Download as docx, pdf, or txt
You might also like
- Dodge 45RFE 545RFE ELECTRICAL Manual PDFDocument263 pagesDodge 45RFE 545RFE ELECTRICAL Manual PDFsilver0580100% (7)
- Service Manual: Publication No. 9803/4200 Issue 11Document457 pagesService Manual: Publication No. 9803/4200 Issue 11red0% (1)
- Product Data Sheet ServotwinDocument2 pagesProduct Data Sheet Servotwinurl295100% (1)
- Tad 720 GeDocument2 pagesTad 720 GeRudy Okta LNo ratings yet
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDocument18 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesVK DNo ratings yet
- Alternators Connected To Infinite Bus BarDocument9 pagesAlternators Connected To Infinite Bus BarbharatkNo ratings yet
- High-Voltage-Test - IS 40291967-Guide For Testing Three Phase Induction MotorDocument1 pageHigh-Voltage-Test - IS 40291967-Guide For Testing Three Phase Induction MotorTTaanNo ratings yet
- Excitation Phenomena in Transformers Excitation Phenomena With Out HysteresisDocument2 pagesExcitation Phenomena in Transformers Excitation Phenomena With Out Hysteresism_mustaqeem100% (1)
- Load Test On Three Phase Induction Motor: Experiment No: 1Document4 pagesLoad Test On Three Phase Induction Motor: Experiment No: 1Bodhayan PrasadNo ratings yet
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 pagesExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNo ratings yet
- SyncroDocument5 pagesSyncroRajat MittalNo ratings yet
- Chapter - 2 DC & AC BridgesDocument18 pagesChapter - 2 DC & AC Bridgesvnyshreyas100% (2)
- Expt. 9 Single Phase Bridge Inverter: Aim of The ExperimentDocument8 pagesExpt. 9 Single Phase Bridge Inverter: Aim of The ExperimentUtpanna HotaNo ratings yet
- Reactance RelayDocument15 pagesReactance RelayAngel RacasaNo ratings yet
- Anderson Bridge: User ManualDocument12 pagesAnderson Bridge: User Manualaa_nilawarNo ratings yet
- Travelling Waves 1Document12 pagesTravelling Waves 1Shareef ChampNo ratings yet
- 1.voltage Distribution Across String of InsulatorsDocument3 pages1.voltage Distribution Across String of Insulatorsarjuna4306No ratings yet
- Magnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateDocument60 pagesMagnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateSuyash SinghNo ratings yet
- Feedback Amplifiers-EDC PDFDocument45 pagesFeedback Amplifiers-EDC PDFanjanaNo ratings yet
- Laboratory Report #04 Testing TransformersDocument5 pagesLaboratory Report #04 Testing TransformersCristian Camilo Díaz Piñeros0% (1)
- Light Intensity ControlDocument8 pagesLight Intensity ControlRaman GargNo ratings yet
- Dynamic Characteristics of ThyristorDocument4 pagesDynamic Characteristics of ThyristordamiesiksNo ratings yet
- Psabits WithanswersDocument12 pagesPsabits WithanswersChinnareddy KarriNo ratings yet
- Expt. No. 4 Measurement of Resistance Using Kelvin'S Double Bridge AimDocument3 pagesExpt. No. 4 Measurement of Resistance Using Kelvin'S Double Bridge AimmamoonNo ratings yet
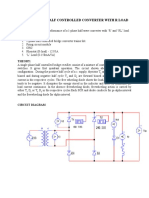
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNo ratings yet
- Machine LabDocument7 pagesMachine LabNurjahan-Ara StudentNo ratings yet
- Direct - Indirect - Regenerative Method of TestingDocument29 pagesDirect - Indirect - Regenerative Method of TestingASHIM KUMAR SAHUNo ratings yet
- Ee 591 Machine 2 PDFDocument39 pagesEe 591 Machine 2 PDFPrabhat Kumar SahuNo ratings yet
- DC Shunt Motor Change DrictionDocument4 pagesDC Shunt Motor Change Drictionnved01No ratings yet
