Download as docx, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elna Service Manuals PDFDocument85 pagesElna Service Manuals PDFKen Mehl100% (1)
- I-ACT 2017 Yolanda Muliana (OK) Rev 6Document27 pagesI-ACT 2017 Yolanda Muliana (OK) Rev 6Yolanda MulianaNo ratings yet
- Analog To Digital ConversionDocument18 pagesAnalog To Digital ConversionTony GuevarraNo ratings yet
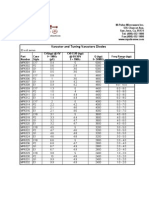
- TLP750 Datasheet en 20190610Document7 pagesTLP750 Datasheet en 20190610Gabriel EscamillaNo ratings yet
- CH 1Document171 pagesCH 1temamNo ratings yet
- QM1 Problem Set 1 Solutions - Mike SaelimDocument5 pagesQM1 Problem Set 1 Solutions - Mike SaelimryzesyaaNo ratings yet
- Inovance Sv820 Servo Manual English 20-4-20Document335 pagesInovance Sv820 Servo Manual English 20-4-20Ricardo LopezNo ratings yet
- GTP - 5 Mva - 66 - 6.6 KV - Octc - 18.05.19Document1 pageGTP - 5 Mva - 66 - 6.6 KV - Octc - 18.05.19Electrical RadicalNo ratings yet
- Diagrama Pioneer Instalación ElectricaDocument124 pagesDiagrama Pioneer Instalación ElectricaJose AcostaNo ratings yet
- Koden Introduces New Kat-100 Class A Ais TransceiverDocument2 pagesKoden Introduces New Kat-100 Class A Ais TransceiverAhmedNo ratings yet
- Freedom ToasterDocument4 pagesFreedom ToasterJerrin FrancisNo ratings yet
- Variable Speed DriveDocument16 pagesVariable Speed DriveAnonymous M0tjyWNo ratings yet
- Transistor PN2222Document6 pagesTransistor PN2222menasoftNo ratings yet
- VaractorsDocument1 pageVaractorsMd. R IslamNo ratings yet
- UPSRTC CatalogueDocument268 pagesUPSRTC Cataloguesunnysan8No ratings yet
- Podcasting & Vodcasting: University of MissouriDocument14 pagesPodcasting & Vodcasting: University of Missouriratha_raginiNo ratings yet
- FMM - Computer Applications in Financial Market Marking SchemeDocument7 pagesFMM - Computer Applications in Financial Market Marking SchemenarayannppNo ratings yet
- Mason's Gain FormulaDocument4 pagesMason's Gain Formulailg1No ratings yet
- 4R1 FN08 XFC01Document2,684 pages4R1 FN08 XFC01jorge ajata valerianoNo ratings yet
- Important MCQ - Magnetism and ElectromagnetismDocument12 pagesImportant MCQ - Magnetism and ElectromagnetismNaman ChauhanNo ratings yet
- HP Laserjet 3015 3020 3030 Aio MFP - Parts and DiagramDocument51 pagesHP Laserjet 3015 3020 3030 Aio MFP - Parts and DiagramEdon SurfistNo ratings yet
- DSP01Document14 pagesDSP01Shaista NazNo ratings yet
- Problems For Chapter 3Document3 pagesProblems For Chapter 3qasimrazam89No ratings yet
- Circuit Analysis I With Matlab Computing and Simulink Simpower Systems Modeling by Steven T. Karris PDFDocument618 pagesCircuit Analysis I With Matlab Computing and Simulink Simpower Systems Modeling by Steven T. Karris PDFChristian Paul LugmañaNo ratings yet
- BSNL (Training Report)Document55 pagesBSNL (Training Report)Aditya PrasadNo ratings yet
- Target Handover 12 Feb 2015 2Document3 pagesTarget Handover 12 Feb 2015 2Shady AhdyNo ratings yet
- 1830PSS R36 QuickReferenceGuide 8DG60888JAAADocument66 pages1830PSS R36 QuickReferenceGuide 8DG60888JAAAFelippe CanatoNo ratings yet
- Android ToCDocument3 pagesAndroid ToCAravind BairiNo ratings yet
- Fresenius Injectomat 2000 - Service ManualDocument82 pagesFresenius Injectomat 2000 - Service ManualSwami MeeraNo ratings yet
- Anixter Thermocouple and RTD Wire Wire Wisdom enDocument2 pagesAnixter Thermocouple and RTD Wire Wire Wisdom enFelipe GustavoNo ratings yet