You might also like
- Chp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - FinalDocument49 pagesChp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - Finalblaze emberNo ratings yet
- Presentation of Electric MotorDocument20 pagesPresentation of Electric MotorRicky Raj100% (2)
- Four Quadrant Operation of DC Drives: - Dual ConvertersDocument12 pagesFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna VeniNo ratings yet
- Lecture 14 Memory InterfaceDocument19 pagesLecture 14 Memory Interfacenjpar0% (2)
- Electrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Document83 pagesElectrical Drives and Control - Unit-I (MECHANICAL ENGINEERING)Thivya PrasadNo ratings yet
- Introduction To Electrical DrivesDocument18 pagesIntroduction To Electrical DrivesSidali Chaib50% (2)
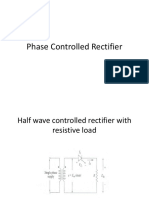
- Phase Controlled RectifierDocument33 pagesPhase Controlled RectifierHarsh HaldiyaNo ratings yet
- Ed Lab ManualDocument27 pagesEd Lab ManualBonnieNo ratings yet
- Practical - 3 - Four Quadrant Chopper Fed DC DriveDocument15 pagesPractical - 3 - Four Quadrant Chopper Fed DC Drivekiran navaleNo ratings yet
- Closed Loop Control of Separately Excited DC MotorDocument13 pagesClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHINo ratings yet
- Control System Lab ManualDocument20 pagesControl System Lab ManualvaibhavNo ratings yet
- Closed Loop Control of DC Drives - Electrical DrivesDocument41 pagesClosed Loop Control of DC Drives - Electrical DrivesRohan SharmaNo ratings yet
- 8051 Questions and Answers For Freshers - SanfoundryDocument4 pages8051 Questions and Answers For Freshers - SanfoundrySumit SrivastavaNo ratings yet
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- Static RelaysDocument89 pagesStatic RelaysAnonymous DbmKEDxNo ratings yet
- Static RelaysDocument11 pagesStatic RelaysBharathwaj SreedharNo ratings yet
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- Synchronous Motor DrivesDocument17 pagesSynchronous Motor DrivessidharthNo ratings yet
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiNo ratings yet
- AC DC DrivesDocument13 pagesAC DC Drives322399mk7086No ratings yet
- Bundled Conductors PDFDocument2 pagesBundled Conductors PDFSureshraja9977No ratings yet
- Introduction To Electric DrivesDocument50 pagesIntroduction To Electric DrivesDevaraju ThangellamudiNo ratings yet
- Electronics Interview Questions-Interview Questions and Answers-25073Document4 pagesElectronics Interview Questions-Interview Questions and Answers-25073Md Tarique AnsariNo ratings yet
- 3 Phase-Controlled DC Motor DrivesDocument45 pages3 Phase-Controlled DC Motor DrivesgilmartNo ratings yet
- Module-2 - Phase Controlled RectifierDocument80 pagesModule-2 - Phase Controlled RectifieruttamNo ratings yet
- BrakingDocument19 pagesBrakingMohammad Umar RehmanNo ratings yet
- EE8005 Special Electrical Machines A Course Material OnDocument151 pagesEE8005 Special Electrical Machines A Course Material OnjoNo ratings yet
- Universal Motor Multiple Choice Questions (MCQ) and Answers Universal Motor Multiple Choice Questions and AnswersDocument2 pagesUniversal Motor Multiple Choice Questions (MCQ) and Answers Universal Motor Multiple Choice Questions and Answersपंकज काळेNo ratings yet
- Single Phase Rectifier Fed DC Motor DriveDocument11 pagesSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- Steady-State Analysis of DC MotorsDocument24 pagesSteady-State Analysis of DC MotorsUsama RaoNo ratings yet
- Short Notes On Servo MotorDocument2 pagesShort Notes On Servo MotorHimansu Goswami100% (3)
