Download as pdf or txt
You might also like
- Service Manual For The APC Smart UPS 450 700 1000 1400 UPS PDFDocument44 pagesService Manual For The APC Smart UPS 450 700 1000 1400 UPS PDFBubai BhattacharyyaNo ratings yet
- Measuring InstrumentsDocument36 pagesMeasuring InstrumentsGurram Jithin100% (1)
- RestrikingvoltagesgpDocument10 pagesRestrikingvoltagesgpShaik Towheed BanuNo ratings yet
- Lecture 05 The Phasors and Some ExamplesDocument23 pagesLecture 05 The Phasors and Some ExamplesBushra Azmat Qureshi Bushra AzmatNo ratings yet
- A.C. Circiuits NotesDocument38 pagesA.C. Circiuits NotesbenjadiditNo ratings yet
- SLT-B QuestionsDocument6 pagesSLT-B QuestionsrhythmNo ratings yet
- PH1 ProbSet 5Document2 pagesPH1 ProbSet 5akshat shNo ratings yet
- Bahan Kuliah - 6Document19 pagesBahan Kuliah - 6jordi dirgantaraNo ratings yet
- 11 Alternating Current (AC) PDFDocument13 pages11 Alternating Current (AC) PDFRidho KurniaNo ratings yet
- Section 2: Power System Mathematics and Physics, Three-Phase, Power FactorDocument65 pagesSection 2: Power System Mathematics and Physics, Three-Phase, Power FactorKhuram TabassomNo ratings yet
- Restriking Voltage and Recovery VoltageDocument4 pagesRestriking Voltage and Recovery Voltagechandra bhanNo ratings yet
- Formula SheetDocument2 pagesFormula SheetvivakelabuNo ratings yet
- Transmission LinesDocument11 pagesTransmission LinesAnirban Z100% (1)
- Thevenin: AND Equivalent CircuitsDocument11 pagesThevenin: AND Equivalent Circuitssiti love isnainiNo ratings yet
- AC CircuitsDocument48 pagesAC Circuitswocaja8645No ratings yet
- 9 Three Phase InvertersDocument19 pages9 Three Phase InvertersAbdallah LotfyNo ratings yet
- Exp. 4 DECADocument8 pagesExp. 4 DECAaparnasaluja22No ratings yet
- Intro To Ac - StudentDocument33 pagesIntro To Ac - StudentGiovanni Andrew DaltonNo ratings yet
- Circuits in The Frequency DomainDocument4 pagesCircuits in The Frequency DomainBam BrarNo ratings yet
- D D D D : 114 4. Ad-Atoms and Underpotential DepositionDocument4 pagesD D D D : 114 4. Ad-Atoms and Underpotential DepositionRosario Pilar De La Cruz CastellanosNo ratings yet
- Chapter3-Single Phase ACDocument58 pagesChapter3-Single Phase ACBrian LiNo ratings yet
- A Signal Sine Cosine: Sinusoidal CurrentDocument42 pagesA Signal Sine Cosine: Sinusoidal CurrentGumball 8No ratings yet
- Transient and Laplace Transform-1Document36 pagesTransient and Laplace Transform-1Priyanka DeyNo ratings yet
- Electromagnetic InductionDocument25 pagesElectromagnetic InductionManoj WagleNo ratings yet
- Microwave NoteDocument9 pagesMicrowave NoteYogesh Israni ASET, NoidaNo ratings yet
- Friction Factors and Drag Coefficients: t u ρ x T k x qDocument9 pagesFriction Factors and Drag Coefficients: t u ρ x T k x qAbhiyan PaudelNo ratings yet
- ECTE323 Power Engineering 2 - Tutorial 6: T e - Sin) T Sin (L R M V I 2 2 2Document2 pagesECTE323 Power Engineering 2 - Tutorial 6: T e - Sin) T Sin (L R M V I 2 2 2Akhilesh KumarNo ratings yet
- TF2105 08 Rangkaian - ACDocument51 pagesTF2105 08 Rangkaian - ACGilbert SihombingNo ratings yet
- Be Less Than The DC Term (Average Value)Document28 pagesBe Less Than The DC Term (Average Value)Syed AfzalNo ratings yet
- Power Electronics EEE-339: Basic Concepts and RectifiersDocument60 pagesPower Electronics EEE-339: Basic Concepts and RectifiersZAHIDUL SALMANNo ratings yet
