Download as pdf or txt
You might also like
- RC EXAM GEAS03 Chemistry Thermo PhysicsDocument4 pagesRC EXAM GEAS03 Chemistry Thermo PhysicsaljamierNo ratings yet
- QUBE-Servo Inverted Pendulum ModelingDocument4 pagesQUBE-Servo Inverted Pendulum ModelingByron Xavier Lima CedilloNo ratings yet
- Servo Valve, Hydraulic - EquationsDocument13 pagesServo Valve, Hydraulic - Equationssharanmech100% (4)
- Chapter 8Document6 pagesChapter 8Sultan_Mehmood_7287No ratings yet
- Malhotra - Analysis of A Cycloid Speed ReducerDocument9 pagesMalhotra - Analysis of A Cycloid Speed ReducerKoen Hermsen100% (3)
- ANSYS ACT API Reference Guide PDFDocument1,964 pagesANSYS ACT API Reference Guide PDFLuis Humberto Martinez PalmethNo ratings yet
- Quest For Space Experiment 1 - Heat Humidity and RadiationDocument22 pagesQuest For Space Experiment 1 - Heat Humidity and Radiationapi-452435135No ratings yet
- MATLAB SIMULATIONS FOR GARNELL's ROLL AUTOPILOTDocument16 pagesMATLAB SIMULATIONS FOR GARNELL's ROLL AUTOPILOTD.ViswanathNo ratings yet
- Laboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Document5 pagesLaboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Virali DoshiNo ratings yet
- 1978 Chen Effect of Viscosity On Coupled Vibrations JSVDocument15 pages1978 Chen Effect of Viscosity On Coupled Vibrations JSVAnirudh SabooNo ratings yet
- Wein Bridge Oscillators PresentationDocument15 pagesWein Bridge Oscillators PresentationHarish KumarNo ratings yet
- Modeling of Inducts KirtleyDocument9 pagesModeling of Inducts KirtleyAnWar MustaFaNo ratings yet
- Acosta Aj 1952Document58 pagesAcosta Aj 1952dodo1986No ratings yet
- Flow of Non Newtonian Fluids Through Eccentric Annuli: Yuejln Luo, "'.M. PedenDocument6 pagesFlow of Non Newtonian Fluids Through Eccentric Annuli: Yuejln Luo, "'.M. PedenqjbsexNo ratings yet
- In Duct AncesDocument10 pagesIn Duct Ancesgrido002No ratings yet
- Simplified Kinematic Analysis of Planetary Gear Trains: J. R. ColbourneDocument10 pagesSimplified Kinematic Analysis of Planetary Gear Trains: J. R. Colbourneaabid ahmedNo ratings yet
- Finite Amplifier Gain and Bandwidth Effects in Switched-Capacitor FiltersDocument4 pagesFinite Amplifier Gain and Bandwidth Effects in Switched-Capacitor Filtersbasemsoufi2No ratings yet
- Nonideal Flow in Reactos PDFDocument26 pagesNonideal Flow in Reactos PDFCarlos Andres Peña GuzmanNo ratings yet
- Journal of Fluid Mechanics Digital Archive Volume 4 Issue 1958 (Doi 10.1017 - S0022112058000318) R. B. Payne - Calculations of Unsteady Viscous Flow Past A Circular Cylinder PDFDocument6 pagesJournal of Fluid Mechanics Digital Archive Volume 4 Issue 1958 (Doi 10.1017 - S0022112058000318) R. B. Payne - Calculations of Unsteady Viscous Flow Past A Circular Cylinder PDFSrinivas JangiliNo ratings yet
- High-Performance Crystal Oscillator Circuits: Theory and ApplicationDocument10 pagesHigh-Performance Crystal Oscillator Circuits: Theory and Applicationsaikat_hazraNo ratings yet
- Impedance, Angular Velocities & Frequencies of Oscillating CurrentsDocument32 pagesImpedance, Angular Velocities & Frequencies of Oscillating CurrentselectrosciNo ratings yet
- Oscillating Disturbance Propagation in Passages of Multi-Stage Hydrogen TurbineDocument4 pagesOscillating Disturbance Propagation in Passages of Multi-Stage Hydrogen TurbineYogi Eka FernandesNo ratings yet
