
Bridge Design PDF
Bridge Design PDF
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- TMS 402 - Chapter 9 PDFDocument28 pagesTMS 402 - Chapter 9 PDFAlina Shrestha100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Silo Design ProjectDocument7 pagesSilo Design ProjectDragosPatrascuNo ratings yet
- ASTM Compasse E208 Standart Method Dor Conducting Drop Weight Test To Determinate Nil Ductilly TransitionDocument13 pagesASTM Compasse E208 Standart Method Dor Conducting Drop Weight Test To Determinate Nil Ductilly TransitionAlexandre LaraNo ratings yet
- Fracture MechanicsDocument11 pagesFracture MechanicsDEEPAKNo ratings yet
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational Productyenebeb tarikuNo ratings yet
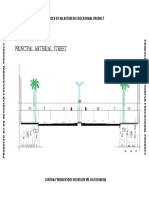
- Road Proposal MAP-ModelDocument1 pageRoad Proposal MAP-Modelyenebeb tarikuNo ratings yet
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational Productyenebeb tarikuNo ratings yet
- Concept Map 1: LegendDocument1 pageConcept Map 1: Legendyenebeb tarikuNo ratings yet
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational Productyenebeb tarikuNo ratings yet
- Road ProposalMAP ModelDocument1 pageRoad ProposalMAP Modelyenebeb tarikuNo ratings yet
- Arcgis 10 1 InstallDocument7 pagesArcgis 10 1 Installyenebeb tarikuNo ratings yet
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational Productyenebeb tarikuNo ratings yet
- Beams (SFD & BMD)Document18 pagesBeams (SFD & BMD)yenebeb tariku100% (1)
- Design of Steel and Timber Structures.Document101 pagesDesign of Steel and Timber Structures.yenebeb tariku89% (18)
- Strategies For Teaching The Accounting Theory Course:: Curriculum, Pedagogy and ResourcesDocument33 pagesStrategies For Teaching The Accounting Theory Course:: Curriculum, Pedagogy and Resourcesyenebeb tarikuNo ratings yet
- Example 1 ': σ σ on faces near water face) on faces away σ water faceDocument4 pagesExample 1 ': σ σ on faces near water face) on faces away σ water faceyenebeb tarikuNo ratings yet
- Accounting Cycle Upto Trial BalanceDocument60 pagesAccounting Cycle Upto Trial Balanceyenebeb tariku100% (1)
- Column Interaction DiagramDocument4 pagesColumn Interaction Diagramavikshit yNo ratings yet
- Name: Amit Sanjay Manthekar. Reg No.: 18BME0597. Course: Material Science - Course Code: MEE1005 Faculty: Muthuchamy ADocument3 pagesName: Amit Sanjay Manthekar. Reg No.: 18BME0597. Course: Material Science - Course Code: MEE1005 Faculty: Muthuchamy AAmit ManthekarNo ratings yet
- f90 For BeginnersDocument630 pagesf90 For BeginnersrajeshnitkkNo ratings yet
- 4 - Anchor - Bolts - Base - Plate - DD1-2 - Module 201BDocument8 pages4 - Anchor - Bolts - Base - Plate - DD1-2 - Module 201Btitir bagchiNo ratings yet
- Sandvik SAF 2304: (Plate and Sheet)Document12 pagesSandvik SAF 2304: (Plate and Sheet)andrepbtNo ratings yet
- Nanoparticles: Building Blocks For NanotechnologyDocument4 pagesNanoparticles: Building Blocks For NanotechnologywayforwardNo ratings yet
- IRC 112 - 2011 (Errata - 1 Published in Feb 2014) PDFDocument2 pagesIRC 112 - 2011 (Errata - 1 Published in Feb 2014) PDFmokshanNo ratings yet
- Civil Model PapersDocument24 pagesCivil Model PapersFarhan SohailNo ratings yet
- A Review of Factors Affecting Toughness in Welded Steels PDFDocument23 pagesA Review of Factors Affecting Toughness in Welded Steels PDFsurendarNo ratings yet
- An Introduction To Mechanics of SolidsDocument98 pagesAn Introduction To Mechanics of SolidsRaushan Jha100% (1)
- Beam DesignDocument11 pagesBeam DesignImranSohailNo ratings yet
- Fatigue 2Document19 pagesFatigue 2sri999No ratings yet
