Download as pdf or txt
You might also like
- Back PropagationDocument33 pagesBack PropagationRoots999No ratings yet
- Sesi#2 - WJ - Artificial Neural NetworkDocument69 pagesSesi#2 - WJ - Artificial Neural NetworkDwiki KurniaNo ratings yet
- ECSE484 Intro v2Document67 pagesECSE484 Intro v2Zaid SulaimanNo ratings yet
- Deep Learning HardwareDocument82 pagesDeep Learning HardwareblackgenNo ratings yet
- Shallow Neural NetworkDocument152 pagesShallow Neural NetworkSreetam GangulyNo ratings yet
- Machine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)Document14 pagesMachine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)harutyunNo ratings yet
- Echo State Network - ScholarpediaDocument4 pagesEcho State Network - Scholarpediainkheart2349No ratings yet
- DL Concepts 1 OverviewDocument80 pagesDL Concepts 1 OverviewB PrasadNo ratings yet
- Ann MPDMDocument61 pagesAnn MPDMsidra shafiqNo ratings yet
- CNN and Gan: Introduction ToDocument58 pagesCNN and Gan: Introduction ToGopiNath VelivelaNo ratings yet
- BMM 2018 - Deep Learning TutorialDocument47 pagesBMM 2018 - Deep Learning TutorialaraghunathreddyraghunathNo ratings yet
- Iv. Single Layer Structures: 4.1. PerceptronsDocument26 pagesIv. Single Layer Structures: 4.1. PerceptronsYunus KoçNo ratings yet
- A108 Rosenberg SuppDocument10 pagesA108 Rosenberg Suppsabitha sabesanNo ratings yet
- Unit 2 - Soft ComputingDocument49 pagesUnit 2 - Soft ComputingNitesh NemaNo ratings yet
- Machine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)Document14 pagesMachine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)dollsicecreamNo ratings yet
- 001 IntroDocument66 pages001 IntromanikNo ratings yet
- MachinelearninghghghgDocument17 pagesMachinelearninghghghgMaRsHallNo ratings yet
- Multi-Dimensional Neural Networks: Unified Theory: Garimella RamamurthyDocument22 pagesMulti-Dimensional Neural Networks: Unified Theory: Garimella RamamurthyvivekolaNo ratings yet
- Introduction To Artificial Neural NetworksDocument70 pagesIntroduction To Artificial Neural Networksmadhu shree mNo ratings yet
- Artificial Neural Network (ANN) : Duration: 8 Hrs OutlineDocument61 pagesArtificial Neural Network (ANN) : Duration: 8 Hrs Outlineanhtu9_910280373No ratings yet
- Artificial Neural NetworksDocument44 pagesArtificial Neural NetworksMuhanad Al-khalisyNo ratings yet
- Pseudo Label FinalDocument6 pagesPseudo Label FinaljustinthecoachNo ratings yet
- Artificial Neural NetworksDocument82 pagesArtificial Neural NetworksPranzal SharmaNo ratings yet
- Lecture 4Document50 pagesLecture 4Rakshith KamathNo ratings yet
- Supervised Learning Neural NetworksDocument34 pagesSupervised Learning Neural NetworksLekshmiNo ratings yet
- Matrix Pseudoinversion For Image Neural ProcessingDocument17 pagesMatrix Pseudoinversion For Image Neural ProcessingAtınç YılmazNo ratings yet
- Neural NetworksDocument42 pagesNeural NetworksTharun RaajNo ratings yet
- Multilayer Perceptrons and Backpropagation Learning: 1 Some HistoryDocument6 pagesMultilayer Perceptrons and Backpropagation Learning: 1 Some HistoryIgnacio IriarteNo ratings yet
- Lec10 HandoutDocument41 pagesLec10 HandoutSaswati BanerjeeNo ratings yet
- A Connection Between Score MatchingDocument13 pagesA Connection Between Score MatchingPixel DinosaurNo ratings yet
- Submitted By: Alka Gupta 2011emcs01Document18 pagesSubmitted By: Alka Gupta 2011emcs01Rajesh GuptaNo ratings yet
- Large Scale Deep LearningDocument170 pagesLarge Scale Deep Learningpavancreative81No ratings yet
- Multi Layer PerceptronDocument62 pagesMulti Layer PerceptronKishan Kumar GuptaNo ratings yet
- ARTIFICIAL NEURAL NETWORKS-moduleIIIDocument61 pagesARTIFICIAL NEURAL NETWORKS-moduleIIIelakkadanNo ratings yet