- ME6401-Kinematics of MachineryDocument8 pagesME6401-Kinematics of MachineryKrishnaraj VenugopalNo ratings yet
- Chapter Five 2Document86 pagesChapter Five 2hadiaali100% (1)
- Analysis of Multi-Element Torque ConverterDocument11 pagesAnalysis of Multi-Element Torque ConverterbaharmarineNo ratings yet
- Kuliah 3 2024Document8 pagesKuliah 3 2024Prima DinoNo ratings yet
- Sequential CircuitsDocument11 pagesSequential Circuitskunduru_reddy_3No ratings yet
- Untitled PDFDocument10 pagesUntitled PDFmukeshNo ratings yet
- Simulado - 2 IPhODocument12 pagesSimulado - 2 IPhOleonardo sathlerNo ratings yet
- U N I T 8 B e L T, C H A I N, G e A R S A N D L A W o F G e A R I N G 8 - 1 I N T R o D U C T I o NDocument42 pagesU N I T 8 B e L T, C H A I N, G e A R S A N D L A W o F G e A R I N G 8 - 1 I N T R o D U C T I o Namit_kushwah1No ratings yet
- Blade Element TheoryDocument6 pagesBlade Element TheoryLuz Ángela Rincón GallegoNo ratings yet
- More Compensation: S O L U TI N SDocument11 pagesMore Compensation: S O L U TI N Sdebasishmee5808No ratings yet
- (Received January in Revised Form May: WhitfieldDocument8 pages(Received January in Revised Form May: WhitfieldrezaNo ratings yet
- Lec 10Document21 pagesLec 10eng20mee3170No ratings yet
- Advances in Vector Control Ofac Motor Drives A Review PDFDocument24 pagesAdvances in Vector Control Ofac Motor Drives A Review PDFBook4AllNo ratings yet
- 5542-Article Text PDF-9300-1-10-20130718Document21 pages5542-Article Text PDF-9300-1-10-20130718zeinabNo ratings yet
- Lab # 4 The Photoconductivity of Silicon and The Life-Time of Excess Minority CarriersDocument8 pagesLab # 4 The Photoconductivity of Silicon and The Life-Time of Excess Minority CarriersYong JinNo ratings yet
- Generalized Symmetrical Angle PWM Technique For A.CDocument4 pagesGeneralized Symmetrical Angle PWM Technique For A.Capi-27465568No ratings yet
- Ring CircuitsDocument6 pagesRing CircuitsAndrew ManriqueNo ratings yet
- RGD25 Paper N763 RiabovDocument7 pagesRGD25 Paper N763 RiabovfaisalabidinNo ratings yet
- Models - Mixer.power Law MixerDocument18 pagesModels - Mixer.power Law Mixerbellaarthur7No ratings yet
- Fourth YearDocument8 pagesFourth YearujjwalNo ratings yet
- Electromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following TopicsDocument31 pagesElectromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following Topicsnadir9999No ratings yet
- R. R. Lindberg Et Al - Robust Autoresonant Excitation in The Plasma Beat-Wave AcceleratorDocument4 pagesR. R. Lindberg Et Al - Robust Autoresonant Excitation in The Plasma Beat-Wave AcceleratorVasmazxNo ratings yet
- Short Term Frequency Instability Effects Networks of Coupled OscillatorsDocument7 pagesShort Term Frequency Instability Effects Networks of Coupled OscillatorsKapil MahawarNo ratings yet
- Study On The Vibration Mechanism of The Relay Coil in A Three-Coil WPT SystemDocument10 pagesStudy On The Vibration Mechanism of The Relay Coil in A Three-Coil WPT SystemZhiqiang XuNo ratings yet
- Torque Slip CharacteristicsDocument24 pagesTorque Slip Characteristicsavi013No ratings yet