- chpt5 Buckling of Cylindrical Shells PDFDocument43 pageschpt5 Buckling of Cylindrical Shells PDFShivang AgarwalNo ratings yet
- Splice DesignDocument13 pagesSplice Designtitir bagchiNo ratings yet
- Physical Science: San Fabian, PangasinanDocument8 pagesPhysical Science: San Fabian, Pangasinankath neeveNo ratings yet
- Guest Editorial: Carbon NanotubesDocument1 pageGuest Editorial: Carbon Nanotubes454e75376rfufjcbNo ratings yet
- 印度的混凝土梁的试验和仿真计算 PDFDocument14 pages印度的混凝土梁的试验和仿真计算 PDFgufeng0731No ratings yet
- TIMKEN-Bearing Damage AnalysisDocument3 pagesTIMKEN-Bearing Damage AnalysisAnonymous Bdt0OGhNo ratings yet
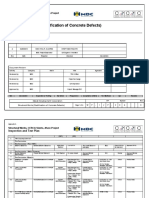
- Structural Works (Rectification of Concrete Defects) : Inspection and Test PlanDocument4 pagesStructural Works (Rectification of Concrete Defects) : Inspection and Test Planace DeclaNo ratings yet
- Research Proposal 1 PDFDocument5 pagesResearch Proposal 1 PDFMunem BushraNo ratings yet
- Phy351 - Tutorial 4Document10 pagesPhy351 - Tutorial 4nurain fasihahNo ratings yet
- Design For Fatigue and Simulation of Glass Fibre Epoxy Composite Automobile Leaf SpringDocument22 pagesDesign For Fatigue and Simulation of Glass Fibre Epoxy Composite Automobile Leaf SpringRahulJNairNo ratings yet
- Materials ScienceDocument17 pagesMaterials ScienceJeromeDelCastilloNo ratings yet
- 10.5 Eccentrically Loaded Columns: Axial Load and BendingDocument20 pages10.5 Eccentrically Loaded Columns: Axial Load and BendingAnthony ManigoNo ratings yet
- The Uses of Metal Matrix Composites in Bicycles: Kerry BissetDocument17 pagesThe Uses of Metal Matrix Composites in Bicycles: Kerry BissetKerry BissetNo ratings yet
- RRB-JE 2019 (CBT-2) : Electronics & Allied EngineeringDocument7 pagesRRB-JE 2019 (CBT-2) : Electronics & Allied EngineeringRamu RamNo ratings yet

















































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- TMS 402 - Chapter 9 PDFDocument28 pagesTMS 402 - Chapter 9 PDFAlina Shrestha100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Silo Design ProjectDocument7 pagesSilo Design ProjectDragosPatrascuNo ratings yet
- ASTM Compasse E208 Standart Method Dor Conducting Drop Weight Test To Determinate Nil Ductilly TransitionDocument13 pagesASTM Compasse E208 Standart Method Dor Conducting Drop Weight Test To Determinate Nil Ductilly TransitionAlexandre LaraNo ratings yet
- Fracture MechanicsDocument11 pagesFracture MechanicsDEEPAKNo ratings yet
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational Productyenebeb tarikuNo ratings yet
- Road Proposal MAP-ModelDocument1 pageRoad Proposal MAP-Modelyenebeb tarikuNo ratings yet
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational Productyenebeb tarikuNo ratings yet
- Concept Map 1: LegendDocument1 pageConcept Map 1: Legendyenebeb tarikuNo ratings yet
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational Productyenebeb tarikuNo ratings yet
- Road ProposalMAP ModelDocument1 pageRoad ProposalMAP Modelyenebeb tarikuNo ratings yet
- Arcgis 10 1 InstallDocument7 pagesArcgis 10 1 Installyenebeb tarikuNo ratings yet
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational Productyenebeb tarikuNo ratings yet
- Beams (SFD & BMD)Document18 pagesBeams (SFD & BMD)yenebeb tariku100% (1)
- Design of Steel and Timber Structures.Document101 pagesDesign of Steel and Timber Structures.yenebeb tariku89% (18)
- Strategies For Teaching The Accounting Theory Course:: Curriculum, Pedagogy and ResourcesDocument33 pagesStrategies For Teaching The Accounting Theory Course:: Curriculum, Pedagogy and Resourcesyenebeb tarikuNo ratings yet
