
Spreying and Seeding Robo".: Design and Operation of Agriculture Based Pesticide Spraying and Seeding Robot
Spreying and Seeding Robo".: Design and Operation of Agriculture Based Pesticide Spraying and Seeding Robot
You might also like
- A Technical Seminar Report 443Document31 pagesA Technical Seminar Report 443Gayathri YaddalaNo ratings yet
- Android Phone Controlled Bluetooth Robot: April 2016Document12 pagesAndroid Phone Controlled Bluetooth Robot: April 2016Fakhr Al-TimimiNo ratings yet
- Android Phone Controlled Bluetooth RobotDocument12 pagesAndroid Phone Controlled Bluetooth RobotNazmul Shikder RiyadhNo ratings yet
- Solar Powered Mobile Operated Smart Multifunction Agriculture RobotDocument4 pagesSolar Powered Mobile Operated Smart Multifunction Agriculture RobotVIVA-TECH IJRINo ratings yet
- FireDocument14 pagesFireffire0502No ratings yet
- Irjet V7i61194Document4 pagesIrjet V7i61194Aryan ShrivaNo ratings yet
- Design and Development of Automatic Floor Cleaning Robot Using Mega 328PDocument7 pagesDesign and Development of Automatic Floor Cleaning Robot Using Mega 328Pwww.sangug06No ratings yet
- A On "Capsten Project Planning (CPP) - 22058" Topic - Voice Control Robot CarDocument18 pagesA On "Capsten Project Planning (CPP) - 22058" Topic - Voice Control Robot CarViresh bhoirNo ratings yet
- Segway: School of Electronics EngineeringDocument17 pagesSegway: School of Electronics EngineeringSMNo ratings yet
- Solar Powered Grass Cutter and Pesticide Spreading RobotDocument4 pagesSolar Powered Grass Cutter and Pesticide Spreading RobotNeha SurwaseNo ratings yet
- IRJET V7I5770 With Cover Page v2Document6 pagesIRJET V7I5770 With Cover Page v2pal sarveshNo ratings yet
- PLC Based Waste Management RobotDocument3 pagesPLC Based Waste Management RobotkirubelNo ratings yet
- Bharath Fire Fighting RobotDocument43 pagesBharath Fire Fighting RobotDebojit DasNo ratings yet
- Bluetooth Control RobotDocument20 pagesBluetooth Control RobotSyed arefinNo ratings yet
- FIRE FIGHTING ROBOT (Mini Project)Document21 pagesFIRE FIGHTING ROBOT (Mini Project)Hisham Kunjumuhammed100% (2)
- Chapter 222 LabviewDocument65 pagesChapter 222 LabviewRahul Virmani100% (1)
- Venu PKDocument9 pagesVenu PKVenu Venupk1431No ratings yet
- Wireless 4 Dof Robotic Arm Using Mega 2560-1Document11 pagesWireless 4 Dof Robotic Arm Using Mega 2560-1Kamal HasanNo ratings yet
- Automatic Paint Spraying Machine Using IR Sensor: Abstract: The Primary Aim of The Project Is To Design, DevelopDocument3 pagesAutomatic Paint Spraying Machine Using IR Sensor: Abstract: The Primary Aim of The Project Is To Design, DevelopSANAPA TEJASWININo ratings yet
- Bluetooth Car Using ArduinoDocument9 pagesBluetooth Car Using ArduinoVenu Venupk1431No ratings yet
- Garbage Collection Robot Using Wireless CommunicationsDocument20 pagesGarbage Collection Robot Using Wireless Communicationsvishalpawar050No ratings yet
- Android Mobile Phone Controlled Bluetooth Robot Using 8051 MicrocontrollerDocument4 pagesAndroid Mobile Phone Controlled Bluetooth Robot Using 8051 MicrocontrollerSanzu PebrurisNo ratings yet
- Smart Floor Cleaner Robot Using AndroidDocument5 pagesSmart Floor Cleaner Robot Using AndroidTejas chogale100% (1)
- Solar Based Agriculture TractorDocument23 pagesSolar Based Agriculture TractoryashNo ratings yet