- EE213-Unit 3 ThreePhnDocument39 pagesEE213-Unit 3 ThreePhnA MJKNo ratings yet
- Simple and Accurate Formula For Calculating The Conduction Angle of Single Phase RectifierDocument3 pagesSimple and Accurate Formula For Calculating The Conduction Angle of Single Phase RectifierMichele Oconnor0% (1)
- Steady State Analysis of AC Circuits: Chapter-IVDocument15 pagesSteady State Analysis of AC Circuits: Chapter-IVjdabidNo ratings yet
- AC CircuitDocument34 pagesAC Circuitno.1slytherinprincessNo ratings yet
- Travelling Waves 1Document12 pagesTravelling Waves 1Shareef ChampNo ratings yet
- Maxwell'S Equations: V in The Positive X-Direction, GX T BG Af yDocument13 pagesMaxwell'S Equations: V in The Positive X-Direction, GX T BG Af yp_k_soni_iit_physicsNo ratings yet
- ELECTROMAGNETISMDocument26 pagesELECTROMAGNETISMAnand KNo ratings yet
- RLC Laboratory CircuitDocument9 pagesRLC Laboratory CircuitGhiță SfîraNo ratings yet
- Chapter FourDocument19 pagesChapter Fourgeorge manNo ratings yet
- Power Electronics FormulaeDocument66 pagesPower Electronics FormulaePrudhvi AllaNo ratings yet
- Electric Circuits (ELE2114) : Lecture Slides Prepared by Ehsan Jarrar at Sharjah Colleges - 201720Document130 pagesElectric Circuits (ELE2114) : Lecture Slides Prepared by Ehsan Jarrar at Sharjah Colleges - 201720jhon smithNo ratings yet
- Alternating Voltage and CurrentDocument24 pagesAlternating Voltage and CurrentSofwan Juewek100% (1)
- Lecture 1 1Document15 pagesLecture 1 1nehaNo ratings yet
- L19b VVDocument37 pagesL19b VVpallavk369No ratings yet
- Capacitors in DC CircuitsDocument9 pagesCapacitors in DC CircuitsSaravanan ElangovanNo ratings yet
- CHAP3.Arus Bolak BalikDocument35 pagesCHAP3.Arus Bolak BalikFerdinan YudaNo ratings yet
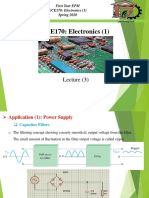
- ECE170: Electronics (1) : LectureDocument40 pagesECE170: Electronics (1) : LectureKhaled MohamedNo ratings yet
- CHAP3.Arus Bolak BalikDocument35 pagesCHAP3.Arus Bolak BalikOmi Luthfia RahmanNo ratings yet
- الكترونكس م7Document40 pagesالكترونكس م7AhmedHamadaNo ratings yet
- Alternating CurrentDocument24 pagesAlternating CurrentAnand KNo ratings yet
- EE200 Chapter4Document10 pagesEE200 Chapter4marwa.moon1981No ratings yet
- Capacitance Measurements of P-N Junctions: Depletion Layer and Diffusion Capacitance ContributionsDocument5 pagesCapacitance Measurements of P-N Junctions: Depletion Layer and Diffusion Capacitance ContributionsOmkar KatkarNo ratings yet
- Chapter 3 Steady State Single Phase AC Circuit Analysis Part 1Document24 pagesChapter 3 Steady State Single Phase AC Circuit Analysis Part 1temesgen adugnaNo ratings yet
- Exer 4Document1 pageExer 4RBNo ratings yet
- Chapter - 6: Ac Fundamentals (Network) : DV DTDocument12 pagesChapter - 6: Ac Fundamentals (Network) : DV DTHassan SayedNo ratings yet
- Alternating CurrentDocument11 pagesAlternating Currentjayaditya soniNo ratings yet
- Single Phase ACDocument133 pagesSingle Phase ACShashidhar Kasthala100% (2)
- Report 9Document9 pagesReport 9Farhan Labib MahinNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Feynman Lectures Simplified 2B: Magnetism & ElectrodynamicsFrom EverandFeynman Lectures Simplified 2B: Magnetism & ElectrodynamicsNo ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- ELTR100 Sec3Document96 pagesELTR100 Sec3ifeniyiNo ratings yet