- Example 1 ': σ σ on faces near water face) on faces away σ water faceDocument4 pagesExample 1 ': σ σ on faces near water face) on faces away σ water faceyenebeb tarikuNo ratings yet
- Accounting Cycle Upto Trial BalanceDocument60 pagesAccounting Cycle Upto Trial Balanceyenebeb tariku100% (1)
- Column Interaction DiagramDocument4 pagesColumn Interaction Diagramavikshit yNo ratings yet
- Name: Amit Sanjay Manthekar. Reg No.: 18BME0597. Course: Material Science - Course Code: MEE1005 Faculty: Muthuchamy ADocument3 pagesName: Amit Sanjay Manthekar. Reg No.: 18BME0597. Course: Material Science - Course Code: MEE1005 Faculty: Muthuchamy AAmit ManthekarNo ratings yet
- f90 For BeginnersDocument630 pagesf90 For BeginnersrajeshnitkkNo ratings yet
- 4 - Anchor - Bolts - Base - Plate - DD1-2 - Module 201BDocument8 pages4 - Anchor - Bolts - Base - Plate - DD1-2 - Module 201Btitir bagchiNo ratings yet
- Sandvik SAF 2304: (Plate and Sheet)Document12 pagesSandvik SAF 2304: (Plate and Sheet)andrepbtNo ratings yet
- Nanoparticles: Building Blocks For NanotechnologyDocument4 pagesNanoparticles: Building Blocks For NanotechnologywayforwardNo ratings yet
- IRC 112 - 2011 (Errata - 1 Published in Feb 2014) PDFDocument2 pagesIRC 112 - 2011 (Errata - 1 Published in Feb 2014) PDFmokshanNo ratings yet
- Civil Model PapersDocument24 pagesCivil Model PapersFarhan SohailNo ratings yet
- A Review of Factors Affecting Toughness in Welded Steels PDFDocument23 pagesA Review of Factors Affecting Toughness in Welded Steels PDFsurendarNo ratings yet
- An Introduction To Mechanics of SolidsDocument98 pagesAn Introduction To Mechanics of SolidsRaushan Jha100% (1)
- Beam DesignDocument11 pagesBeam DesignImranSohailNo ratings yet
- Fatigue 2Document19 pagesFatigue 2sri999No ratings yet
- chpt5 Buckling of Cylindrical Shells PDFDocument43 pageschpt5 Buckling of Cylindrical Shells PDFShivang AgarwalNo ratings yet
- Splice DesignDocument13 pagesSplice Designtitir bagchiNo ratings yet
- Physical Science: San Fabian, PangasinanDocument8 pagesPhysical Science: San Fabian, Pangasinankath neeveNo ratings yet
- Guest Editorial: Carbon NanotubesDocument1 pageGuest Editorial: Carbon Nanotubes454e75376rfufjcbNo ratings yet
- 印度的混凝土梁的试验和仿真计算 PDFDocument14 pages印度的混凝土梁的试验和仿真计算 PDFgufeng0731No ratings yet
- TIMKEN-Bearing Damage AnalysisDocument3 pagesTIMKEN-Bearing Damage AnalysisAnonymous Bdt0OGhNo ratings yet
- Structural Works (Rectification of Concrete Defects) : Inspection and Test PlanDocument4 pagesStructural Works (Rectification of Concrete Defects) : Inspection and Test Planace DeclaNo ratings yet
- Research Proposal 1 PDFDocument5 pagesResearch Proposal 1 PDFMunem BushraNo ratings yet
- Phy351 - Tutorial 4Document10 pagesPhy351 - Tutorial 4nurain fasihahNo ratings yet
- Design For Fatigue and Simulation of Glass Fibre Epoxy Composite Automobile Leaf SpringDocument22 pagesDesign For Fatigue and Simulation of Glass Fibre Epoxy Composite Automobile Leaf SpringRahulJNairNo ratings yet
- Materials ScienceDocument17 pagesMaterials ScienceJeromeDelCastilloNo ratings yet
- 10.5 Eccentrically Loaded Columns: Axial Load and BendingDocument20 pages10.5 Eccentrically Loaded Columns: Axial Load and BendingAnthony ManigoNo ratings yet
- The Uses of Metal Matrix Composites in Bicycles: Kerry BissetDocument17 pagesThe Uses of Metal Matrix Composites in Bicycles: Kerry BissetKerry BissetNo ratings yet
- RRB-JE 2019 (CBT-2) : Electronics & Allied EngineeringDocument7 pagesRRB-JE 2019 (CBT-2) : Electronics & Allied EngineeringRamu RamNo ratings yet