Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- General Studies Class 12Document6 pagesGeneral Studies Class 12rpcoolrahul73100% (1)
- MCQ Class 10Document34 pagesMCQ Class 10mondalkakoli83No ratings yet
- Design of Basic ComputerDocument29 pagesDesign of Basic ComputerM DEEPANANo ratings yet
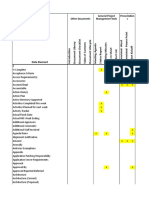
- Project Management Tools Document MatrixDocument35 pagesProject Management Tools Document MatrixtabaquiNo ratings yet
- Worksheet 1Document2 pagesWorksheet 1beshahashenafe20No ratings yet
- Tuning The Lucas Distributor PDFDocument12 pagesTuning The Lucas Distributor PDFgreg titanNo ratings yet
- Sublime VocabularyDocument6 pagesSublime VocabularyHum Nath BaralNo ratings yet
- Report Revenue ServicesDocument10 pagesReport Revenue ServicesaminakalifaNo ratings yet
- Tapo C100 (EU&US) 1.0 DatasheetDocument4 pagesTapo C100 (EU&US) 1.0 DatasheetkelvinNo ratings yet
- Automotive EngineeringDocument5 pagesAutomotive EngineeringJANNo ratings yet
- Itf World Tennis Tour Juniors Withdrawal Form 2020: IPI N Player DetailsDocument1 pageItf World Tennis Tour Juniors Withdrawal Form 2020: IPI N Player Detailsjean luis estNo ratings yet
- Technical Drawing ToolsDocument11 pagesTechnical Drawing Toolsdaphne brown-mundleNo ratings yet
- Performace Task No. 1 PrelimDocument2 pagesPerformace Task No. 1 PrelimAlyanna MagkalasNo ratings yet
- Models Used Must Be Appropriate For Transient Stability AnalysisDocument6 pagesModels Used Must Be Appropriate For Transient Stability AnalysisadauNo ratings yet
- Piping General Arrangement Cooling Tower Water System AreaDocument1 pagePiping General Arrangement Cooling Tower Water System AreaajmainNo ratings yet
- Drilling Rig Components: Crown Block and Water TableDocument8 pagesDrilling Rig Components: Crown Block and Water TableShoq AlahbabNo ratings yet
- MTC 17022021063931Document1 pageMTC 17022021063931Ahmed LepdaNo ratings yet
- Normalisation in MS AccessDocument11 pagesNormalisation in MS AccessFrances VorsterNo ratings yet
- Belzona 1311Document2 pagesBelzona 1311Bobby SatheesanNo ratings yet
- Prof Ed 104 SG 5Document27 pagesProf Ed 104 SG 5smileydaintyNo ratings yet
- Biamp Manual Tesira Hd-1 Oct15-1Document16 pagesBiamp Manual Tesira Hd-1 Oct15-1Rachmat Guntur Dwi PutraNo ratings yet
- Module in ED 101-Child and Adolescent Learners and Learning PrinciplesDocument54 pagesModule in ED 101-Child and Adolescent Learners and Learning PrinciplesCassy Casey100% (3)
- 4.3 - B - 7 - Procedure For OHS Management ProgrammeDocument3 pages4.3 - B - 7 - Procedure For OHS Management ProgrammeSASIKUMAR SNo ratings yet
- Chapter 1 Vocabulary and Study GuideDocument3 pagesChapter 1 Vocabulary and Study GuideArman OmadtoNo ratings yet
- Differential Partitioning of Betacyanins and Betaxanthins Employing Aqueous Two Phase ExtractionDocument8 pagesDifferential Partitioning of Betacyanins and Betaxanthins Employing Aqueous Two Phase ExtractionPaul Jefferson Flores HurtadoNo ratings yet
- Cylinder Head - Diesel Locomotive LucknowDocument25 pagesCylinder Head - Diesel Locomotive LucknowDevyanshu Kumar89% (9)
- AutoBiography of A RiverDocument4 pagesAutoBiography of A Riversukhamoy2571% (21)
- Cargo VentilationDocument23 pagesCargo VentilationCapitan56No ratings yet
- 2 HIE ENG HardwareDocument21 pages2 HIE ENG HardwareWalter Lazo100% (1)
- Demand Forecasting PDFDocument18 pagesDemand Forecasting PDFChhaviGuptaNo ratings yet