- Lecture Three Multi-Layer Perceptron: Backpropagation: Part I: Fundamentals of Neural NetworksDocument70 pagesLecture Three Multi-Layer Perceptron: Backpropagation: Part I: Fundamentals of Neural NetworksWantong LiaoNo ratings yet
- Neural Networks ThreeDocument60 pagesNeural Networks Threejunleeeeee3No ratings yet
- Neural Network Learning Dynamics Analysis: Articles You May Be Interested inDocument5 pagesNeural Network Learning Dynamics Analysis: Articles You May Be Interested inerick ramosNo ratings yet
- Be CentralDocument98 pagesBe CentralAdrian Ion-MargineanuNo ratings yet
- A Connection Between Score Matching and Denoising AutoencodersDocument14 pagesA Connection Between Score Matching and Denoising AutoencodersalekthieryNo ratings yet
- Unit 11-LSTM-CNNDocument72 pagesUnit 11-LSTM-CNN陳力熊No ratings yet
- Deep Learning Meets Sparse Regularization: A Signal Processing PerspectiveDocument23 pagesDeep Learning Meets Sparse Regularization: A Signal Processing PerspectiveJuan ZarateNo ratings yet
- Machine Learning: Algorithms and Applications: Philip O. OgunbonaDocument29 pagesMachine Learning: Algorithms and Applications: Philip O. OgunbonaNguyễn Hoàng Phương TrầnNo ratings yet
- Trebuie Sa Bag Asta UndevaDocument12 pagesTrebuie Sa Bag Asta UndevaAnton StefanNo ratings yet
- A Presentation On: By: EdutechlearnersDocument33 pagesA Presentation On: By: EdutechlearnersshardapatelNo ratings yet
- Self-Normalizing Neural Networks PDFDocument102 pagesSelf-Normalizing Neural Networks PDFyuyiipNo ratings yet
- Lecture 11 Dimensionality ReductionDocument32 pagesLecture 11 Dimensionality ReductionLIU HengxuNo ratings yet
- Part BDocument36 pagesPart BAngieNo ratings yet
- 2021 UNAS REFER Rafi Yon Saputra 173112706420242 Kernel PrimerDocument65 pages2021 UNAS REFER Rafi Yon Saputra 173112706420242 Kernel PrimerRafi Y.SNo ratings yet
- Evolving Neural Network Using Real Coded Genetic Algorithm (GA) For Multispectral Image ClassificationDocument13 pagesEvolving Neural Network Using Real Coded Genetic Algorithm (GA) For Multispectral Image Classificationjkl316No ratings yet
- FRJ PaperDocument9 pagesFRJ PaperMattNo ratings yet
- FTML - Learning Deep Architectures For AI - Slidesbengio - 2009 PDFDocument87 pagesFTML - Learning Deep Architectures For AI - Slidesbengio - 2009 PDFajgallegoNo ratings yet
- Paper 422Document9 pagesPaper 422KEREN EVANGELINE I (RA1913011011002)No ratings yet
- CC511 Week 5 - 6 - NN - BPDocument62 pagesCC511 Week 5 - 6 - NN - BPmohamed sherifNo ratings yet
- CH 2. Learning Processes: (N) e (N) D (N) - y (N)Document11 pagesCH 2. Learning Processes: (N) e (N) D (N) - y (N)casio2008No ratings yet
- Time-Series Prediction Using A Local Linear Wavelet Neural NetworkDocument17 pagesTime-Series Prediction Using A Local Linear Wavelet Neural NetworksadaimiNo ratings yet
- Fey, Yuen, Weichert - 2020 - Hierarchical Inter-Message Passing For Learning On Molecular GraphsDocument6 pagesFey, Yuen, Weichert - 2020 - Hierarchical Inter-Message Passing For Learning On Molecular Graphsrenly XNNo ratings yet
- Modern CNN ArchitecturesDocument32 pagesModern CNN ArchitecturesArafat HossainNo ratings yet
- Artificial Neural Networks Notes PDFDocument27 pagesArtificial Neural Networks Notes PDFch raja100% (1)
- Chapter 9Document9 pagesChapter 9Raja ManikamNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Janeshia Davis Exec Summary 3Document1 pageJaneshia Davis Exec Summary 3api-353427430No ratings yet
- Edu 201 Lesson Planning Assessment Audrey WoodDocument29 pagesEdu 201 Lesson Planning Assessment Audrey Woodapi-610748030No ratings yet