- Agriculture Robotic Vehicles Based PestisideDocument4 pagesAgriculture Robotic Vehicles Based PestisideBiruNo ratings yet
- RF Controlled Solar Panel Based Robotic VehicleDocument6 pagesRF Controlled Solar Panel Based Robotic VehicleMohan Babu ANo ratings yet
- Ijeee-V6i4p102 Seminar 2Document4 pagesIjeee-V6i4p102 Seminar 2tesla231004No ratings yet
- Speed Control of AC Motor: International Journal of Innovative Technology and Exploring Engineering February 2021Document4 pagesSpeed Control of AC Motor: International Journal of Innovative Technology and Exploring Engineering February 2021SABARISH MechanicalNo ratings yet
- Irjet V4i4783 PDFDocument3 pagesIrjet V4i4783 PDFBipin S CNo ratings yet
- Team - CuriosityDocument5 pagesTeam - CuriositySakib RatulNo ratings yet
- Agribot: An Agriculture Robot: Vol. 4, Issue 1, January 2015Document3 pagesAgribot: An Agriculture Robot: Vol. 4, Issue 1, January 2015Mohammad Tahir Khan NiaziNo ratings yet
- Agriculture Robotic Vehicles Based Pesticides SprayerDocument4 pagesAgriculture Robotic Vehicles Based Pesticides Sprayerlikhith dogiparthiNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- Spy Robot Wireless Video Surveillance Using ArduinoDocument5 pagesSpy Robot Wireless Video Surveillance Using ArduinoEyob SintNo ratings yet
- Arduino Based Solar Operated Grass Cutter: Shivani A. Raut, R. J. BhiwaniDocument12 pagesArduino Based Solar Operated Grass Cutter: Shivani A. Raut, R. J. BhiwaniVj Vicky's100% (1)
- Vehicle Monitoring Controlling and Tracking System by Using Android ApplicationDocument7 pagesVehicle Monitoring Controlling and Tracking System by Using Android Applicationنائب إبليسNo ratings yet
- Development of An Obstacle Avoiding Robot: December 2015Document10 pagesDevelopment of An Obstacle Avoiding Robot: December 2015NIDHIN COCHINNo ratings yet
- Android Application Based Speed Control of A MotorDocument2 pagesAndroid Application Based Speed Control of A MotorVarun VadluriNo ratings yet
- سفاريDocument3 pagesسفاريhawrasdqNo ratings yet
- Gripper Robot: Solution Architecture Document ProjectDocument9 pagesGripper Robot: Solution Architecture Document Projectmonika nagarNo ratings yet
- Title: Bluetooth Based Robot: Submition Date Sat, 17 July Submited To Dr.R.GoppyDocument19 pagesTitle: Bluetooth Based Robot: Submition Date Sat, 17 July Submited To Dr.R.Goppymesfin mathewosNo ratings yet
- Project XDocument46 pagesProject Xhamza malikNo ratings yet
- Speed Control of DC Motor Using Mobile PhoneDocument4 pagesSpeed Control of DC Motor Using Mobile PhonegowrishankarplNo ratings yet
- Project Outline GP No 14 Sparsh RishabhJain NagaPranavDocument3 pagesProject Outline GP No 14 Sparsh RishabhJain NagaPranavRishabh JainNo ratings yet
- Wi - Fi Control Robot Using Node MCU: January 2018Document5 pagesWi - Fi Control Robot Using Node MCU: January 2018NayaaNo ratings yet
- Agribot: An Agriculture Robot: Vol. 4, Issue 1, January 2015Document3 pagesAgribot: An Agriculture Robot: Vol. 4, Issue 1, January 2015Dreamer JayaNo ratings yet
- Design of Smart Mechanical Grass CutterDocument4 pagesDesign of Smart Mechanical Grass CutterQhai AnimatorNo ratings yet
- Design of Smart Mechanical Grass CutterDocument4 pagesDesign of Smart Mechanical Grass CutterLarweh DanielNo ratings yet
