Download as pdf or txt
You might also like
- Grade 7Document6 pagesGrade 7Alecia R. CastilloNo ratings yet
- Goh Et Al-2017-Journal of Computational ChemistryDocument17 pagesGoh Et Al-2017-Journal of Computational ChemistryiplabaNo ratings yet
- Fey: Visualization of Virtual MachinesDocument7 pagesFey: Visualization of Virtual MachinesJohnNo ratings yet
- Computers & Industrial Engineering 124 (2018) 411-421Document11 pagesComputers & Industrial Engineering 124 (2018) 411-421Heni AgustianiNo ratings yet
- PRXQuantum 2 010328Document32 pagesPRXQuantum 2 010328Huyen DoNo ratings yet
- Optimization AlgorithmDocument14 pagesOptimization AlgorithmRACHANA GUPTANo ratings yet
- Learning To Superoptimize Real-World ProgramsDocument10 pagesLearning To Superoptimize Real-World Programsadam smithNo ratings yet
- Learning To Learn, From Transfer Learning To Domain AdaptationDocument8 pagesLearning To Learn, From Transfer Learning To Domain Adaptationarun_kejariwalNo ratings yet
- Query Dependent PromptDocument55 pagesQuery Dependent PromptSanjib GangulyNo ratings yet
- Orbit Forecasting ModelDocument6 pagesOrbit Forecasting ModelGetro LucasNo ratings yet
- Automated Proof Synthesis For Propositional Logic With Deep Neural NetworksDocument25 pagesAutomated Proof Synthesis For Propositional Logic With Deep Neural NetworksSmail SmartNo ratings yet
- Large Language Model For ScienceDocument73 pagesLarge Language Model For ScienceYufei AmazonNo ratings yet
- Algorithms For Hyper-Parameter OptimizationDocument10 pagesAlgorithms For Hyper-Parameter OptimizationAmine LahlalNo ratings yet
- Assessing Naive Bayes and Support Vector Machine Performance in Sentiment Classification On A Big Data PlatformDocument7 pagesAssessing Naive Bayes and Support Vector Machine Performance in Sentiment Classification On A Big Data PlatformIAES IJAINo ratings yet
- The RatioLog Project - Rational Extensions of LogiDocument7 pagesThe RatioLog Project - Rational Extensions of Logi2K20A502shailendrakumarNo ratings yet
- Parametrized Quantum Policies For Reinforcement LearningDocument33 pagesParametrized Quantum Policies For Reinforcement LearningLakshika RathiNo ratings yet
- RL Prompt-OptimizationDocument48 pagesRL Prompt-Optimizationsayedwilliams99No ratings yet
- HyperTree Proof Search For Neural Theorem ProvingDocument30 pagesHyperTree Proof Search For Neural Theorem Proving刘行No ratings yet
- 19 Query Rewriting For RagDocument13 pages19 Query Rewriting For RagPraveen KumarNo ratings yet
- Building Knowledge Through Families of ExperimentsDocument18 pagesBuilding Knowledge Through Families of ExperimentsSeverin BenzNo ratings yet
- An Introduction To Quantum Machine Learning: A A, B A, BDocument19 pagesAn Introduction To Quantum Machine Learning: A A, B A, BPRAGYA CHANDAKNo ratings yet
- Neko: A Library For Exploring Neuromorphic Learning Rules: Zixuan Zhao Nathan Wycoff Neil GettyDocument5 pagesNeko: A Library For Exploring Neuromorphic Learning Rules: Zixuan Zhao Nathan Wycoff Neil Gettycarolstarr78No ratings yet
- Deep Learning Computers TodayDocument13 pagesDeep Learning Computers TodaybobNo ratings yet
- Cis CPD LSCDocument2 pagesCis CPD LSCLahouari GhoutiNo ratings yet
