Download as pdf or txt
You might also like
- XSteam Excel v2.6Document4 pagesXSteam Excel v2.6cudizNo ratings yet
- Lab Report 5. Investigating The Hydraulic JumpDocument12 pagesLab Report 5. Investigating The Hydraulic Jumpfazeen100% (1)
- Mathematical Methods of Physics PDFDocument515 pagesMathematical Methods of Physics PDFGabrielNunesNo ratings yet
- Seminar 7: Denirea Functiilor Trigonometrice TG Si Cotg, Proprietatile Lor, Formule TrigonometriceDocument1 pageSeminar 7: Denirea Functiilor Trigonometrice TG Si Cotg, Proprietatile Lor, Formule Trigonometricechelarescu anisoarakNo ratings yet
- Chapter 1 Det50063 - IntroductionDocument12 pagesChapter 1 Det50063 - IntroductionFara FaraNo ratings yet
- Cable Engineering: Advaris C2Document4 pagesCable Engineering: Advaris C2MeryL AngNo ratings yet
- Servo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SDocument27 pagesServo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SThameem AbbasNo ratings yet
- 1.5 Electric MotorsDocument64 pages1.5 Electric MotorsLeojhun PalisocNo ratings yet
- Unit 2Document72 pagesUnit 2Amar Hain HumNo ratings yet
- Stepper Motor & Servo Motor: S.RavisubramanianDocument78 pagesStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- Chapter - 1 DET5063 Combine pdf-1Document30 pagesChapter - 1 DET5063 Combine pdf-1Muhd FaizNo ratings yet
- Stepper Motor KTDocument18 pagesStepper Motor KTSankula Siva SankarNo ratings yet
- UNIT-3 Robot Drive MechanisamDocument82 pagesUNIT-3 Robot Drive MechanisamChetuNo ratings yet
- MotorsDocument31 pagesMotorsstraffor100% (1)
- Group 3 Reporting1Document158 pagesGroup 3 Reporting1skylerr.jordanNo ratings yet
- Motor&Drive BasicsDocument35 pagesMotor&Drive Basicsmathankumar1980No ratings yet
- Motor Speed ControlDocument11 pagesMotor Speed ControlCharle CandelarioNo ratings yet
- Unit - 2 SSDDocument85 pagesUnit - 2 SSDAkshat SaxenaNo ratings yet
- Spem NotesDocument43 pagesSpem Notesolalatom8No ratings yet
- Electrical DrivesDocument102 pagesElectrical DrivesDeepanshu Saxena100% (1)
- ActuatorsDocument88 pagesActuatorsMrs. Prabha Niranjan NMAMIT E & ENo ratings yet
- Robot Actuators & Feed Back ComponentsDocument25 pagesRobot Actuators & Feed Back ComponentsANONYMOUS PDFSNo ratings yet
- Chapter 1 - Electric DriveDocument76 pagesChapter 1 - Electric DriveNajihah YusofNo ratings yet
- Types of Starters: It'S Features and Advantages& DisadvantagesDocument30 pagesTypes of Starters: It'S Features and Advantages& DisadvantagesGrace ZuluetaNo ratings yet
- TOPIK1 - 27.9.2021 Versi 2 BARUDocument45 pagesTOPIK1 - 27.9.2021 Versi 2 BARUtiagoNo ratings yet
- Universal Motor and ServomotorDocument10 pagesUniversal Motor and ServomotorChamila SumathiratnaNo ratings yet
- Kaizen - Motor Selection GuideDocument10 pagesKaizen - Motor Selection GuideKarrar HussainNo ratings yet
- Chapter 3 DET50063 - SPEED CONTROL OF AC MOTORDocument19 pagesChapter 3 DET50063 - SPEED CONTROL OF AC MOTORFara FaraNo ratings yet
- Brushless DC Motors Stepping Motors Single Phase Motors The Universal Motors Single-Phase Induction MotorsDocument7 pagesBrushless DC Motors Stepping Motors Single Phase Motors The Universal Motors Single-Phase Induction MotorsÇoci ANo ratings yet
- Instrumentation 2: Stepper MotorsDocument24 pagesInstrumentation 2: Stepper MotorsBabei Ionut-MihaiNo ratings yet
- Ch8 - DC DrivesDocument55 pagesCh8 - DC DrivesAli HasanyNo ratings yet
- Motor Control: (Relay, PWM, DC, and Stepper Motors)Document36 pagesMotor Control: (Relay, PWM, DC, and Stepper Motors)Ammar EhabNo ratings yet
- Reluctance Motor Reluctance MotorDocument10 pagesReluctance Motor Reluctance MotorsrmceNo ratings yet
- Actuation and Mectronics DesignDocument15 pagesActuation and Mectronics DesignnarayanamoortyNo ratings yet
- IDS NewDocument128 pagesIDS NewShahbaz Ali100% (1)