- Design and Development of A Control Unit of An Automated Guided VehicleDocument9 pagesDesign and Development of A Control Unit of An Automated Guided VehicleDanil KhardniNo ratings yet
- Design and Development of Digital PID Controller For DC Motor Drive System Using Embedded Platform For Mobile RobotDocument5 pagesDesign and Development of Digital PID Controller For DC Motor Drive System Using Embedded Platform For Mobile Robotenghasan1969No ratings yet
- V15I5090Document3 pagesV15I5090tariq qureshiNo ratings yet
- Webcam Based Wireless Welding MachineDocument18 pagesWebcam Based Wireless Welding MachineAnuj TripathiNo ratings yet
- JETIR1804103Document6 pagesJETIR1804103Himanshu KumarNo ratings yet
- JournalDocument8 pagesJournalVarun SharmaNo ratings yet
- 412-Report-Induction Motor Protection SysteamDocument97 pages412-Report-Induction Motor Protection Systeamarishmomin44No ratings yet
- Speech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceDocument5 pagesSpeech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceMansi YadavNo ratings yet
- VC 3Document28 pagesVC 3Reethika SNo ratings yet
- Engineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringFrom EverandEngineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringNo ratings yet
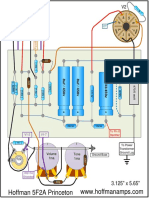
- Hoffman 5F2ADocument4 pagesHoffman 5F2ADakovic AleksandarNo ratings yet
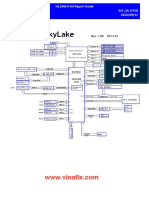
- Asus H110M-K-D3 RGDocument12 pagesAsus H110M-K-D3 RGNguyễn Quang SangNo ratings yet
- Railway Applications - Fixed Installations - Electric Traction Overhead Contact LinesDocument12 pagesRailway Applications - Fixed Installations - Electric Traction Overhead Contact LinesandreadelsoleNo ratings yet
- 100 Relay DevicesDocument26 pages100 Relay DevicesAngel Fel Burlat100% (1)
- BA6286N Reversibel Motor DriverDocument8 pagesBA6286N Reversibel Motor Drivereldel81No ratings yet
- Roland TDA-700 Owner's ManualDocument20 pagesRoland TDA-700 Owner's ManualAnonymous cdQSIU03AQNo ratings yet
- Chapter 2. Basic Sensors and Principles: 2.1 Displacement MeasurementsDocument26 pagesChapter 2. Basic Sensors and Principles: 2.1 Displacement MeasurementsIlavarasan TamizhNo ratings yet
- Pages From FDM (Ducted Split R22) - 6 PDFDocument1 pagePages From FDM (Ducted Split R22) - 6 PDFZiyadawaliNo ratings yet
- 5908999Document86 pages5908999Duc Nguyen HuuNo ratings yet
- Brochure-QES-LCR - GeneratorsDocument16 pagesBrochure-QES-LCR - GeneratorsDaniel IdubeNo ratings yet
- HMC204MS8G 204MS8GE: Gaas Mmic SMT Passive Frequency Doubler, 4 - 8 GHZ InputDocument4 pagesHMC204MS8G 204MS8GE: Gaas Mmic SMT Passive Frequency Doubler, 4 - 8 GHZ InputMike BrdnNo ratings yet
- User'S Manual User'S Manual: 1. ApplicationDocument4 pagesUser'S Manual User'S Manual: 1. ApplicationAhmed TalaatNo ratings yet
- Ka 34063a (Cuk)Document6 pagesKa 34063a (Cuk)sujitNo ratings yet
- Assignment Plug Load Calculation: Submitted By: Amisha 16001006008Document4 pagesAssignment Plug Load Calculation: Submitted By: Amisha 16001006008amisha bansalNo ratings yet
- Plasmadyeing 200320162358Document24 pagesPlasmadyeing 200320162358Ayman SebaeiNo ratings yet
- Measure PWM Motor EfficiencyDocument5 pagesMeasure PWM Motor Efficiencydot11No ratings yet