- Active Learning For Hyperspectral Image Classification A Comparative ReviewDocument23 pagesActive Learning For Hyperspectral Image Classification A Comparative ReviewAdduru U G SankararaoNo ratings yet
- Ga AnnDocument74 pagesGa AnnTayseer AtiaNo ratings yet
- Forml: Research in Advanced Theorem-Proving TechniquesDocument16 pagesForml: Research in Advanced Theorem-Proving TechniquesRahul SinghNo ratings yet
- How To Transfer Algorithmic Reasoning Knowledge To Learn New Algorithms?Document21 pagesHow To Transfer Algorithmic Reasoning Knowledge To Learn New Algorithms?timsmith1081574No ratings yet
- Missing Child 3Document2 pagesMissing Child 3mohsin asmaNo ratings yet
- One Billion Word Benchmark For Measuring Progress in Statistical Language ModelingDocument6 pagesOne Billion Word Benchmark For Measuring Progress in Statistical Language ModelingWalterHuNo ratings yet
- Auto-Pytorch Tabular: Multi-Fidelity Metalearning For Efficient and Robust AutodlDocument15 pagesAuto-Pytorch Tabular: Multi-Fidelity Metalearning For Efficient and Robust AutodlMathias RosasNo ratings yet
- A Comparative Study of Deep LearningDocument6 pagesA Comparative Study of Deep LearningGhifaripnNo ratings yet
- Supervision Via Competition: Robot Adversaries For Learning TasksDocument8 pagesSupervision Via Competition: Robot Adversaries For Learning TasksrobotdazeroNo ratings yet
- A Case For Access Points by Calamitat SanchisDocument4 pagesA Case For Access Points by Calamitat Sanchisalvarito2009No ratings yet
- Paper 02Document4 pagesPaper 02HarukiNo ratings yet
- Comparing Vacuum Tubes and Write-Ahead Logging Using Inca: GordisDocument7 pagesComparing Vacuum Tubes and Write-Ahead Logging Using Inca: GordisLKNo ratings yet
- p150 ShafferDocument5 pagesp150 ShafferjateensoniNo ratings yet
- Skeleton-to-Response: Dialogue Generation Guided by Retrieval MemoryDocument8 pagesSkeleton-to-Response: Dialogue Generation Guided by Retrieval MemoryArefin HasibNo ratings yet
- Scimakelatex 21943 Bna+Bla Rmin+gborDocument7 pagesScimakelatex 21943 Bna+Bla Rmin+gborJuhász TamásNo ratings yet
- Codesearchnet Challenge Evaluating The State of Semantic Code SearchDocument6 pagesCodesearchnet Challenge Evaluating The State of Semantic Code SearchRayverNo ratings yet
- Coq MLDocument15 pagesCoq MLSmail SmartNo ratings yet
- Informed_Machine_Learning__A_Taxonomy_and_Survey_of_Integrating_Prior_Knowledge_into_Learning_SystemsDocument20 pagesInformed_Machine_Learning__A_Taxonomy_and_Survey_of_Integrating_Prior_Knowledge_into_Learning_Systemskaigamer00852No ratings yet
- Bench MarkingDocument12 pagesBench Markingamgad monirNo ratings yet
- Developing Corpus-Based Translation Methods Between Informal and Formal Mathematics: Project DescriptionDocument5 pagesDeveloping Corpus-Based Translation Methods Between Informal and Formal Mathematics: Project Descriptionsaman kasmaieeNo ratings yet
- Presentify Automated Presentation Slide GenerationDocument7 pagesPresentify Automated Presentation Slide GenerationinvestigationlabsblaktronicsNo ratings yet
- Deep Meta-Learning Learning To Learn in The Concept SpaceDocument10 pagesDeep Meta-Learning Learning To Learn in The Concept SpacechenmantunNo ratings yet
- Differentiable Inductive Logic Programming in High-Dimensional Space2208.06652Document8 pagesDifferentiable Inductive Logic Programming in High-Dimensional Space2208.06652骥ZhangNo ratings yet