- WEG Weg Soft Starter Training May 2016 Training EnglishDocument38 pagesWEG Weg Soft Starter Training May 2016 Training Englishtnfenixin037No ratings yet
- Stepper MotorDocument19 pagesStepper MotorSumit TiwariNo ratings yet
- Interfacing Stepper Motor With 8051 MicrocontrollerDocument21 pagesInterfacing Stepper Motor With 8051 MicrocontrollerSam AndersonNo ratings yet
- EPD Introduction ModuleDocument20 pagesEPD Introduction Modulesubhasish nayakNo ratings yet
- Dr. BK Singh's Mechatronics Chap-3Document52 pagesDr. BK Singh's Mechatronics Chap-3Mekibib EmawayihNo ratings yet
- 3 Phase Induction Motor StarterDocument28 pages3 Phase Induction Motor StarterDivanshu GargNo ratings yet
- Group 6 - DC Motors PDFDocument22 pagesGroup 6 - DC Motors PDFRashen DilNo ratings yet
- Unit-2, PPT 1Document29 pagesUnit-2, PPT 1VELIVELA LAKSHMIKANTHNo ratings yet
- Brushless DC MotorDocument20 pagesBrushless DC Motorahxanraza100% (1)
- Wind Turbine Generators For Wind Power PlantsDocument43 pagesWind Turbine Generators For Wind Power Plantsishikashaw0310No ratings yet
- Drives Acdc - CNCDocument42 pagesDrives Acdc - CNCShami KunalNo ratings yet
- 2019 Lecture4 - MotorsDocument42 pages2019 Lecture4 - MotorsChailenderNo ratings yet
- Chapter 2Document46 pagesChapter 2Syazwan HafidziNo ratings yet
- Unit 2Document29 pagesUnit 2VELIVELA LAKSHMIKANTHNo ratings yet
- Week 11 - Electric MotorsDocument17 pagesWeek 11 - Electric MotorsSandino Michael Angelo AguilarNo ratings yet
- Chapter 4 DC MachinesDocument82 pagesChapter 4 DC MachinesShikoyeniNo ratings yet
- Motor Basics Lecture PDFDocument23 pagesMotor Basics Lecture PDFRichardNo ratings yet
- EM ch-9 DC MOTORS AND GENERATORSDocument65 pagesEM ch-9 DC MOTORS AND GENERATORSmuhammad.anas2007No ratings yet
- Iam PPT FHD MotorsDocument25 pagesIam PPT FHD MotorsShreeNo ratings yet
- Motors Convert Electric Energy To Mechanical MotionDocument9 pagesMotors Convert Electric Energy To Mechanical MotionwissamhijaziNo ratings yet
- Direct-Current Motor CharacteristicsDocument17 pagesDirect-Current Motor CharacteristicsMarque Adrian EncinaNo ratings yet
- Advanced Electrical Drives: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalDocument105 pagesAdvanced Electrical Drives: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalVenomNo ratings yet
- Assignment-21 Nikhil Kumar 4SN16EE012: 1. Explain With Block Diagram of Variable Frequency Drive?Document18 pagesAssignment-21 Nikhil Kumar 4SN16EE012: 1. Explain With Block Diagram of Variable Frequency Drive?Rithesh kanchanNo ratings yet
- Solid State Motor ControDocument22 pagesSolid State Motor ControJesse Jones SeraspeNo ratings yet
- Chapter 4Document37 pagesChapter 4Atul Jaysing PatilNo ratings yet
- Electric MotorsDocument16 pagesElectric MotorsAlin StanciuNo ratings yet
- Energy Savings in Air Compressors - by Incorporation of VFDDocument32 pagesEnergy Savings in Air Compressors - by Incorporation of VFDnikut_0777No ratings yet
- DCMotorsDocument19 pagesDCMotorsAndrew BuckleyNo ratings yet
- CNCDocument63 pagesCNCSahil Bangia100% (1)
- PVC Wire and Cable CoatingDocument7 pagesPVC Wire and Cable CoatingMeryL AngNo ratings yet
- Convection Type Air-Heated Fish Dryer..Document68 pagesConvection Type Air-Heated Fish Dryer..MeryL AngNo ratings yet
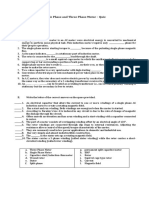
- Single Phase and Three Phase Motor QuizDocument3 pagesSingle Phase and Three Phase Motor QuizMeryL AngNo ratings yet
- Design and Testing of A Natural Convection Solar Fish Dryer PDFDocument114 pagesDesign and Testing of A Natural Convection Solar Fish Dryer PDFMeryL AngNo ratings yet
- Single Phase and Three Phase Motor QuizDocument2 pagesSingle Phase and Three Phase Motor QuizMeryL AngNo ratings yet
- Soil Bearing Capacity (PDF) - 201412230858174905Document1 pageSoil Bearing Capacity (PDF) - 201412230858174905MeryL Ang100% (1)
