Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Guide D'installation Pour FL10Document2 pagesGuide D'installation Pour FL10ziane abdelkrimNo ratings yet
- Synthesis Essay College AthletesDocument6 pagesSynthesis Essay College Athletesapi-430924181No ratings yet
- DS Tzidc en eDocument36 pagesDS Tzidc en eGregory Alberto Rodríguez PalominoNo ratings yet
- FLASHSCAN Vs CLIP Protocols (Fire Systems)Document2 pagesFLASHSCAN Vs CLIP Protocols (Fire Systems)Gregory Alberto Rodríguez Palomino100% (1)
- Chrono Trigger Nintendo Players GuideDocument136 pagesChrono Trigger Nintendo Players GuideGregory Alberto Rodríguez PalominoNo ratings yet
- FMC - A Comparison of Liquid Petroleum Meters For Custody Transfer MeasurementDocument12 pagesFMC - A Comparison of Liquid Petroleum Meters For Custody Transfer MeasurementGregory Alberto Rodríguez PalominoNo ratings yet
- MapleSim Control Design Getting Started Guide PDFDocument9 pagesMapleSim Control Design Getting Started Guide PDFGregory Alberto Rodríguez PalominoNo ratings yet
- Template PiconfDocument4 pagesTemplate PiconfGregory Alberto Rodríguez PalominoNo ratings yet
- The Art of Tank GaugingDocument26 pagesThe Art of Tank Gaugingnixsol75No ratings yet
- May 3, 1960 Yao Tzu L 2,934,951: Filed Sept. 9, 1952Document3 pagesMay 3, 1960 Yao Tzu L 2,934,951: Filed Sept. 9, 1952Gregory Alberto Rodríguez PalominoNo ratings yet
- Dimensionamiento para Gases (Flowserve)Document17 pagesDimensionamiento para Gases (Flowserve)Gregory Alberto Rodríguez PalominoNo ratings yet
- Programming With Objects VB - MicrosoftDocument133 pagesProgramming With Objects VB - MicrosoftGregory Alberto Rodríguez PalominoNo ratings yet
- Embedded Systems Design Flow Using Altera's FPGA Development Board (DE2-115 T-Pad)Document107 pagesEmbedded Systems Design Flow Using Altera's FPGA Development Board (DE2-115 T-Pad)john smithNo ratings yet
- Wa0007Document3 pagesWa0007SharuNo ratings yet
- Ombudsman Vs MapoyDocument1 pageOmbudsman Vs MapoyHudson CeeNo ratings yet
- INNOVATEXPO - Unlocking Creativity Abstract BookDocument22 pagesINNOVATEXPO - Unlocking Creativity Abstract Bookjoeltomy456No ratings yet
- Assignment ACC106Document13 pagesAssignment ACC106aydolssNo ratings yet
- Apti Question PaperDocument33 pagesApti Question PapermaheshkumarksNo ratings yet
- Yankee Pressure Test TAPPIDocument4 pagesYankee Pressure Test TAPPImgmqroNo ratings yet
- Group No - 8 MCA-507 Mini Project-II SubmissionDocument47 pagesGroup No - 8 MCA-507 Mini Project-II SubmissionThakor KiritNo ratings yet
- Bhagyalaxmi Cotton: Bank Name - Icici Bankaccount No.-655705502528 IFCI CODE-ICIC0006557Document2 pagesBhagyalaxmi Cotton: Bank Name - Icici Bankaccount No.-655705502528 IFCI CODE-ICIC0006557patni psksNo ratings yet
- Sample Offer LettersDocument4 pagesSample Offer LettersAvinash KumarNo ratings yet
- I.T Engg Sem-VIDocument14 pagesI.T Engg Sem-VIMuvin KoshtiNo ratings yet
- Share Capital Materials-1 (Theory and Framework)Document18 pagesShare Capital Materials-1 (Theory and Framework)Joydeep DuttaNo ratings yet
- Sports Economics 2017 1st Edition Berri Solutions ManualDocument8 pagesSports Economics 2017 1st Edition Berri Solutions Manualbrendabrownipnmktbzas100% (10)
- This Article Is About Plant LayoutDocument6 pagesThis Article Is About Plant Layoutsushant_jhawerNo ratings yet
- Transformer Fire ProtectionDocument13 pagesTransformer Fire ProtectionHermi DavidNo ratings yet
- Acts That May BeDocument1 pageActs That May BeEarl Vincent VistaNo ratings yet
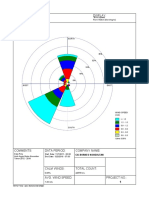
- Wind Rose Plot: DisplayDocument1 pageWind Rose Plot: Displaydhiecha309No ratings yet
- SEM-3 - Business Process Integration (BPI)Document20 pagesSEM-3 - Business Process Integration (BPI)Hee ManNo ratings yet
- En 300 330 V2.1.0 PDFDocument74 pagesEn 300 330 V2.1.0 PDFSosialNo ratings yet
- Chapter 01 CompleteDocument22 pagesChapter 01 CompletePascal EgbendaNo ratings yet
- Tikz TutorialDocument34 pagesTikz Tutorialmz_haq100% (1)
- Manajemen Perioperatif Operasi Arterial Switch PadaDocument12 pagesManajemen Perioperatif Operasi Arterial Switch Padacomiza92No ratings yet
- Trust CasesDocument5 pagesTrust CasesRevina EstradaNo ratings yet
- Strength of MaterialsDocument77 pagesStrength of MaterialsAr Micelle Dacalos Machitar75% (4)
- Rotary Screw Compressors Models XJS/XJF 95 Through 151: E70-510 SPC/JAN 97Document4 pagesRotary Screw Compressors Models XJS/XJF 95 Through 151: E70-510 SPC/JAN 97dfmolinaNo ratings yet
- A1 - Tabangin - FINAL GREENTECH SUMMIT 2023 Disclaimer v2Document39 pagesA1 - Tabangin - FINAL GREENTECH SUMMIT 2023 Disclaimer v2garthraymundo123No ratings yet
- Structure Gad DrawingsDocument56 pagesStructure Gad Drawingsdheeraj sehgalNo ratings yet
- Making Sense of MEMS and ASIC Monolithic Integration: Iain Rutherford - X-FAB MEMS FoundryDocument17 pagesMaking Sense of MEMS and ASIC Monolithic Integration: Iain Rutherford - X-FAB MEMS FoundryEduardo MarquesNo ratings yet