Download as pdf or txt
You might also like
- Inverter Explanation Cd4047Document7 pagesInverter Explanation Cd4047Sruthi Reddy0% (1)
- Carrier ZONEKIT-2SI Installation and Start-Up InstructionsDocument20 pagesCarrier ZONEKIT-2SI Installation and Start-Up InstructionsJimKNo ratings yet
- A 2 Physics Term 22011 Answer SchemeDocument16 pagesA 2 Physics Term 22011 Answer SchemeannathebitchNo ratings yet
- Fundamentals of Equalizers and Linear EqualizersDocument22 pagesFundamentals of Equalizers and Linear EqualizersThota DeepNo ratings yet
- Using Transistor As A SwitchDocument25 pagesUsing Transistor As A SwitchMahnoor MalikNo ratings yet
- Precision Waveform Generator/Voltage Controlled Oscillator FeaturesDocument12 pagesPrecision Waveform Generator/Voltage Controlled Oscillator FeaturesCharles Tineo0% (1)
- Codigo PDFDocument9 pagesCodigo PDFMarcoBFNo ratings yet
- FT8260 1x AN Rev0.81Document15 pagesFT8260 1x AN Rev0.81Enéas BaroneNo ratings yet
- Icl 8038 DataDocument10 pagesIcl 8038 DataTushar Kanti BeraNo ratings yet
- TL494 TutorialDocument14 pagesTL494 Tutorialwizardgrt1No ratings yet
- Single Ended Active Clamp/Reset PWM: Features DescriptionDocument16 pagesSingle Ended Active Clamp/Reset PWM: Features Descriptioncatsoithahuong84No ratings yet
- Stage 1 Bulk Charge:: Code Foe MPPT Arduino, Current and Voltage Sensor, EtcDocument7 pagesStage 1 Bulk Charge:: Code Foe MPPT Arduino, Current and Voltage Sensor, EtcxuanthamdhqnNo ratings yet
- Arduino 220V Full Wave Controlled Bridge Rectifier - Simple CircuitDocument15 pagesArduino 220V Full Wave Controlled Bridge Rectifier - Simple CircuitbasharfarhanNo ratings yet
- Opto CouplerDocument11 pagesOpto CouplerRey GonzalesNo ratings yet
- An-9006 - IGBT Application Note For Camera StrobeDocument12 pagesAn-9006 - IGBT Application Note For Camera StrobemrgastosoNo ratings yet
- Automatic Street LightDocument13 pagesAutomatic Street LightReymark CrisostomoNo ratings yet
- Badc 2020 01Document5 pagesBadc 2020 01Sk Ahmad FaridNo ratings yet
- AN1895 - L6562 375W Step by StepDocument16 pagesAN1895 - L6562 375W Step by Stepbetodias30No ratings yet
- Commissioning of DAVRDocument70 pagesCommissioning of DAVRPMG Bhuswal Project100% (1)
- AND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteDocument8 pagesAND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteIgor MairinckNo ratings yet
- 555 TimerDocument3 pages555 TimerchandrakanthNo ratings yet
- Bistable MultivibratorDocument28 pagesBistable MultivibratorMansi JaisinghNo ratings yet
- PWM Signal GeneratorsDocument3 pagesPWM Signal GeneratorsjalalhNo ratings yet
- Datasheet Fairchild UC3843Document7 pagesDatasheet Fairchild UC3843Tina JohnsonNo ratings yet
- 8K X 8 Bit Fast Static RAM MCM6264C: MotorolaDocument8 pages8K X 8 Bit Fast Static RAM MCM6264C: Motorolajackiie16No ratings yet
- Cyrustek ES51960 IC (From A Multimeter) - DatasheetDocument23 pagesCyrustek ES51960 IC (From A Multimeter) - DatasheetBluff FlersNo ratings yet
- Voltage To Frequency ConverterDocument7 pagesVoltage To Frequency ConverterRodfer SorianoNo ratings yet
- Multi VibratorDocument6 pagesMulti VibratorAhie CherianNo ratings yet
- Interview QuestionsDocument27 pagesInterview QuestionsRui ChenNo ratings yet
