Download as pdf or txt
You might also like
- Brahmastra Formula Book 2nd Edition by Aditya Ranjan SirDocument297 pagesBrahmastra Formula Book 2nd Edition by Aditya Ranjan SirVihaan Sharma61% (18)
- Introduction to Time Series and Forecasting【solution manual 】Document46 pagesIntroduction to Time Series and Forecasting【solution manual 】Grey Baoyin79% (24)
- McGraw Hill Ryerson Advanced Functions 12Document6 pagesMcGraw Hill Ryerson Advanced Functions 12bob bobNo ratings yet
- Mathematics: Grades 7-12Document28 pagesMathematics: Grades 7-12Janice evansNo ratings yet
- A Generalized Residual Information Measure and Its PropertiesDocument8 pagesA Generalized Residual Information Measure and Its PropertiesZahid BhatNo ratings yet
- Tutorial1 20Document2 pagesTutorial1 20Er Rudrasen PalNo ratings yet
- Lecture 1: Entropy and Mutual Information: 2.1 ExampleDocument8 pagesLecture 1: Entropy and Mutual Information: 2.1 ExampleLokesh SinghNo ratings yet
- CMDE Volume 6 Issue 4 Pages 411-425Document15 pagesCMDE Volume 6 Issue 4 Pages 411-425Antonio Torres PeñaNo ratings yet
- Opuscula Math 3205 PDFDocument8 pagesOpuscula Math 3205 PDFAntonio Torres PeñaNo ratings yet
- Ee5143 Pset1 PDFDocument4 pagesEe5143 Pset1 PDFSarthak VoraNo ratings yet
- Hartman-Grobman Theorem and Normal FormsDocument18 pagesHartman-Grobman Theorem and Normal FormslucassecoNo ratings yet
- Gradient Flow PDFDocument62 pagesGradient Flow PDFJhon Edison Bravo BuitragoNo ratings yet
- Lecture 8: Channel Capacity, Continuous Random Variables: 1.1 ExamplesDocument6 pagesLecture 8: Channel Capacity, Continuous Random Variables: 1.1 Examplessanjay singhNo ratings yet
- 3 HandoutDocument6 pages3 Handoutaladar520No ratings yet
- Homework Set 5: Due September 18Document3 pagesHomework Set 5: Due September 18jog10No ratings yet
- Periodic Graphs: Chris GodsilDocument15 pagesPeriodic Graphs: Chris GodsilartovolastiNo ratings yet
- Lecture No.6Document8 pagesLecture No.6Awais RaoNo ratings yet
- Ejercicios Munkres ResueltosDocument28 pagesEjercicios Munkres ResueltosEduar CastañedaNo ratings yet
- Set Valued Fractional Order DiffereDocument11 pagesSet Valued Fractional Order Differehovu.hutechNo ratings yet
- New Estimates For Exponentially Convex Functions Via Conformable Fractional OperatorDocument16 pagesNew Estimates For Exponentially Convex Functions Via Conformable Fractional OperatorSo NiaNo ratings yet
- Lecture No.6Document8 pagesLecture No.6MUHAMMAD USMANNo ratings yet
- Revised Course NotesDocument84 pagesRevised Course Notestangbowei39No ratings yet
- 3.2 the Exponential, Gamma, And Chi-Square Distributions 習題Document7 pages3.2 the Exponential, Gamma, And Chi-Square Distributions 習題sandywu930510No ratings yet
- Quantum Field Theory: Graeme Segal December 5, 2008Document16 pagesQuantum Field Theory: Graeme Segal December 5, 2008Zaratustra NietzcheNo ratings yet
- SolutionDocument4 pagesSolutionAssanga RonaldNo ratings yet
- Beamer RodiakDocument35 pagesBeamer Rodiakrodiak465006No ratings yet
- Inequalities of Hermite-Hadamard Type For HH - Convex FunctionsDocument12 pagesInequalities of Hermite-Hadamard Type For HH - Convex FunctionsanamNo ratings yet
- 1.4 Classification of Integral EquationsDocument11 pages1.4 Classification of Integral EquationszakariaNo ratings yet
- 2 HandoutDocument6 pages2 Handoutaladar520No ratings yet
- Lecture Notes 1: Brief Review of Basic Probability (Casella and Berger Chapters 1-4)Document14 pagesLecture Notes 1: Brief Review of Basic Probability (Casella and Berger Chapters 1-4)ravikumar rayalaNo ratings yet
- Introduction To Algebraic Topology - Gottsche, LotharDocument52 pagesIntroduction To Algebraic Topology - Gottsche, LotharLucas KevinNo ratings yet