- Adaptive Force Balancing An Unbalanced Rotor: Jasim Ahmed and Dennis S. Bernstein'Document6 pagesAdaptive Force Balancing An Unbalanced Rotor: Jasim Ahmed and Dennis S. Bernstein'Jessica SandersNo ratings yet
- Mas Sombre Metodo Siacci (Ingles)Document8 pagesMas Sombre Metodo Siacci (Ingles)cristianNo ratings yet
- 01 Unit 7 Important Information Equilibrium All PartsDocument42 pages01 Unit 7 Important Information Equilibrium All PartsRemasa BakraibaNo ratings yet
- H.K. Moffatt - Viscous Eddies Near A Sharp CornerDocument8 pagesH.K. Moffatt - Viscous Eddies Near A Sharp CornerYokdmNo ratings yet
- Polar SolventDocument5 pagesPolar SolventReshma SaxenaNo ratings yet
- Induction Machine PrinciplesDocument4 pagesInduction Machine PrinciplesshahanbashaNo ratings yet
- Elx 311 Chap 7 SlidesDocument23 pagesElx 311 Chap 7 SlidesDaniyar SeytenovNo ratings yet
- DA AnalysisDocument5 pagesDA AnalysisraineymjNo ratings yet
- TOM LabDocument17 pagesTOM LabNitin KumarNo ratings yet
- PoEC 18 RLC Circuits and ResonanceDocument52 pagesPoEC 18 RLC Circuits and ResonanceKrishnaveni Subramani SNo ratings yet
- Chapter 15 Circuit Analysis in The S-Domaun-1Document36 pagesChapter 15 Circuit Analysis in The S-Domaun-1umerNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- (Dunaev) Konstruir Uzlov PDFDocument444 pages(Dunaev) Konstruir Uzlov PDFLuis Humberto Martinez PalmethNo ratings yet
- Design, Fabrication and Experimental Study of A Single Plane Balancing MachineDocument8 pagesDesign, Fabrication and Experimental Study of A Single Plane Balancing MachineLuis Humberto Martinez PalmethNo ratings yet
- Discrete Fourier Transform Gui: 1. Introduction & PurposeDocument3 pagesDiscrete Fourier Transform Gui: 1. Introduction & PurposeLuis Humberto Martinez PalmethNo ratings yet
- Tikz PDFDocument12 pagesTikz PDFLuis Humberto Martinez PalmethNo ratings yet
- Workbench Users GuideDocument348 pagesWorkbench Users GuideLuis Humberto Martinez Palmeth100% (1)
- Experience of The CraneDocument7 pagesExperience of The CraneLuis Humberto Martinez PalmethNo ratings yet
- Tarragona City: A Beautiful City On The Coast of The Mediterranean SEADocument13 pagesTarragona City: A Beautiful City On The Coast of The Mediterranean SEALuis Humberto Martinez Palmeth100% (1)
- Nuclear Magnetic Resonance (NMR)Document2 pagesNuclear Magnetic Resonance (NMR)Luis Humberto Martinez PalmethNo ratings yet
- 1 s2.0 S1006706X10600258 Main PDFDocument6 pages1 s2.0 S1006706X10600258 Main PDFLuis Humberto Martinez PalmethNo ratings yet
- Discrete Fourier Transform Gui: 1. Introduction & PurposeDocument3 pagesDiscrete Fourier Transform Gui: 1. Introduction & PurposeLuis Humberto Martinez PalmethNo ratings yet
- Hi GuidelinesDocument232 pagesHi GuidelinesLuis Humberto Martinez PalmethNo ratings yet
- BST003 - Taps - Lecture Notes PDFDocument131 pagesBST003 - Taps - Lecture Notes PDFKumar MsdNo ratings yet
- Chap3 Laterally Loaded Deep FoundationDocument46 pagesChap3 Laterally Loaded Deep Foundationtadesse habtieNo ratings yet
- Speed of SoundDocument13 pagesSpeed of SoundYasir AliNo ratings yet
- S06 - Turbine LossesDocument116 pagesS06 - Turbine LossesAmore S100% (1)
- FORMAT OF QUESTION PAPER Physics ScienceDocument2 pagesFORMAT OF QUESTION PAPER Physics ScienceHarsha BangeraNo ratings yet