- Antenna Analyzer vk5jst Version 1 Instructions PDFDocument10 pagesAntenna Analyzer vk5jst Version 1 Instructions PDFPisu Miau Pisu MiauNo ratings yet
- Astable Multivibrator Using IC 555 TimerDocument3 pagesAstable Multivibrator Using IC 555 TimermanishaNo ratings yet
- Merlin Gerin Medium VoltageDocument10 pagesMerlin Gerin Medium VoltagekjfenNo ratings yet
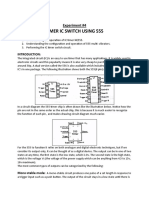
- Timer Ic Switch Using 555: Experiment #4Document7 pagesTimer Ic Switch Using 555: Experiment #4Zeeshan RafiqNo ratings yet
- Ucc3580 4Document20 pagesUcc3580 4vanhuong87No ratings yet
- Uc 3854Document12 pagesUc 3854Leandro CoradiNo ratings yet
- Energy Harvesting EstimatesDocument12 pagesEnergy Harvesting EstimatesShashikiran HPNo ratings yet
- Analog and Digital IC Applications Lab ManualDocument80 pagesAnalog and Digital IC Applications Lab ManualsubbuNo ratings yet
- ISL6255, ISL6255A: Highly Integrated Battery Charger With Automatic Power Source Selector For Notebook Computers FeaturesDocument22 pagesISL6255, ISL6255A: Highly Integrated Battery Charger With Automatic Power Source Selector For Notebook Computers FeaturesEveraldoNo ratings yet
- GBPPR 'Zine - Issue #65Document58 pagesGBPPR 'Zine - Issue #65GBPPRNo ratings yet
- PWM Signal Generators: Testing Status: Mixed. Some Untested, Some SPICE SimulatedDocument15 pagesPWM Signal Generators: Testing Status: Mixed. Some Untested, Some SPICE SimulatedSivareddy MudiyalaNo ratings yet
- Arduino Based Lightning Detector ProjectDocument6 pagesArduino Based Lightning Detector ProjectBenjamin DoverNo ratings yet
- 93c56 DatasheetDocument15 pages93c56 DatasheetsakerhetfreakNo ratings yet
- AV1000 + Assembly + ManualDocument22 pagesAV1000 + Assembly + ManualAnonymous V1NW1Cm3w4100% (3)
- Uc3842 Monitor Power Supply Regulator IcDocument7 pagesUc3842 Monitor Power Supply Regulator IcJoseph Sidhom SnadaNo ratings yet
- Parallel Sequencer Synth: InstructablesDocument18 pagesParallel Sequencer Synth: Instructablesenrique.mella2878No ratings yet
- Full Download Solutions Manual To Accompany Industrial Electronics 9780132064187 PDFDocument31 pagesFull Download Solutions Manual To Accompany Industrial Electronics 9780132064187 PDFdonna.duke560100% (22)
- Microchip TC962 DatasheetDocument13 pagesMicrochip TC962 DatasheetCale McColloughNo ratings yet
- AN904Document8 pagesAN904San EdgardoNo ratings yet
- Low-Power Quad Operational Amplifier: FeaturesDocument21 pagesLow-Power Quad Operational Amplifier: FeaturesAbbas AhmedNo ratings yet
- 100 VOLT 30 AMP H-Bridge PWM Motor Driver/Amplifier: M.S.Kennedy CorpDocument7 pages100 VOLT 30 AMP H-Bridge PWM Motor Driver/Amplifier: M.S.Kennedy CorpDaniel SanchezNo ratings yet
- Solar Battery Charging and Single Phase Supply System: 1) What Is A Solar Cell?Document14 pagesSolar Battery Charging and Single Phase Supply System: 1) What Is A Solar Cell?ayushhjaveriNo ratings yet
- A5800 and A5801: Discontinued ProductDocument13 pagesA5800 and A5801: Discontinued Productitamar_123No ratings yet
- LM2852 Synchronous BuckDocument14 pagesLM2852 Synchronous BuckAndrew CavanaughNo ratings yet
- EECS267B Proj3Document19 pagesEECS267B Proj3hellwellNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Servicio ThinkCentre M73Document256 pagesServicio ThinkCentre M73Diego StylNo ratings yet