- 2Document1 page2OlaNo ratings yet
- Higgs LHCDocument85 pagesHiggs LHCcifarha venantNo ratings yet
- Extreme Behavior of Bivariate Elliptical Distributions: Alexandru V. Asimit, Bruce L. JonesDocument9 pagesExtreme Behavior of Bivariate Elliptical Distributions: Alexandru V. Asimit, Bruce L. JonesMahfudhotinNo ratings yet
- A12 Rodiak GermanDocument12 pagesA12 Rodiak GermanGerman LozadaNo ratings yet
- STUDY182@942803Document6 pagesSTUDY182@942803Aamir RazaNo ratings yet
- ACTS 6306: Lecture Notes: Part 5 Bayesian Credibility: Continuous Model and PriorDocument10 pagesACTS 6306: Lecture Notes: Part 5 Bayesian Credibility: Continuous Model and PriortaoranqiuNo ratings yet
- AA278A Lecture Notes 8. Optimal Control and Dynamic Games: Claire J. Tomlin May 11, 2005Document12 pagesAA278A Lecture Notes 8. Optimal Control and Dynamic Games: Claire J. Tomlin May 11, 2005Abdoulaye CisseNo ratings yet
- + 1 D K D K J K K K 1 K K K T K T K 0Document24 pages+ 1 D K D K J K K K 1 K K K T K T K 0Alvaro CorvalanNo ratings yet
- Probability Theory Lecture Notes 13Document3 pagesProbability Theory Lecture Notes 13Xing QiuNo ratings yet
- FishingDocument10 pagesFishingvickyNo ratings yet
- Existence of Almost Automorphic Solutions of Neutral Functional Differential EquationDocument8 pagesExistence of Almost Automorphic Solutions of Neutral Functional Differential Equationsghoul795No ratings yet
- Singular Traces of An Integral Operator Related To The Riemann HypothesisDocument18 pagesSingular Traces of An Integral Operator Related To The Riemann HypothesisEmperatriz VelaNo ratings yet
- Analytical Solution For A Coupled of Nonlinear Integral Equations Via Coupled Fixed Point TechniqueDocument10 pagesAnalytical Solution For A Coupled of Nonlinear Integral Equations Via Coupled Fixed Point TechniqueAnonymous K35fDOoCYNo ratings yet
- CS321 Numerical AnalysisDocument53 pagesCS321 Numerical AnalysisJoy loboNo ratings yet
- Exercise 2Document2 pagesExercise 2ParanoidNo ratings yet
- Risk Theory Supportive Notes (Spring 2015) : 1.1 Models For Individual ClaimsDocument19 pagesRisk Theory Supportive Notes (Spring 2015) : 1.1 Models For Individual Claimsdavid AbotsitseNo ratings yet
- An Introduction To Rough PathsDocument59 pagesAn Introduction To Rough PathsAriel MorgensternNo ratings yet
- Integrodifferential Equations With Parameter-Dependent OperatorsDocument13 pagesIntegrodifferential Equations With Parameter-Dependent OperatorsLuis FuentesNo ratings yet
- Minkowski Inequality 123Document5 pagesMinkowski Inequality 123Alfira Amalia AmaliaNo ratings yet
- Kac-Moody Algebras and Lie Algebras of Regular Vector Fields On ToriDocument20 pagesKac-Moody Algebras and Lie Algebras of Regular Vector Fields On ToriLuis FuentesNo ratings yet
- Stochastic ProcessesDocument7 pagesStochastic ProcessesmekaNo ratings yet
- QED ICTP Note0Document113 pagesQED ICTP Note0Salim DávilaNo ratings yet
- Sastry Optimal 2021Document15 pagesSastry Optimal 2021Arthur CostaNo ratings yet
- Homework 6: AMATH 353 Partial Differential Equations and Waves Weston Barger Summer 2016Document2 pagesHomework 6: AMATH 353 Partial Differential Equations and Waves Weston Barger Summer 2016ranvNo ratings yet
- Fractional Calculus and The Schrödinger Equation Enrico Scalas Dumitru Baleanu, Francesco Mainardi, Antonio MuraDocument4 pagesFractional Calculus and The Schrödinger Equation Enrico Scalas Dumitru Baleanu, Francesco Mainardi, Antonio MuraVignesh RamakrishnanNo ratings yet
- Derivada FraccionalDocument18 pagesDerivada FraccionalAlan AlcantarNo ratings yet
