planetary-Gear SetDocument1 pageAutomatic Transmission (AT) : Transmission With Ravigneaux Planetary-Gear Setahmed2000No ratings yet
- Handspublishing 1Document19 pagesHandspublishing 1api-298890975No ratings yet
- DP Yh 4300 BrochureDocument2 pagesDP Yh 4300 BrochurenamhtsNo ratings yet
- Cse-IV-unix and Shell Programming (10cs44) - NotesDocument161 pagesCse-IV-unix and Shell Programming (10cs44) - NotesShaik AdiNo ratings yet
- Agard Ar 321 PDFDocument88 pagesAgard Ar 321 PDFkurniawan nugrohoNo ratings yet
- SE-640 Description of The Features 1Document24 pagesSE-640 Description of The Features 1SantoshNo ratings yet
- SR1168Document73 pagesSR1168UltisolarNo ratings yet
- TeksolDocument5 pagesTeksolniki fitraNo ratings yet
- PSV Sizing For VAPOUR OR GAS RELIEFDocument4 pagesPSV Sizing For VAPOUR OR GAS RELIEFD K SNo ratings yet
- HCF 4510Document11 pagesHCF 4510SoeAyeNo ratings yet
- General Introduction About MbaDocument71 pagesGeneral Introduction About MbashagulhameedlNo ratings yet
- IoLogik E1200 SeriesDocument5 pagesIoLogik E1200 SerieshermesNo ratings yet
- Airbus Structural Design ProjectsDocument2 pagesAirbus Structural Design ProjectsHugues de PayensNo ratings yet
- Part List - Piston & Rod Group PDFDocument2 pagesPart List - Piston & Rod Group PDFRahulNo ratings yet
- Automatic Water Level Indicator and ControllerDocument1 pageAutomatic Water Level Indicator and ControllerPrakash RajNo ratings yet
- Reprocessing and Preparation of Devices BK 9103302 en Master 1904 2 PDFDocument36 pagesReprocessing and Preparation of Devices BK 9103302 en Master 1904 2 PDFCinthia PachecoNo ratings yet
- NM8 (S) MCCBDocument52 pagesNM8 (S) MCCBdmugalloyNo ratings yet
- Chrome FlagsDocument11 pagesChrome FlagsSean Mclaren100% (1)
- SyllabusDocument2 pagesSyllabusneerajvidishaNo ratings yet
- Basic Troublshooting Brocade SAN SwitchDocument12 pagesBasic Troublshooting Brocade SAN SwitchPurni Shanti100% (1)
- Procedure Progress ISO 3834 2 PDFDocument3 pagesProcedure Progress ISO 3834 2 PDFKumar DNo ratings yet
- BF6M1013ECG2 Parts CatalogDocument137 pagesBF6M1013ECG2 Parts CatalogAndreyIvanovNo ratings yet
- Tdwi Cbipbro Web Jan11Document8 pagesTdwi Cbipbro Web Jan11tahaqpNo ratings yet
- Manual TCH-240 PDFDocument7 pagesManual TCH-240 PDFRafael Centeno SantanaNo ratings yet