Download as docx, pdf, or txt
You might also like
- Saudi Aramco Engineering Standards-Electrical-CommissioningDocument61 pagesSaudi Aramco Engineering Standards-Electrical-Commissioningsyedsalmanali9193% (15)
- Drone Delivery With Object DetectionDocument53 pagesDrone Delivery With Object Detectionmohan100% (1)
- Selection of Materials For Frame of DroneDocument14 pagesSelection of Materials For Frame of DroneSuresh KumarNo ratings yet
- Design and Development of A Drone For Spraying Pesticides Fertilizers and Disinfectants IJERTV9IS050787 PDFDocument5 pagesDesign and Development of A Drone For Spraying Pesticides Fertilizers and Disinfectants IJERTV9IS050787 PDFPrathmesh RaneNo ratings yet
- CropLife Technical Discussion PaperDocument36 pagesCropLife Technical Discussion PaperSurya Teja Sarma100% (1)
- Project Report On Power Generator Forearms MachineDocument45 pagesProject Report On Power Generator Forearms MachineRais Alam58% (12)
- ISB 4 Cylinder and ISBe 4 and 6 Cylinder Series Engine Familiarization 4021288 PDFDocument31 pagesISB 4 Cylinder and ISBe 4 and 6 Cylinder Series Engine Familiarization 4021288 PDFslipsittinNo ratings yet
- A New Physical TheoryDocument4 pagesA New Physical TheoryJocelyn RegalaNo ratings yet
- Drone 101: A Must-Have Guide For Any Drone Enthusiast: August 2020Document34 pagesDrone 101: A Must-Have Guide For Any Drone Enthusiast: August 2020Hamza AzzamNo ratings yet
- UavDocument19 pagesUavArvind KeesaraNo ratings yet
- Drone and Uav'sDocument22 pagesDrone and Uav'sBHARGAVA REDDYNo ratings yet
- Minor ProjectDocument24 pagesMinor ProjectSanjay BishtNo ratings yet
- Ar DroneDocument62 pagesAr DroneToñoSanchezNo ratings yet
- Unmanned Aerial Vehicles (Complete)Document32 pagesUnmanned Aerial Vehicles (Complete)Raja RahulNo ratings yet
- FYP Report Drone PDFDocument39 pagesFYP Report Drone PDFPranav ReddyNo ratings yet
- ArducopterDocument16 pagesArducopterSummer CoolNo ratings yet
- Drone ReportDocument19 pagesDrone ReportChandan LawrenceNo ratings yet
- DJI Mavic Pro Fly More Combo Drone Black (RM 5599) : Product Description Wherever You GoDocument66 pagesDJI Mavic Pro Fly More Combo Drone Black (RM 5599) : Product Description Wherever You GoAhmad Zuhri0% (1)
- UML Distilled Second Edition A Brief Guide To The Standard Object Modeling LanguageDocument234 pagesUML Distilled Second Edition A Brief Guide To The Standard Object Modeling LanguageMichael Plexousakis100% (1)
- How Do Drones Work and What Is Drone TechnologyDocument16 pagesHow Do Drones Work and What Is Drone TechnologyNamrata PC100% (1)
- Drone TechnologyDocument26 pagesDrone TechnologyAlexNo ratings yet
- A Review On Deep Learning ApplicationsDocument11 pagesA Review On Deep Learning ApplicationsDr.Chitra DhawaleNo ratings yet
- Seminar On GUIDED MISSILEDocument40 pagesSeminar On GUIDED MISSILESandeep Kumar60% (5)
- Drone ProjectDocument22 pagesDrone ProjectPRABHAKAR JAISWALNo ratings yet
- Drones/RPAS Final Report PrivacyDocument378 pagesDrones/RPAS Final Report PrivacyGregoryMcNeal100% (1)
- Manual - Quadcopters Review (Watermarked) PDFDocument28 pagesManual - Quadcopters Review (Watermarked) PDFQuads For Fun100% (3)
- Drone PilotDocument36 pagesDrone PilotLuis Gustavo de CastroNo ratings yet