- Sec-504 July 2022Document2 pagesSec-504 July 2022Ramu MylaramNo ratings yet
- FBII XL2T Installation ManualDocument98 pagesFBII XL2T Installation ManualIoannis PerperisNo ratings yet
- Tongi 80 MW Gas Turbine Power PlantDocument3 pagesTongi 80 MW Gas Turbine Power PlantMd Maidul HayderNo ratings yet
- Motive 27Tmx: Data SheetDocument2 pagesMotive 27Tmx: Data SheetUlisesGómezNo ratings yet
- Driving Transistors and ThyristorsDocument50 pagesDriving Transistors and Thyristorsapi-3720427100% (2)
- Add Additional Information To Improve DiscoverabilityDocument5 pagesAdd Additional Information To Improve DiscoverabilityDereje Hailu0% (5)
- Manual Servicio EKG Contec ECG1200GDocument28 pagesManual Servicio EKG Contec ECG1200GAngela MendozaNo ratings yet
- Mod 6: Electromagnetism: 6.1 Charged Particles, Conductors & Electric/Magnetic FieldsDocument9 pagesMod 6: Electromagnetism: 6.1 Charged Particles, Conductors & Electric/Magnetic FieldsWarNo ratings yet
- 1) Mastamandu Khola Cost EstimatesDocument16 pages1) Mastamandu Khola Cost EstimatesAbhayaNo ratings yet
- Dell Inspiron 1520 Quanta Fm5 Discrete Rx02 SchematicsDocument52 pagesDell Inspiron 1520 Quanta Fm5 Discrete Rx02 SchematicsLuiz LandtechNo ratings yet
- Quick Start Guide Emerson 404b Infrared Phototach en 5324858Document24 pagesQuick Start Guide Emerson 404b Infrared Phototach en 5324858ANP ENGINEERINGNo ratings yet
- A Survey On FEC Codes For 100G and BeyonDocument15 pagesA Survey On FEC Codes For 100G and BeyonnghtlghtNo ratings yet
- #Operation #DROPtheDRONEDocument11 pages#Operation #DROPtheDRONEtwittersub100% (1)
- Report On Laser AlarmDocument24 pagesReport On Laser AlarmAnkit baghel70% (10)
- Chapitre I-2-: B - Associations de Dipôles Passifs LinéairesDocument2 pagesChapitre I-2-: B - Associations de Dipôles Passifs LinéairesFth Walter100% (1)
- q1vzc La-8941pr10Document45 pagesq1vzc La-8941pr10Sigit Sofyan Putra100% (1)
- Panasonic Sa Pm33eeDocument94 pagesPanasonic Sa Pm33eeDarko BogdanovićNo ratings yet
- Public.1545135650..manual Sivacon 8ps Installing With Li en 2017 04 05Document110 pagesPublic.1545135650..manual Sivacon 8ps Installing With Li en 2017 04 05ThanhNo ratings yet
- SGP15N60 SGW15N60: Fast IGBT in NPT-technologyDocument11 pagesSGP15N60 SGW15N60: Fast IGBT in NPT-technologyMuhammad ZamanNo ratings yet
- Polar 191030 em Emc Mon Technical TrainingDocument62 pagesPolar 191030 em Emc Mon Technical TrainingSankaravel VetrivelNo ratings yet
- Sensor Actuator T211Document22 pagesSensor Actuator T211Noir HamannNo ratings yet
- Efficient Utilisastion of Hybrid Power Plant Using MPPT Technique and Reducing The Voltage Intrupption by Using DstatcomDocument17 pagesEfficient Utilisastion of Hybrid Power Plant Using MPPT Technique and Reducing The Voltage Intrupption by Using DstatcomAnuj TripathiNo ratings yet
- I2 Sover USBDocument6 pagesI2 Sover USBGian Marco BoNo ratings yet
- RC Snubber Design in Synchronous Buck ConverterDocument3 pagesRC Snubber Design in Synchronous Buck ConvertersnvvNo ratings yet
- The Oscilloscope: Parts and Functions: Name: Dynmer P. Recla Section:BSME-2BDocument1 pageThe Oscilloscope: Parts and Functions: Name: Dynmer P. Recla Section:BSME-2BRecla DynmerNo ratings yet
- 1 Cellular Wireless NetworksDocument63 pages1 Cellular Wireless Networksvincent_bermudezNo ratings yet