- Ph.D. Qualifying Exam, Real Analysis Fall 2009,: J J 1 N 1 N N 1 NDocument2 pagesPh.D. Qualifying Exam, Real Analysis Fall 2009,: J J 1 N 1 N N 1 NpaimoNo ratings yet
- 2022 - Week - 2 - Ch.2 RV and Stochastic ProbDocument15 pages2022 - Week - 2 - Ch.2 RV and Stochastic Probseungnam kimNo ratings yet
- Probability Space and Random Variable ProportiesDocument21 pagesProbability Space and Random Variable ProportieswandileNo ratings yet
- Lecture8 S21Document19 pagesLecture8 S21asanithanair35No ratings yet
- Stewart CalcET9e 07 08Document22 pagesStewart CalcET9e 07 08林同學No ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Semigroup Theory: 1. The Basic ConceptDocument51 pagesSemigroup Theory: 1. The Basic ConceptIbrahimNo ratings yet
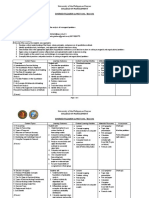
- MGT 181 Syllabus OBE Jan2016-FDDocument6 pagesMGT 181 Syllabus OBE Jan2016-FDKristine Astorga-NgNo ratings yet
- Lecture 11 Notes, Electromagnetic Theory II: 1. Einstein's Principle of RelativityDocument10 pagesLecture 11 Notes, Electromagnetic Theory II: 1. Einstein's Principle of Relativity*83*22*No ratings yet
- Fundamentals of Probability: Solutions To Self-Quizzes and Self-TestsDocument7 pagesFundamentals of Probability: Solutions To Self-Quizzes and Self-TestsRaul Santillana QuispeNo ratings yet
- Java Code Lab)Document3 pagesJava Code Lab)peace_edafeNo ratings yet
- TSQRDocument2 pagesTSQRMelinda MillerNo ratings yet
- Cse 321 HW05Document2 pagesCse 321 HW05tubaNo ratings yet
- Lesson Outline Grade 9 and 10 SY 2022-23Document12 pagesLesson Outline Grade 9 and 10 SY 2022-23Hassan AliNo ratings yet
- Picking Winners: A Framework For Venture Capital InvestmentDocument30 pagesPicking Winners: A Framework For Venture Capital InvestmentkaltsturmNo ratings yet
- Stat110 Cheatsheet PDFDocument2 pagesStat110 Cheatsheet PDFMaxNo ratings yet
- 3130 01 5RP AFP tcm142-665793Document15 pages3130 01 5RP AFP tcm142-665793Manal AlaminNo ratings yet
- Effectiveness of Project Renrich in Improving The Numeracy Skills of Grade 5 LearnersDocument7 pagesEffectiveness of Project Renrich in Improving The Numeracy Skills of Grade 5 LearnersPsychology and Education: A Multidisciplinary JournalNo ratings yet
- Walsh HadamardDocument4 pagesWalsh HadamardXavierNo ratings yet
- Circles PDFDocument9 pagesCircles PDFbansallove2008No ratings yet
- Linear Algebra For Pattern Processing: Projection, Singular Value Decomposition, and PseudoinverseDocument155 pagesLinear Algebra For Pattern Processing: Projection, Singular Value Decomposition, and Pseudoinversevic1234059No ratings yet
- A Note On Abelian Subgroups of Maximal OrderDocument16 pagesA Note On Abelian Subgroups of Maximal OrderStefanos AivazidisNo ratings yet
- JPWPKL Trial 2010 p2 Mark SchemeDocument11 pagesJPWPKL Trial 2010 p2 Mark Schemetan_wooichoongNo ratings yet
- NewtonDocument48 pagesNewtonArsene MawejaNo ratings yet
- I. Objectives: A Detailed Lesson PlanDocument10 pagesI. Objectives: A Detailed Lesson PlanKimberly TugadeNo ratings yet
- Lec 0813Document10 pagesLec 0813Chevy TeoNo ratings yet
- Swarm Optimization Algorithms For Face Recognition: Juicy RayDocument40 pagesSwarm Optimization Algorithms For Face Recognition: Juicy RayIshita VishnoiNo ratings yet
- MSC MBA Prospectus Final Autumn-2020 PDFDocument47 pagesMSC MBA Prospectus Final Autumn-2020 PDFMuhammad AyazNo ratings yet
- Template - Assignment 1 SM015 2020-2021 PDFDocument2 pagesTemplate - Assignment 1 SM015 2020-2021 PDFKKNo ratings yet
- Exponentials and LogsDocument25 pagesExponentials and LogsAtang GasegaleNo ratings yet
- Tle-10 Ict Quarter 1 Module 1 (Babatuan)Document14 pagesTle-10 Ict Quarter 1 Module 1 (Babatuan)Shua HongNo ratings yet
- Chapter 10 PDFDocument30 pagesChapter 10 PDFBella CarrNo ratings yet