- MR J3 B SSCNET3 Instruction - ManualDocument271 pagesMR J3 B SSCNET3 Instruction - ManualngoxuannghiaNo ratings yet
- Harmonic Mitigation For AC Variable Frequency Pump DrivesDocument5 pagesHarmonic Mitigation For AC Variable Frequency Pump DrivesOmar Alfredo Del Castillo QuispeNo ratings yet
- 16.Dcs&Lte1800&Wcdma2100 Amplifier 20w 4gDocument2 pages16.Dcs&Lte1800&Wcdma2100 Amplifier 20w 4gAn Truong NguyenNo ratings yet
- Variable High Voltage BJT Regulator User ManualDocument7 pagesVariable High Voltage BJT Regulator User Manualagmnm1962No ratings yet
- Comparison of DAB and LLC DC-DC Converters in High-Step-Down Fixed-Conversion-Ratio (DCX) ApplicationsDocument16 pagesComparison of DAB and LLC DC-DC Converters in High-Step-Down Fixed-Conversion-Ratio (DCX) ApplicationsJAHANGEER AHMADNo ratings yet
- Universal Cable, AXCES 12/20 (24) KV 3x70/16: Product InformationDocument2 pagesUniversal Cable, AXCES 12/20 (24) KV 3x70/16: Product InformationMiso MisoNo ratings yet
- 13 Sandel 3308 FCS Interconnect 90106-10 SHT 20Document1 page13 Sandel 3308 FCS Interconnect 90106-10 SHT 20Carsten KrentscherNo ratings yet
- Attachment B - HAZID WorksheetDocument9 pagesAttachment B - HAZID Worksheetwibowo wibowo100% (1)
- DC Chopper PDFDocument37 pagesDC Chopper PDFmadhubalagangapureNo ratings yet
- Thin Air 102Document6 pagesThin Air 102doanmdatNo ratings yet
- 02 14005 enDocument4 pages02 14005 enJesus Pedroza ContrerasNo ratings yet
- ECE-6323 Deck 01x PDFDocument51 pagesECE-6323 Deck 01x PDFToua MouaNo ratings yet
- Gep (April 2015) Paper 1Document5 pagesGep (April 2015) Paper 1IrfanNo ratings yet
- Sharafu ReportDocument128 pagesSharafu ReportSathish ChandranNo ratings yet
- Technical Specifications For Bird Flight DiverterDocument19 pagesTechnical Specifications For Bird Flight DiverterVidyavathiDavuluriNo ratings yet
- Electrical Drives:: Unit - I Drive CharacteristicsDocument22 pagesElectrical Drives:: Unit - I Drive CharacteristicsJegan8586100% (1)
- ESP REPORT-finalDocument17 pagesESP REPORT-final1322 - Prasad KumbharNo ratings yet
- Victoria University: Lab Report To Investigate The Ferranti Effect Using Artificial Transmission LineDocument20 pagesVictoria University: Lab Report To Investigate The Ferranti Effect Using Artificial Transmission LineAyaz Ahmad100% (1)
- Eaton APS6Document2 pagesEaton APS6oskgraficoNo ratings yet
- Reflex Klystron + TWTDocument11 pagesReflex Klystron + TWTgaurav kelkarNo ratings yet
- High Frequency X-Ray Generator: Installation and Service ManualDocument105 pagesHigh Frequency X-Ray Generator: Installation and Service ManualjeisonNo ratings yet
- Power Waves and Conjugate Matching PDFDocument5 pagesPower Waves and Conjugate Matching PDFСергей АткишкинNo ratings yet
- A Stable Three Phase LCL Filter Based Active Rectifier Without DampingDocument6 pagesA Stable Three Phase LCL Filter Based Active Rectifier Without DampingtorytransNo ratings yet
- Vol. III (B)Document492 pagesVol. III (B)md_rehan_2No ratings yet
- 16 Channel PT100/Current Multiplexer RTM-8: SpecificationsDocument1 page16 Channel PT100/Current Multiplexer RTM-8: SpecificationsBảo BìnhNo ratings yet
- Combined Past PapersDocument149 pagesCombined Past PapersdyrdyrtfyufNo ratings yet
- RTD1509-004 - GXR-SD - Installation Guide2580 - UnlockedDocument51 pagesRTD1509-004 - GXR-SD - Installation Guide2580 - UnlockedMarcus RiveraNo ratings yet