- Unit: Electricity: Chapter: ElectrostaticsDocument81 pagesUnit: Electricity: Chapter: Electrostaticsshivanshsagar2No ratings yet
- Concepts in Structural Steel DesignDocument14 pagesConcepts in Structural Steel DesignMelchizedek EllNo ratings yet
- X.Wang Numericalsimulationofstick SlipbehavioursoftypicalfaultsDocument19 pagesX.Wang Numericalsimulationofstick SlipbehavioursoftypicalfaultsjeovanNo ratings yet
- Five Bar Planar ManipulatorDocument7 pagesFive Bar Planar Manipulatorsalberry14No ratings yet
- Laboratory Report On Specific Heat of SolidsDocument5 pagesLaboratory Report On Specific Heat of SolidsJessie RagandangNo ratings yet
- Design and Fabrication of Fixed Unmanned Aerial VehicleDocument27 pagesDesign and Fabrication of Fixed Unmanned Aerial VehicleYusufNo ratings yet
- Assignment 2Document6 pagesAssignment 2Praveen ChaudharyNo ratings yet
- Buckling of MicropilesDocument4 pagesBuckling of MicropilesAnonymous qTP5oq7g100% (2)
- 06 Hollow SectionDocument30 pages06 Hollow SectionthowchinNo ratings yet
- Briffaut2016 Tunnel Com FibraDocument9 pagesBriffaut2016 Tunnel Com FibralabNo ratings yet
- Class: 9 Subject: Physics Chapter: Motion DPP No # 2: Questions Based On Graphical Representation of MotionDocument3 pagesClass: 9 Subject: Physics Chapter: Motion DPP No # 2: Questions Based On Graphical Representation of Motionshashwat100% (1)
- Low Speed Aerodynamics ASE 320: Lecture 2: Basics of Fluids, Fluid Properties and FieldsDocument17 pagesLow Speed Aerodynamics ASE 320: Lecture 2: Basics of Fluids, Fluid Properties and FieldsBayramNo ratings yet
- Stress Measurement of A Helical Coil Spring Under Static Load Using Strain RosetteDocument7 pagesStress Measurement of A Helical Coil Spring Under Static Load Using Strain RosetteSuresh KumarNo ratings yet
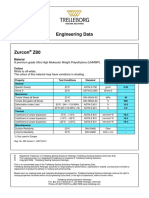
- Zurcon Z80 PDFDocument1 pageZurcon Z80 PDFLuz SmithNo ratings yet
- Qdoc - Tips Theory of Elasticity by Sadhu SinghDocument7 pagesQdoc - Tips Theory of Elasticity by Sadhu Singhking royalNo ratings yet
- Design of Steel Bunker & Silo R1Document22 pagesDesign of Steel Bunker & Silo R1sougata1675% (4)
- 462lecture11 Spacecraft DynamicsDocument37 pages462lecture11 Spacecraft DynamicsmanoNo ratings yet
- ME 352 Mechanics of Materials Lab Semester: 422: Report 1: Tensile TestDocument7 pagesME 352 Mechanics of Materials Lab Semester: 422: Report 1: Tensile TestAyoub MohamedNo ratings yet
- Specific Provisions For Rigid Geo-CellDocument1 pageSpecific Provisions For Rigid Geo-Cellvenkateswara rao PothinaNo ratings yet
- FluidMech - Fluid PropertiesDocument3 pagesFluidMech - Fluid Propertiesocabonita01No ratings yet
- Kinematics of Machines - Rolland Theodore Hinkle, 1953Document245 pagesKinematics of Machines - Rolland Theodore Hinkle, 1953Dodge Worthington100% (2)
- Thermo-Mechanical Axial-Torsion Testing To Assess Workability - Modeling Using Finite Element Method and Experimental ValidationDocument7 pagesThermo-Mechanical Axial-Torsion Testing To Assess Workability - Modeling Using Finite Element Method and Experimental ValidationIsaac SagelNo ratings yet
- Session 2 - Refrigeration ProcessesDocument14 pagesSession 2 - Refrigeration ProcessesSHOBHIT KUMARNo ratings yet