- 17ee82 - Ida - Mod 4 NotesDocument18 pages17ee82 - Ida - Mod 4 NotesManish Kumar SahaniNo ratings yet
- Nptel: High Voltage DC Transmission - Web CourseDocument2 pagesNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
- DMA Controller - 8237Document9 pagesDMA Controller - 8237Umesh Harihara sudanNo ratings yet
- Control System: Lag Lead CompensatorDocument13 pagesControl System: Lag Lead CompensatorBhargab KakatiNo ratings yet
- Closed Loop Speed Control of DC Motor DrivesDocument4 pagesClosed Loop Speed Control of DC Motor DrivesypobuleshNo ratings yet
- Electric DrivesDocument52 pagesElectric DrivesPanhwer Sajid AliNo ratings yet
- Power Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Document69 pagesPower Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Sankaran Nampoothiri KrishnanNo ratings yet
- Eeeviews: Unit Iv Synchronous Motor DrivesDocument26 pagesEeeviews: Unit Iv Synchronous Motor Driveskrithikgokul selvamNo ratings yet
- Lecture Time Domain Analysis of Control SystemsDocument15 pagesLecture Time Domain Analysis of Control SystemsFahadKhNo ratings yet
- Synchronous Machines Question BankDocument10 pagesSynchronous Machines Question BankelecenggNo ratings yet
- Electric BrakingDocument27 pagesElectric Brakingmastanamma.YNo ratings yet
- SGP Lab ManualDocument17 pagesSGP Lab Manualshreemanti75% (4)
- Thyristor Controlled Braking Resistor: Malaviya National Institute of Technology JaipurDocument13 pagesThyristor Controlled Braking Resistor: Malaviya National Institute of Technology JaipurRiteshBhattNo ratings yet
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- Solved Numerical Problems On DC Motor DrivesDocument4 pagesSolved Numerical Problems On DC Motor DrivesypobuleshNo ratings yet
- Synopsis Proposal For 2021Document4 pagesSynopsis Proposal For 20212k18-EE-243 Vethushan VinnayagamoorththiNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Project Report Class 12 On TRANSFORMERDocument23 pagesProject Report Class 12 On TRANSFORMERArnav TiwariNo ratings yet
- Take Electrical Drives MCQ Test & Online Quiz To Test Your KnowledgeDocument4 pagesTake Electrical Drives MCQ Test & Online Quiz To Test Your KnowledgeLokesh ChowdaryNo ratings yet
- Permanent Magnet Brushless DC MotorDocument18 pagesPermanent Magnet Brushless DC MotorBala SubramanianNo ratings yet
- A McMurray InverterDocument2 pagesA McMurray Inverteranshu71% (7)
- EPD Introduction ModuleDocument20 pagesEPD Introduction Modulesubhasish nayakNo ratings yet
- Chapter 1 Intro To Electrical DrivesDocument76 pagesChapter 1 Intro To Electrical DrivesAfiq ZahinNo ratings yet
- DRIVES PPT45 - 16255 - EE424 - 2015 - 1 - 2 - 1 - Week 1Document12 pagesDRIVES PPT45 - 16255 - EE424 - 2015 - 1 - 2 - 1 - Week 1Prema Kumar NavuriNo ratings yet
- Introduction (V1)Document24 pagesIntroduction (V1)مصطفى حمدىNo ratings yet
- 1 Introduction To Electrical DrivesDocument45 pages1 Introduction To Electrical DrivesSetya Ardhi67% (3)
- Electric Drive Systems: What Is A Drive System?Document10 pagesElectric Drive Systems: What Is A Drive System?Emirhan AlmaNo ratings yet
- Electric MotorDocument40 pagesElectric MotorhmiwukcyNo ratings yet
- PDFDocument32 pagesPDFdinesh kNo ratings yet
- BEIJER - StartUp Ix (09 - 2014)Document362 pagesBEIJER - StartUp Ix (09 - 2014)Jorge_Andril_5370No ratings yet
- School of Distance Education Examinations: Bharathiar University Coimbatore - 46 Time Table For May 2014 ExaminationsDocument33 pagesSchool of Distance Education Examinations: Bharathiar University Coimbatore - 46 Time Table For May 2014 ExaminationsGokul PrabuNo ratings yet