- Tensile Test, Torsion Test: Conceptual EngineeringDocument7 pagesTensile Test, Torsion Test: Conceptual EngineeringMeryL AngNo ratings yet
- LMTD SampleDocument2 pagesLMTD SampleMeryL AngNo ratings yet
- Accidents and Causation Theories and ConceptsDocument4 pagesAccidents and Causation Theories and ConceptsMeryL AngNo ratings yet
- Pre Colonial PHDocument5 pagesPre Colonial PHMeryL AngNo ratings yet
- LMTD SampleDocument2 pagesLMTD SampleMeryL AngNo ratings yet
- LMTDDocument2 pagesLMTDMeryL AngNo ratings yet
- Centrifugal Pumps: PARAN, John Lloyd MACASAET, Alwin MALABUYOC, Lean ErnestDocument74 pagesCentrifugal Pumps: PARAN, John Lloyd MACASAET, Alwin MALABUYOC, Lean ErnestMeryL Ang100% (1)
- Ultrasonic TestingDocument29 pagesUltrasonic TestingMeryL Ang100% (1)
- 2006 - Dong Et Al - Bulk and Dispersed Aqueous Phase Behavior of PhytantriolDocument7 pages2006 - Dong Et Al - Bulk and Dispersed Aqueous Phase Behavior of PhytantriolHe ZeeNo ratings yet
- SymmetryDocument43 pagesSymmetryDeepa Kapadia0% (1)
- Design of Wireless Power Transfer System For RailwDocument9 pagesDesign of Wireless Power Transfer System For Railw19TK5AO265 V.NavaneethaNo ratings yet
- Trunnion CalculationsDocument2 pagesTrunnion Calculationspmech consultantNo ratings yet
- Mrmarine ElectrotechnologyDocument49 pagesMrmarine ElectrotechnologyFait HeeNo ratings yet
- How To Check Relative Prime NumbersDocument5 pagesHow To Check Relative Prime NumbersBabar SaeedNo ratings yet
- Diffraction F. M. Grimaldi: Click On The Image For DetailsDocument5 pagesDiffraction F. M. Grimaldi: Click On The Image For DetailsGxilleNo ratings yet
- Chemistrymc Febuary 14, 2012Document4 pagesChemistrymc Febuary 14, 2012Brandon LamNo ratings yet
- BTech IT SyllabusDocument91 pagesBTech IT SyllabusYashangNo ratings yet
- AIATSOYMEO2016T05 Solution PDFDocument30 pagesAIATSOYMEO2016T05 Solution PDFsanthosh7kumar-24No ratings yet
- Upright Pendent SprinklersDocument5 pagesUpright Pendent SprinklersDammak100% (1)
- Diesel Sigma S 10w API CDSFDocument1 pageDiesel Sigma S 10w API CDSFnguyenquoc1988No ratings yet
- Chapter 17 Plane Motion of Rigid Bodies (Repaired)Document52 pagesChapter 17 Plane Motion of Rigid Bodies (Repaired)Ng Shin JouNo ratings yet
- Rothoblaas - Typ S.certificate Eta - enDocument47 pagesRothoblaas - Typ S.certificate Eta - enAndrei GheorghicaNo ratings yet
- Energy: Jesús Polo, Jesús Ballestrín, Elena CarraDocument8 pagesEnergy: Jesús Polo, Jesús Ballestrín, Elena CarraDuvan Leandro Parra VelandiaNo ratings yet
- Agard Ag 302Document102 pagesAgard Ag 302Ania SkierkaNo ratings yet
- Group 4 - Ideal Gas Vs Real Gas Experiment PDFDocument5 pagesGroup 4 - Ideal Gas Vs Real Gas Experiment PDFHumaira NabilaNo ratings yet
- Certification: Construction and Study of Miniature TrebuchetDocument38 pagesCertification: Construction and Study of Miniature TrebuchetAavash PokhrelNo ratings yet
- Concept Paper-Bagasse As FuelDocument12 pagesConcept Paper-Bagasse As FuelDaniel Andre Ocampo PrudencioNo ratings yet
- International Journal On Recent TechnoloDocument4 pagesInternational Journal On Recent TechnoloAdnan NajemNo ratings yet
- Chapter 7Document29 pagesChapter 7rajesh.v.v.kNo ratings yet
- Practice Test: Question Set - 09: MCQ Workshop EnggDocument5 pagesPractice Test: Question Set - 09: MCQ Workshop Enggl8o8r8d8s8i8v8No ratings yet
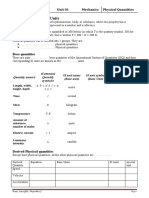
- U01 - Mec - Physical QuantitiesDocument10 pagesU01 - Mec - Physical QuantitiesTesting AcountNo ratings yet
- ILLUMINATION Semi FinalDocument8 pagesILLUMINATION Semi FinalDonna MelgarNo ratings yet
- Scilab ProgramsDocument11 pagesScilab ProgramsPrateek_1475% (4)
- Basics of Foundation DesignDocument454 pagesBasics of Foundation DesignZainebAl-FaeslyNo ratings yet