- Quadcopter (Drone)Document54 pagesQuadcopter (Drone)Er Mohit Jain0% (1)
- A Novel Wind Turbine Condition Monitoring Method Based On Cloud ComputingDocument9 pagesA Novel Wind Turbine Condition Monitoring Method Based On Cloud ComputingAli AlmisbahNo ratings yet
- Project ReportDocument60 pagesProject ReportsreeNo ratings yet
- IoT Based Anti-Poaching System For Trees and Wildlife Monitoring System in Remote AreaDocument7 pagesIoT Based Anti-Poaching System For Trees and Wildlife Monitoring System in Remote AreaIJRASETPublicationsNo ratings yet
- Command and Control of Autonomous Unmanned Vehicles PDFDocument26 pagesCommand and Control of Autonomous Unmanned Vehicles PDFferragNo ratings yet
- Quadcopter SensorsDocument16 pagesQuadcopter SensorsSalahAL-Hakimi100% (1)
- Introduction To Drone TechnologyDocument20 pagesIntroduction To Drone TechnologyGautham SajuNo ratings yet
- Design Your DronesDocument668 pagesDesign Your DronesJasmin Ubiparip100% (1)
- India Drone RegulationsDocument20 pagesIndia Drone RegulationsEsha AgarwalNo ratings yet
- Obstacles Detection2Document10 pagesObstacles Detection2Rahul SawantNo ratings yet
- Spraying Drone With CameraDocument9 pagesSpraying Drone With CameraAin NurfatihahNo ratings yet
- Drone Based Window Cleaner RobotDocument32 pagesDrone Based Window Cleaner RobotKumar SauravNo ratings yet
- Development of Face Recognition Based Smart Door LockDocument5 pagesDevelopment of Face Recognition Based Smart Door LockEditor IjasreNo ratings yet
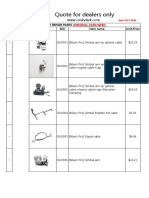
- Quote For Dealers Only: No. Model Picture SKU Item Name Unit - Price Drone Repair PartsDocument66 pagesQuote For Dealers Only: No. Model Picture SKU Item Name Unit - Price Drone Repair Parts许江鹏100% (1)
- Drone NotesDocument6 pagesDrone NotesheypartygirlNo ratings yet
- DRONES UpdatedDocument13 pagesDRONES UpdatedAkarshit PachyalaNo ratings yet
- Design, Analysis of A Multipurpose Survelliance DroneDocument7 pagesDesign, Analysis of A Multipurpose Survelliance DroneManjunath HegdeNo ratings yet
- MJR Project ReviewDocument8 pagesMJR Project ReviewI'm the oneNo ratings yet
- Eye Tracking Based Driver Fatigue Monitoring and Warning - Hardeep Singh Ece - Hardeep@Document30 pagesEye Tracking Based Driver Fatigue Monitoring and Warning - Hardeep Singh Ece - Hardeep@HARDEEP SINGHNo ratings yet
- CG PDFDocument63 pagesCG PDFVarnakeepcreating Varna100% (1)
- Drone Information ModellingDocument9 pagesDrone Information ModellingEricoNo ratings yet
- Proposal For Drone ResearchDocument5 pagesProposal For Drone ResearchRichard Myo ThantNo ratings yet
- Drone Technology ReportDocument29 pagesDrone Technology Reportdhamodhar67% (3)
- Smart TrolleyDocument7 pagesSmart TrolleySanchit SaxenaNo ratings yet
- Solar DroneDocument7 pagesSolar DroneSANTOSH PATILNo ratings yet
- BSIT (Evening) Final Year Projects Proposal Evaluation ReportDocument3 pagesBSIT (Evening) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNo ratings yet
- Laser WeaponsDocument29 pagesLaser WeaponsSai Shubhankar100% (3)
- Finger Print Based Vehicle ImmobilizerDocument3 pagesFinger Print Based Vehicle ImmobilizerdileeppatraNo ratings yet
- Mechanical Model For Quadcopter UAVDocument86 pagesMechanical Model For Quadcopter UAVmatteoragni100% (2)