- Promoting Creative Learning and CreativityDocument21 pagesPromoting Creative Learning and CreativitySarah Jane Morata AbsalonNo ratings yet
- Van Raalte 2016 - Self Talk RiviewDocument45 pagesVan Raalte 2016 - Self Talk RiviewNandaNo ratings yet
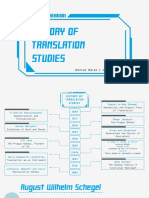
- History of Translation StudiesDocument14 pagesHistory of Translation StudiesRica CapaNo ratings yet
- Thinking Skills and Bloom'S Taxonomy: John CrosslandDocument3 pagesThinking Skills and Bloom'S Taxonomy: John CrosslandDerrick SumNo ratings yet
- What Are Semantic ExplicationsDocument3 pagesWhat Are Semantic ExplicationspolysemyNo ratings yet
- Wodak - Global and Local Patterns in Political Discourses - 'Glocalisation' PDFDocument5 pagesWodak - Global and Local Patterns in Political Discourses - 'Glocalisation' PDFsupportisraelNo ratings yet
- Consumer Behavior Chapter 1-3Document14 pagesConsumer Behavior Chapter 1-3Angeline GambaNo ratings yet
- Rod Ellis - Current Issues in Teaching Grammar and SLA Perspective PDFDocument26 pagesRod Ellis - Current Issues in Teaching Grammar and SLA Perspective PDFYumi MeeksGiz Sawabe100% (4)
- Psychological Perspective of The SelfDocument15 pagesPsychological Perspective of The Selfprinz19No ratings yet
- Sally Derrick Consultation Skills - 05.09.2019Document25 pagesSally Derrick Consultation Skills - 05.09.2019MrEnttNo ratings yet
- Itp MCQ TestDocument4 pagesItp MCQ TestMegha BansalNo ratings yet
- Modeling GuidelinesDocument2 pagesModeling GuidelinesFirst LastNo ratings yet
- iNTRO TO lINGUISTICS sYLLABUSDocument10 pagesiNTRO TO lINGUISTICS sYLLABUSFrancisco Palma IIINo ratings yet
- FS2 - Learning Episode 7 Guiding Principles in The Selection and Use of Teaching MethodsDocument10 pagesFS2 - Learning Episode 7 Guiding Principles in The Selection and Use of Teaching Methodssheilajanedlasala100% (1)
- CBI Session Plan. BalasudarsunDocument2 pagesCBI Session Plan. BalasudarsunPankaj ChandiramaniNo ratings yet
- Cagayan de Oro College: Phinma Education NetworkDocument11 pagesCagayan de Oro College: Phinma Education NetworkMarc MorenoNo ratings yet
- One Minute Paper 12Document5 pagesOne Minute Paper 12dgratyNo ratings yet
- Calinan Lam Adventist Academy, Inc.: "A Center For Your Child's Total Development"Document3 pagesCalinan Lam Adventist Academy, Inc.: "A Center For Your Child's Total Development"Jastine Fritz Mahinay MontealtoNo ratings yet
- Expressive Means (Em) and Stylistic Devices (SD)Document4 pagesExpressive Means (Em) and Stylistic Devices (SD)Анна СухопароваNo ratings yet
- An Overview of Empirical Natural Language Processing: Eric Brill and Raymond J. MooneyDocument12 pagesAn Overview of Empirical Natural Language Processing: Eric Brill and Raymond J. MooneyAravind SankarNo ratings yet
- AB Level 1 Unit A2 Progression Plan (Update 19 Mac)Document4 pagesAB Level 1 Unit A2 Progression Plan (Update 19 Mac)latifah2080No ratings yet
- Lesson 4 - TTL 1 Educ 302Document46 pagesLesson 4 - TTL 1 Educ 302Mark Jerick RamosNo ratings yet
- Psychological Skills Questionnaire or EvaluationDocument7 pagesPsychological Skills Questionnaire or Evaluationapi-248980126No ratings yet
- Articleno.2016 (Alat Ukur KD)Document13 pagesArticleno.2016 (Alat Ukur KD)ANETHA FERDERIKA JUNIASINo ratings yet
- Langue and ParoleDocument1 pageLangue and ParoleredaNo ratings yet
- San Rafael Campus: Purposive CommunicationDocument2 pagesSan Rafael Campus: Purposive Communicationنجشو گحوشNo ratings yet
- Effects of The Language Barriers (Research Paper)Document20 pagesEffects of The Language Barriers (Research Paper)Abegail Beguiras100% (5)
- Vygotsky's Socio-Cultural TheoryDocument4 pagesVygotsky's Socio-Cultural TheoryNina londoNo ratings yet