- RobertsonWilliamJ1959 KBCDocument46 pagesRobertsonWilliamJ1959 KBCVikas RautNo ratings yet
- Sample Chapter ch17 PDFDocument37 pagesSample Chapter ch17 PDFMaitraNo ratings yet
- Electrical and Temperature Correlation To Monitor Fault Condition of Zno Surge ArresterDocument5 pagesElectrical and Temperature Correlation To Monitor Fault Condition of Zno Surge ArresterLucho RufoNo ratings yet
- Super Plasma: C A T N O F 2 2 0 4 0 3Document4 pagesSuper Plasma: C A T N O F 2 2 0 4 0 3David SMNo ratings yet
- Owner's Manual: Bridgeable Power AmplifierDocument64 pagesOwner's Manual: Bridgeable Power AmplifiervanderleySCLNo ratings yet
- VFO StabiliDocument21 pagesVFO StabiliAlexandru Popescu100% (1)
- Tornatech Controller Data Sheet For EFP-WDO PDFDocument13 pagesTornatech Controller Data Sheet For EFP-WDO PDFViệt Đặng XuânNo ratings yet
- Semiconductor Science and Light Emitting DiodesDocument26 pagesSemiconductor Science and Light Emitting Diodeszoex924No ratings yet
- Welding Procedure Specification (WPS) Yes Prequalified X Qualified by Testing or Procedure Qualification Records (PQR) YesDocument2 pagesWelding Procedure Specification (WPS) Yes Prequalified X Qualified by Testing or Procedure Qualification Records (PQR) YessdgshhNo ratings yet
- NRJCAT20023ENDocument64 pagesNRJCAT20023ENdanang nuralamsyahNo ratings yet
- ECE556 Notes CompleteDocument653 pagesECE556 Notes CompleteTaufiku RahmanNo ratings yet
- Chapter 2 Wireless Network PrinciplesDocument79 pagesChapter 2 Wireless Network PrinciplesramuarulmuruganNo ratings yet
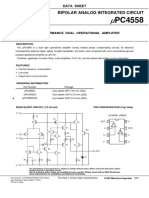
- Upc 4558Document11 pagesUpc 4558alex chapuzNo ratings yet
- UP-IV Pocket CardDocument2 pagesUP-IV Pocket Cardfelix3189100% (1)























































































Download as docx, pdf, or txt
You might also like
- A Technical Seminar Report 443Document31 pagesA Technical Seminar Report 443Gayathri YaddalaNo ratings yet
- Android Phone Controlled Bluetooth Robot: April 2016Document12 pagesAndroid Phone Controlled Bluetooth Robot: April 2016Fakhr Al-TimimiNo ratings yet
- Android Phone Controlled Bluetooth RobotDocument12 pagesAndroid Phone Controlled Bluetooth RobotNazmul Shikder RiyadhNo ratings yet
- Solar Powered Mobile Operated Smart Multifunction Agriculture RobotDocument4 pagesSolar Powered Mobile Operated Smart Multifunction Agriculture RobotVIVA-TECH IJRINo ratings yet
- FireDocument14 pagesFireffire0502No ratings yet
- Irjet V7i61194Document4 pagesIrjet V7i61194Aryan ShrivaNo ratings yet
- Design and Development of Automatic Floor Cleaning Robot Using Mega 328PDocument7 pagesDesign and Development of Automatic Floor Cleaning Robot Using Mega 328Pwww.sangug06No ratings yet
- A On "Capsten Project Planning (CPP) - 22058" Topic - Voice Control Robot CarDocument18 pagesA On "Capsten Project Planning (CPP) - 22058" Topic - Voice Control Robot CarViresh bhoirNo ratings yet
- Segway: School of Electronics EngineeringDocument17 pagesSegway: School of Electronics EngineeringSMNo ratings yet
- Solar Powered Grass Cutter and Pesticide Spreading RobotDocument4 pagesSolar Powered Grass Cutter and Pesticide Spreading RobotNeha SurwaseNo ratings yet