- Drone Report SampleDocument29 pagesDrone Report SampleBhuvaneshwaran MSNo ratings yet
- Final Year Project Titles 2017-2018Document24 pagesFinal Year Project Titles 2017-2018Igeeks Technologies,Bangalore0% (1)
- Solar Wind & Hydro Energy Drone Inspection PresentationDocument32 pagesSolar Wind & Hydro Energy Drone Inspection PresentationKashif Zaheer Alvi100% (1)
- Eye PhoneDocument25 pagesEye Phoneobaid khanNo ratings yet
- FinalDocument9 pagesFinal10-KINI RUTIKNo ratings yet
- Wireless Bomb Defusing Robot With Camera InterfacingDocument4 pagesWireless Bomb Defusing Robot With Camera InterfacingijsretNo ratings yet
- Multi Rotor DronesDocument8 pagesMulti Rotor Dronesdhaneesh22No ratings yet
- Happy Birthday: Wishing You A VeryDocument2 pagesHappy Birthday: Wishing You A VeryRais AlamNo ratings yet
- Preface: MURTAZA HASAN (1501060044)Document1 pagePreface: MURTAZA HASAN (1501060044)Rais AlamNo ratings yet
- Pre School: Summer Sports Camp - 2019Document1 pagePre School: Summer Sports Camp - 2019Rais AlamNo ratings yet
- A Winter Training: Project Guide: Submitted byDocument2 pagesA Winter Training: Project Guide: Submitted byRais AlamNo ratings yet
- Medical Shop System': Bachelor of Computer ApplicationDocument5 pagesMedical Shop System': Bachelor of Computer ApplicationRais AlamNo ratings yet
- First PageDocument5 pagesFirst PageRais AlamNo ratings yet
- Chapter IDocument11 pagesChapter IRais AlamNo ratings yet
- A Summer Training ReportDocument6 pagesA Summer Training ReportRais AlamNo ratings yet
- Ds0 Th0 Ch0 Uxj Eqjknkckn D (Kk&8 DH MRRH - KZ NK Kvksa DH LWPH L &2018&19Document2 pagesDs0 Th0 Ch0 Uxj Eqjknkckn D (Kk&8 DH MRRH - KZ NK Kvksa DH LWPH L &2018&19Rais AlamNo ratings yet
- B.tech 1Document49 pagesB.tech 1Rais AlamNo ratings yet
- Globalization and EducationDocument10 pagesGlobalization and EducationRais AlamNo ratings yet
- Woman and Political Participation: Emerging Patterns: esri2011/ISSN 0975-7635Document15 pagesWoman and Political Participation: Emerging Patterns: esri2011/ISSN 0975-7635Rais AlamNo ratings yet
- REPORTDocument86 pagesREPORTRais AlamNo ratings yet
- Analysis of Compressive Strength of M-25 Grade Concrete Using Fly Ash As Partial Replacement of CementDocument49 pagesAnalysis of Compressive Strength of M-25 Grade Concrete Using Fly Ash As Partial Replacement of CementRais AlamNo ratings yet
- Ar ExportsDocument1 pageAr ExportsRais AlamNo ratings yet
- Multilayer Car Parking System: A Project Report ONDocument1 pageMultilayer Car Parking System: A Project Report ONRais AlamNo ratings yet
- Question Paper PDFDocument484 pagesQuestion Paper PDFRais AlamNo ratings yet
- Question Paper PDFDocument484 pagesQuestion Paper PDFRais AlamNo ratings yet
- PampletDocument2 pagesPampletRais AlamNo ratings yet
- Training and Development in C.L. Gupta Export: A Project ReportDocument5 pagesTraining and Development in C.L. Gupta Export: A Project ReportRais AlamNo ratings yet
- Iftm University, Moradabad: Kumari KanchanDocument21 pagesIftm University, Moradabad: Kumari KanchanRais AlamNo ratings yet
- ContentsDocument1 pageContentsRais AlamNo ratings yet
- M.Ed. Topic ListDocument2 pagesM.Ed. Topic ListRais AlamNo ratings yet
- HoliDocument2 pagesHoliRais AlamNo ratings yet