- William Stallings Computer Organization and Architecture 9 EditionDocument51 pagesWilliam Stallings Computer Organization and Architecture 9 EditionAnggi Riza Amirullah SidhartaNo ratings yet
- Orientation Seminar A.K.A. OrsemDocument4 pagesOrientation Seminar A.K.A. OrsemPauline PrudencioNo ratings yet
- Bee4113 Chapter 3Document30 pagesBee4113 Chapter 3Kung ChinHan100% (17)
- Creating Flat and Complex Internal Tables Dynamically Using RTTI - Code Gallery - SCN WikiDocument3 pagesCreating Flat and Complex Internal Tables Dynamically Using RTTI - Code Gallery - SCN Wikiabdul.shaikNo ratings yet
- Sikes QuestionDocument8 pagesSikes Questionsujan pokhrelNo ratings yet
- ISSUE Tracking DocumentDocument64 pagesISSUE Tracking DocumentAishwarya SairamNo ratings yet
- Ovum Decision Matrix CRM Telcos 2183241Document16 pagesOvum Decision Matrix CRM Telcos 2183241SilvioNo ratings yet
- 7 - 16 CLASS Final PDFDocument36 pages7 - 16 CLASS Final PDFElBuen JohnNo ratings yet
- Product Link / Machine: Product Link PL631 and PL641 PLE601, PLE631 and PLE641Document2 pagesProduct Link / Machine: Product Link PL631 and PL641 PLE601, PLE631 and PLE641Daniel Pacheco LLantoyNo ratings yet
- Manual Hidraulico Montacargas Yale Gp060rcDocument52 pagesManual Hidraulico Montacargas Yale Gp060rcPepe AlNo ratings yet
- CPM3700 Acid Gas Removal PlantsDocument32 pagesCPM3700 Acid Gas Removal PlantsFawaz AlsaifNo ratings yet
- Hardering OracleDocument40 pagesHardering OracleFabian Alejandro Molina SosaNo ratings yet
- En Product Overview 0710Document13 pagesEn Product Overview 0710S Srinivasan SowrirajanNo ratings yet
- Past Year OM Sem 2 18/19Document11 pagesPast Year OM Sem 2 18/19Maira AhmadNo ratings yet
- Virtual Instrumentation PPT Persentation Way2project inDocument16 pagesVirtual Instrumentation PPT Persentation Way2project inSharan ShivaNo ratings yet
- Switchgear Preventive MaintainanceDocument59 pagesSwitchgear Preventive MaintainancerkbcppNo ratings yet
- Job Title: Software Development & Support Reports To: Senior Manager Location: Toronto, ONDocument1 pageJob Title: Software Development & Support Reports To: Senior Manager Location: Toronto, ONThomas RosickyNo ratings yet
- XSS Street Fight Ryan Barnett BlackhatDC 2011Document69 pagesXSS Street Fight Ryan Barnett BlackhatDC 2011Carlos BravoNo ratings yet
- 05 00 TTP - Technical Document Numbering System - FDocument15 pages05 00 TTP - Technical Document Numbering System - FNigelllewellyn1No ratings yet
- King Post Wall Design-1Document10 pagesKing Post Wall Design-1Ibrahim MeharoofNo ratings yet
- Fobos Gas Schematics enDocument15 pagesFobos Gas Schematics enzozo0424No ratings yet
- Canadian Solar KuPower HiKu CS3L 370W MS - Super High PowerDocument2 pagesCanadian Solar KuPower HiKu CS3L 370W MS - Super High PowercristiNo ratings yet
- Sreehari.K: E-Mail: Contact No: +918296750735Document4 pagesSreehari.K: E-Mail: Contact No: +918296750735sreeharir80% (1)
- Godrej Product Catalogue - WebDocument68 pagesGodrej Product Catalogue - WebUmesh ChakravartiNo ratings yet
- Business Continuity Management System A Complete G... - (7 Operation)Document78 pagesBusiness Continuity Management System A Complete G... - (7 Operation)Priyadarshini Das100% (1)
- 2018 Hydraulically Amplified Self-Healing Electrostatic Actuators With Muscle-Like PerformanceDocument6 pages2018 Hydraulically Amplified Self-Healing Electrostatic Actuators With Muscle-Like PerformanceJack LeeNo ratings yet
- Noise Control in BuildingsDocument36 pagesNoise Control in BuildingsEmily Ong100% (1)