- Conduction and Breakdown of Pure LiquidsDocument18 pagesConduction and Breakdown of Pure LiquidsPrakash Parajuli0% (1)
- Experiment - 12: Power Angle Curve of Syncronous MachineDocument3 pagesExperiment - 12: Power Angle Curve of Syncronous MachinesanjuNo ratings yet
- Circuit Thoery Lab ManualDocument57 pagesCircuit Thoery Lab ManualsrisairampolyNo ratings yet
- Atvus PRVDocument6 pagesAtvus PRVvipulpanchotiyaNo ratings yet
- Swinburne S Test On DC Shunt MotorDocument5 pagesSwinburne S Test On DC Shunt Motortamann2004No ratings yet
- Electrical Machines-III Question BankDocument9 pagesElectrical Machines-III Question BanksanthiNo ratings yet
- Basic Electrical Machines (Eceg132) Laboratory Manual: Department of Electrical and Computer EngineeringDocument158 pagesBasic Electrical Machines (Eceg132) Laboratory Manual: Department of Electrical and Computer EngineeringRonan Rojas100% (1)
- Speed Control of DC Shunt MotorDocument7 pagesSpeed Control of DC Shunt MotorAakash0% (1)
- Electrical Workshop Lab Diploma SemesterDocument2 pagesElectrical Workshop Lab Diploma Semestergaurav sharmaNo ratings yet
- Induction Motor DesignDocument34 pagesInduction Motor DesignNasr GhanmiNo ratings yet
- Voltage Regulation of Three-Phase AlternatorDocument10 pagesVoltage Regulation of Three-Phase AlternatorNAYEEM100% (1)
- Power System Compensation Using Passive and Facts Controller NumericalDocument11 pagesPower System Compensation Using Passive and Facts Controller Numericalsoumyadeep mukherjeeNo ratings yet
- 12.tested Lab of Electrical Machine and EquipmentDocument6 pages12.tested Lab of Electrical Machine and EquipmentRajuNo ratings yet
- Ac Potentiometers: DefinitionDocument4 pagesAc Potentiometers: DefinitionjayNo ratings yet
- NEPCO Grid Code IRR-TIC 2015 - 07 - 16 v2 PDFDocument28 pagesNEPCO Grid Code IRR-TIC 2015 - 07 - 16 v2 PDFAta AtefNo ratings yet
- Impedance MeasurementDocument2 pagesImpedance MeasurementAhsan KaziNo ratings yet
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- CT For Protection: Prof.O.V.Gnana SwathikaDocument24 pagesCT For Protection: Prof.O.V.Gnana SwathikaSarthak VatsNo ratings yet
- Bundled Conductors PDFDocument2 pagesBundled Conductors PDFSureshraja9977No ratings yet
- Potential TransformerDocument8 pagesPotential TransformermnotcoolNo ratings yet
- Electrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Document5 pagesElectrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Danial AkramNo ratings yet
- Open Circuit Saturation Curve of An Alternator-EXPT8Document2 pagesOpen Circuit Saturation Curve of An Alternator-EXPT8Karl Joseph Chua Villariña100% (3)
- Parallel Operation of Two Single Phase Transformers: Experiment No: 05Document18 pagesParallel Operation of Two Single Phase Transformers: Experiment No: 05Bhanoth MohanNo ratings yet
- Retardation TestDocument53 pagesRetardation Testkiran_y2100% (9)
- Site Testing Pre Commissioning PDFDocument2 pagesSite Testing Pre Commissioning PDFadi nugrohoNo ratings yet
- OC and SC Test On Single Phase TransformerDocument5 pagesOC and SC Test On Single Phase TransformerhavejsnjNo ratings yet
- Experiment# 10: Measure The Power and Power Factor by Three Ammeter MethodDocument10 pagesExperiment# 10: Measure The Power and Power Factor by Three Ammeter MethodFarwa MunirNo ratings yet
- Open Circuit Characteristics of DC Shunt GeneratorDocument6 pagesOpen Circuit Characteristics of DC Shunt GeneratorBalagam RupaNo ratings yet