- 2013ee0622 - Sirim QasDocument15 pages2013ee0622 - Sirim QasArun dasNo ratings yet
- Caesar II User Manual PDF - Google XXXDocument2 pagesCaesar II User Manual PDF - Google XXXjasonwu1115100% (1)
- Cell Biology Mixed Question QuizDocument17 pagesCell Biology Mixed Question QuizMariamNo ratings yet
- Labels Independent Heating BMW E60 Sedan 47750Document2 pagesLabels Independent Heating BMW E60 Sedan 47750Kifah ZaidanNo ratings yet
- GSG DiffuserStyleBarrelPump E00612 PDFDocument5 pagesGSG DiffuserStyleBarrelPump E00612 PDFsukrisnoNo ratings yet
- Aqua4Trans FM NewDocument6 pagesAqua4Trans FM NewraviNo ratings yet
- Materials Today: Proceedings: Pavushetti Abhilash, Raghavan Nanda Kumar, Raparthi Praveen KumarDocument5 pagesMaterials Today: Proceedings: Pavushetti Abhilash, Raghavan Nanda Kumar, Raparthi Praveen Kumarmuntasir antuNo ratings yet
- Plugin Erect BaziDocument15 pagesPlugin Erect BazirendaoNo ratings yet
- RASCO CatalogDocument17 pagesRASCO Catalogdesters1120No ratings yet
- Safety Light Curtains: EOS4 903 XDocument3 pagesSafety Light Curtains: EOS4 903 XRogério FradiganoNo ratings yet
- 41011719Document6 pages41011719Dheeraj ShuklaNo ratings yet
- Type 437: Safety Relief ValvesDocument10 pagesType 437: Safety Relief ValvesJose Luis Palacios BautistaNo ratings yet
- Lecture 4Document63 pagesLecture 4InfragNo ratings yet
- Australian Reduced Model 14 Generator System PSSE Study ReportDocument37 pagesAustralian Reduced Model 14 Generator System PSSE Study ReportN R SHEKARNo ratings yet
- Codigos de FallaDocument5 pagesCodigos de FallaLuis Angel Condori MoralesNo ratings yet
- Kant's Views On Space and Time - Notes (Stanford Encyclopedia of Philosophy)Document4 pagesKant's Views On Space and Time - Notes (Stanford Encyclopedia of Philosophy)yurislvaNo ratings yet
- Basic Measurements in EpidemiologyDocument58 pagesBasic Measurements in EpidemiologyRida AwwalNo ratings yet
- Real-Time Construction Project ProgressDocument217 pagesReal-Time Construction Project Progressbala pandiyanNo ratings yet
- ASTM E 1316 Terminology PDFDocument38 pagesASTM E 1316 Terminology PDFaliextomaNo ratings yet
- Wire Less Stepper Motor Controll Using MicrocontrollerDocument51 pagesWire Less Stepper Motor Controll Using MicrocontrollerAnil ReddyNo ratings yet
- Bridge Barriers in Relation To The Crash Testing Standards: Wasim QADIRDocument8 pagesBridge Barriers in Relation To The Crash Testing Standards: Wasim QADIR정주호No ratings yet
- Stock Price Prediction Using Long Short Term Memory: International Research Journal of Engineering and Technology (IRJET)Document9 pagesStock Price Prediction Using Long Short Term Memory: International Research Journal of Engineering and Technology (IRJET)Amit SheoranNo ratings yet
- Meth ValDocument140 pagesMeth ValRamboNo ratings yet
- VNT Brochure NewDocument5 pagesVNT Brochure Newda vin ciNo ratings yet
- The Impact of Customer Relationship Marketing Tactics On Customer LoyaltyDocument43 pagesThe Impact of Customer Relationship Marketing Tactics On Customer LoyaltysteffyalbertsNo ratings yet
- Fenwalnet 6000 Configuration Software (FCS 6000) : User's GuideDocument132 pagesFenwalnet 6000 Configuration Software (FCS 6000) : User's GuideJose GutierrezNo ratings yet
- Math JoDocument56 pagesMath JojosephNo ratings yet