- IRJET V7I5770 With Cover Page v2Document6 pagesIRJET V7I5770 With Cover Page v2pal sarveshNo ratings yet
- PLC Based Waste Management RobotDocument3 pagesPLC Based Waste Management RobotkirubelNo ratings yet
- Bharath Fire Fighting RobotDocument43 pagesBharath Fire Fighting RobotDebojit DasNo ratings yet
- Bluetooth Control RobotDocument20 pagesBluetooth Control RobotSyed arefinNo ratings yet
- FIRE FIGHTING ROBOT (Mini Project)Document21 pagesFIRE FIGHTING ROBOT (Mini Project)Hisham Kunjumuhammed100% (2)
- Chapter 222 LabviewDocument65 pagesChapter 222 LabviewRahul Virmani100% (1)
- Venu PKDocument9 pagesVenu PKVenu Venupk1431No ratings yet
- Wireless 4 Dof Robotic Arm Using Mega 2560-1Document11 pagesWireless 4 Dof Robotic Arm Using Mega 2560-1Kamal HasanNo ratings yet
- Automatic Paint Spraying Machine Using IR Sensor: Abstract: The Primary Aim of The Project Is To Design, DevelopDocument3 pagesAutomatic Paint Spraying Machine Using IR Sensor: Abstract: The Primary Aim of The Project Is To Design, DevelopSANAPA TEJASWININo ratings yet
- Bluetooth Car Using ArduinoDocument9 pagesBluetooth Car Using ArduinoVenu Venupk1431No ratings yet
- Garbage Collection Robot Using Wireless CommunicationsDocument20 pagesGarbage Collection Robot Using Wireless Communicationsvishalpawar050No ratings yet
- Android Mobile Phone Controlled Bluetooth Robot Using 8051 MicrocontrollerDocument4 pagesAndroid Mobile Phone Controlled Bluetooth Robot Using 8051 MicrocontrollerSanzu PebrurisNo ratings yet
- Smart Floor Cleaner Robot Using AndroidDocument5 pagesSmart Floor Cleaner Robot Using AndroidTejas chogale100% (1)
- Solar Based Agriculture TractorDocument23 pagesSolar Based Agriculture TractoryashNo ratings yet
- Agriculture Robotic Vehicles Based PestisideDocument4 pagesAgriculture Robotic Vehicles Based PestisideBiruNo ratings yet
- RF Controlled Solar Panel Based Robotic VehicleDocument6 pagesRF Controlled Solar Panel Based Robotic VehicleMohan Babu ANo ratings yet
- Ijeee-V6i4p102 Seminar 2Document4 pagesIjeee-V6i4p102 Seminar 2tesla231004No ratings yet
- Speed Control of AC Motor: International Journal of Innovative Technology and Exploring Engineering February 2021Document4 pagesSpeed Control of AC Motor: International Journal of Innovative Technology and Exploring Engineering February 2021SABARISH MechanicalNo ratings yet
- Irjet V4i4783 PDFDocument3 pagesIrjet V4i4783 PDFBipin S CNo ratings yet
- Team - CuriosityDocument5 pagesTeam - CuriositySakib RatulNo ratings yet
- Agribot: An Agriculture Robot: Vol. 4, Issue 1, January 2015Document3 pagesAgribot: An Agriculture Robot: Vol. 4, Issue 1, January 2015Mohammad Tahir Khan NiaziNo ratings yet
- Agriculture Robotic Vehicles Based Pesticides SprayerDocument4 pagesAgriculture Robotic Vehicles Based Pesticides Sprayerlikhith dogiparthiNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- Spy Robot Wireless Video Surveillance Using ArduinoDocument5 pagesSpy Robot Wireless Video Surveillance Using ArduinoEyob SintNo ratings yet
- Arduino Based Solar Operated Grass Cutter: Shivani A. Raut, R. J. BhiwaniDocument12 pagesArduino Based Solar Operated Grass Cutter: Shivani A. Raut, R. J. BhiwaniVj Vicky's100% (1)
- Vehicle Monitoring Controlling and Tracking System by Using Android ApplicationDocument7 pagesVehicle Monitoring Controlling and Tracking System by Using Android Applicationنائب إبليسNo ratings yet