- Jawaharlal Nehru Engineering College: Laboratory ManualDocument36 pagesJawaharlal Nehru Engineering College: Laboratory Manualprathap kumarNo ratings yet
- Electrical Machine Lab ManualDocument61 pagesElectrical Machine Lab ManualPrem SharmaNo ratings yet
- EM&IDocument34 pagesEM&IAnonymous m8oCtJBNo ratings yet
- Electrical Machine & InstrumentationDocument34 pagesElectrical Machine & InstrumentationJeremy HensleyNo ratings yet
- Sr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorDocument40 pagesSr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorSagar G ReddyNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Walvoil Ve-B 14-NCDocument4 pagesWalvoil Ve-B 14-NCcsimoesNo ratings yet
- 1.3.1 General: 1.3.1.1 Drawing Sheet SizesDocument4 pages1.3.1 General: 1.3.1.1 Drawing Sheet SizesEDEN JIMENEZNo ratings yet
- Solar Powered Grass Cutting Robot Using IotDocument20 pagesSolar Powered Grass Cutting Robot Using IotDebashishParidaNo ratings yet
- Cost Schedule Optcl FullDocument12 pagesCost Schedule Optcl FullMOHIT KaushalNo ratings yet
- Operating Manual: Recirculating CoolersDocument3 pagesOperating Manual: Recirculating CoolersAli PuadNo ratings yet
- FBM222, Redundant PROFIBUS Communication Interface ModuleDocument12 pagesFBM222, Redundant PROFIBUS Communication Interface ModuleAnas Sakr100% (1)
- RAIDER R150 High (FU150SCDX2L5-P31)Document70 pagesRAIDER R150 High (FU150SCDX2L5-P31)GAYLE GONo ratings yet
- Power FactorDocument27 pagesPower Factorapi-232121477No ratings yet
- Can Making SolutionsDocument6 pagesCan Making SolutionsbismarckNo ratings yet
- iSitePower Integrated Smart Site V100R001C00 User Manual (ICC1000-A1-E1)Document179 pagesiSitePower Integrated Smart Site V100R001C00 User Manual (ICC1000-A1-E1)Albert MantizaNo ratings yet
- Request For Quotation: Due Date 03.MAR.2017 Time: 13:00 HRSDocument224 pagesRequest For Quotation: Due Date 03.MAR.2017 Time: 13:00 HRSkajale.shrikantNo ratings yet
- Air Borne Wind TurbineDocument9 pagesAir Borne Wind TurbineADAM ISMAILNo ratings yet
- Maruti Genuine Parts List 2009 PDFDocument1,836 pagesMaruti Genuine Parts List 2009 PDFfrintorappaiNo ratings yet
- Polygon Catalogue - April 2022Document53 pagesPolygon Catalogue - April 2022SumitNo ratings yet
- Aignerr KatalogDocument70 pagesAignerr Katalogванек долдаNo ratings yet
- Group 5 Electrical SystemDocument2 pagesGroup 5 Electrical SystemSaidi JalelNo ratings yet
- Enerpac Pump SchematicDocument108 pagesEnerpac Pump Schematicjace100% (2)
- Basic Installation of A RegulatorDocument2 pagesBasic Installation of A RegulatorSergio Gaete CovarrubiasNo ratings yet
- Specifications of Twin Head GrinderDocument20 pagesSpecifications of Twin Head GrinderchandruNo ratings yet
- OSUNG ControllerDocument3 pagesOSUNG ControllertuanvuttNo ratings yet
- South Bend Lathe TrainingDocument68 pagesSouth Bend Lathe TrainingSMWilson100% (2)
- Data BCV 275-50 E2-FDocument4 pagesData BCV 275-50 E2-FHoang Minh HungNo ratings yet
- GASCO Ruwais Report Pump and Its Component 14-07-14Document35 pagesGASCO Ruwais Report Pump and Its Component 14-07-14Usama ArifNo ratings yet
- STC Valve1375 0027 401Document14 pagesSTC Valve1375 0027 401Gilbert Mejulio100% (2)
- FDS6930 PDFDocument5 pagesFDS6930 PDFTut MorisNo ratings yet
- Schneider Electric-LA2-DT2-datasheet1-1053880102 PDFDocument38 pagesSchneider Electric-LA2-DT2-datasheet1-1053880102 PDFdanysaavedraNo ratings yet