- Development of An Obstacle Avoiding Robot: December 2015Document10 pagesDevelopment of An Obstacle Avoiding Robot: December 2015NIDHIN COCHINNo ratings yet
- Android Application Based Speed Control of A MotorDocument2 pagesAndroid Application Based Speed Control of A MotorVarun VadluriNo ratings yet
- سفاريDocument3 pagesسفاريhawrasdqNo ratings yet
- Gripper Robot: Solution Architecture Document ProjectDocument9 pagesGripper Robot: Solution Architecture Document Projectmonika nagarNo ratings yet
- Title: Bluetooth Based Robot: Submition Date Sat, 17 July Submited To Dr.R.GoppyDocument19 pagesTitle: Bluetooth Based Robot: Submition Date Sat, 17 July Submited To Dr.R.Goppymesfin mathewosNo ratings yet
- Project XDocument46 pagesProject Xhamza malikNo ratings yet
- Speed Control of DC Motor Using Mobile PhoneDocument4 pagesSpeed Control of DC Motor Using Mobile PhonegowrishankarplNo ratings yet
- Project Outline GP No 14 Sparsh RishabhJain NagaPranavDocument3 pagesProject Outline GP No 14 Sparsh RishabhJain NagaPranavRishabh JainNo ratings yet
- Wi - Fi Control Robot Using Node MCU: January 2018Document5 pagesWi - Fi Control Robot Using Node MCU: January 2018NayaaNo ratings yet
- Agribot: An Agriculture Robot: Vol. 4, Issue 1, January 2015Document3 pagesAgribot: An Agriculture Robot: Vol. 4, Issue 1, January 2015Dreamer JayaNo ratings yet
- Design of Smart Mechanical Grass CutterDocument4 pagesDesign of Smart Mechanical Grass CutterQhai AnimatorNo ratings yet
- Design of Smart Mechanical Grass CutterDocument4 pagesDesign of Smart Mechanical Grass CutterLarweh DanielNo ratings yet
- Design and Development of A Control Unit of An Automated Guided VehicleDocument9 pagesDesign and Development of A Control Unit of An Automated Guided VehicleDanil KhardniNo ratings yet
- Design and Development of Digital PID Controller For DC Motor Drive System Using Embedded Platform For Mobile RobotDocument5 pagesDesign and Development of Digital PID Controller For DC Motor Drive System Using Embedded Platform For Mobile Robotenghasan1969No ratings yet
- V15I5090Document3 pagesV15I5090tariq qureshiNo ratings yet
- Webcam Based Wireless Welding MachineDocument18 pagesWebcam Based Wireless Welding MachineAnuj TripathiNo ratings yet
- JETIR1804103Document6 pagesJETIR1804103Himanshu KumarNo ratings yet
- JournalDocument8 pagesJournalVarun SharmaNo ratings yet
- 412-Report-Induction Motor Protection SysteamDocument97 pages412-Report-Induction Motor Protection Systeamarishmomin44No ratings yet
- Speech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceDocument5 pagesSpeech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceMansi YadavNo ratings yet
- VC 3Document28 pagesVC 3Reethika SNo ratings yet
- Engineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringFrom EverandEngineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringNo ratings yet
- Hoffman 5F2ADocument4 pagesHoffman 5F2ADakovic AleksandarNo ratings yet
- Asus H110M-K-D3 RGDocument12 pagesAsus H110M-K-D3 RGNguyễn Quang SangNo ratings yet
- Railway Applications - Fixed Installations - Electric Traction Overhead Contact LinesDocument12 pagesRailway Applications - Fixed Installations - Electric Traction Overhead Contact LinesandreadelsoleNo ratings yet
- 100 Relay DevicesDocument26 pages100 Relay DevicesAngel Fel Burlat100% (1)
- BA6286N Reversibel Motor DriverDocument8 pagesBA6286N Reversibel Motor Drivereldel81No ratings yet
- Roland TDA-700 Owner's ManualDocument20 pagesRoland TDA-700 Owner's ManualAnonymous cdQSIU03AQNo ratings yet
- Chapter 2. Basic Sensors and Principles: 2.1 Displacement MeasurementsDocument26 pagesChapter 2. Basic Sensors and Principles: 2.1 Displacement MeasurementsIlavarasan TamizhNo ratings yet
- Pages From FDM (Ducted Split R22) - 6 PDFDocument1 pagePages From FDM (Ducted Split R22) - 6 PDFZiyadawaliNo ratings yet
- 5908999Document86 pages5908999Duc Nguyen HuuNo ratings yet
- Brochure-QES-LCR - GeneratorsDocument16 pagesBrochure-QES-LCR - GeneratorsDaniel IdubeNo ratings yet
- HMC204MS8G 204MS8GE: Gaas Mmic SMT Passive Frequency Doubler, 4 - 8 GHZ InputDocument4 pagesHMC204MS8G 204MS8GE: Gaas Mmic SMT Passive Frequency Doubler, 4 - 8 GHZ InputMike BrdnNo ratings yet
- User'S Manual User'S Manual: 1. ApplicationDocument4 pagesUser'S Manual User'S Manual: 1. ApplicationAhmed TalaatNo ratings yet
- Ka 34063a (Cuk)Document6 pagesKa 34063a (Cuk)sujitNo ratings yet
- Assignment Plug Load Calculation: Submitted By: Amisha 16001006008Document4 pagesAssignment Plug Load Calculation: Submitted By: Amisha 16001006008amisha bansalNo ratings yet
- Plasmadyeing 200320162358Document24 pagesPlasmadyeing 200320162358Ayman SebaeiNo ratings yet
- Measure PWM Motor EfficiencyDocument5 pagesMeasure PWM Motor Efficiencydot11No ratings yet
- RobertsonWilliamJ1959 KBCDocument46 pagesRobertsonWilliamJ1959 KBCVikas RautNo ratings yet
- Sample Chapter ch17 PDFDocument37 pagesSample Chapter ch17 PDFMaitraNo ratings yet
- Electrical and Temperature Correlation To Monitor Fault Condition of Zno Surge ArresterDocument5 pagesElectrical and Temperature Correlation To Monitor Fault Condition of Zno Surge ArresterLucho RufoNo ratings yet
- Super Plasma: C A T N O F 2 2 0 4 0 3Document4 pagesSuper Plasma: C A T N O F 2 2 0 4 0 3David SMNo ratings yet
- Owner's Manual: Bridgeable Power AmplifierDocument64 pagesOwner's Manual: Bridgeable Power AmplifiervanderleySCLNo ratings yet
- VFO StabiliDocument21 pagesVFO StabiliAlexandru Popescu100% (1)
- Tornatech Controller Data Sheet For EFP-WDO PDFDocument13 pagesTornatech Controller Data Sheet For EFP-WDO PDFViệt Đặng XuânNo ratings yet
- Semiconductor Science and Light Emitting DiodesDocument26 pagesSemiconductor Science and Light Emitting Diodeszoex924No ratings yet
- Welding Procedure Specification (WPS) Yes Prequalified X Qualified by Testing or Procedure Qualification Records (PQR) YesDocument2 pagesWelding Procedure Specification (WPS) Yes Prequalified X Qualified by Testing or Procedure Qualification Records (PQR) YessdgshhNo ratings yet
- NRJCAT20023ENDocument64 pagesNRJCAT20023ENdanang nuralamsyahNo ratings yet
- ECE556 Notes CompleteDocument653 pagesECE556 Notes CompleteTaufiku RahmanNo ratings yet
- Chapter 2 Wireless Network PrinciplesDocument79 pagesChapter 2 Wireless Network PrinciplesramuarulmuruganNo ratings yet
- Upc 4558Document11 pagesUpc 4558alex chapuzNo ratings yet
- UP-IV Pocket CardDocument2 pagesUP-IV Pocket Cardfelix3189100% (1)