- Scimakelatex 16840 and Another OneDocument8 pagesScimakelatex 16840 and Another Onemdp anonNo ratings yet
- Informed Machine Learning - A Taxonomy and Survey of Integrating Prior Knowledge Into Learning SystemsDocument20 pagesInformed Machine Learning - A Taxonomy and Survey of Integrating Prior Knowledge Into Learning SystemsLucas FiordelisiNo ratings yet
- Deepseekmath: Pushing The Limits of Mathematical Reasoning in Open Language ModelsDocument30 pagesDeepseekmath: Pushing The Limits of Mathematical Reasoning in Open Language Modelsannetteballard002No ratings yet
- SAPENet: Self-Attention Based Prototype Enhancement Network For Few-Shot LearningDocument11 pagesSAPENet: Self-Attention Based Prototype Enhancement Network For Few-Shot Learningnatra2k2No ratings yet
- Deconstructing Active Networks: KolenDocument7 pagesDeconstructing Active Networks: Kolenehsan_sa405No ratings yet
- NEC-NLE-2406-131-ISS-2-PhD Intern or Visiting Researcher On Geometric Deep Learning For Science (2024-06-131-ISS)Document1 pageNEC-NLE-2406-131-ISS-2-PhD Intern or Visiting Researcher On Geometric Deep Learning For Science (2024-06-131-ISS)sumaiya dabeerNo ratings yet
- Scimakelatex 23918 NoneDocument6 pagesScimakelatex 23918 None51pNo ratings yet
- Scimakelatex 26002 None PDFDocument6 pagesScimakelatex 26002 None PDFtulsyNo ratings yet
- Teaching LLMDocument24 pagesTeaching LLMrndNo ratings yet
- An Ergodic Measure For Active Learning From EquilibriumDocument15 pagesAn Ergodic Measure For Active Learning From EquilibriumJoan QuraNo ratings yet
- Hyperparameter Tuning For Deep Reinforcement Learning ApplicationsDocument12 pagesHyperparameter Tuning For Deep Reinforcement Learning Applicationsnotsure.g6rp1No ratings yet
- Siamese Neural Networks For One-Shot Image RecognitionDocument8 pagesSiamese Neural Networks For One-Shot Image Recognitionabyasingh04No ratings yet
- Perspectives: Scientific Machine Learning BenchmarksDocument8 pagesPerspectives: Scientific Machine Learning BenchmarksprfdjkdkvcssdNo ratings yet
- Data Science Solutions with Python: Fast and Scalable Models Using Keras, PySpark MLlib, H2O, XGBoost, and Scikit-LearnFrom EverandData Science Solutions with Python: Fast and Scalable Models Using Keras, PySpark MLlib, H2O, XGBoost, and Scikit-LearnNo ratings yet
- Cubo OctahedroDocument1 pageCubo OctahedroPablo Sánchez MadrigalNo ratings yet
- Keeping Things Open: S Eminaire Poincar eDocument17 pagesKeeping Things Open: S Eminaire Poincar ePablo Sánchez MadrigalNo ratings yet
- Flextangles Template BABBLE DABBLE DODocument1 pageFlextangles Template BABBLE DABBLE DOAnonymous rsL4gLNo ratings yet
- Uñas de Los PiesDocument11 pagesUñas de Los PiesPablo Sánchez MadrigalNo ratings yet
- Internet Addiction, Phubbing, PDFDocument17 pagesInternet Addiction, Phubbing, PDFmahmoudNo ratings yet
- Changes of MatterDocument3 pagesChanges of MatterYlreveb Agali YadnutNo ratings yet
- Informative SpeechDocument3 pagesInformative SpeechMaryam KhanzaiNo ratings yet
- Ielts IdpDocument2 pagesIelts IdpalbertNo ratings yet
- Educational Research Review: Tina Hascher, Jennifer WaberDocument25 pagesEducational Research Review: Tina Hascher, Jennifer Wabercarter TLCNo ratings yet
- Chapter Seven Report Preparation and Presentation: by Mehari HDocument9 pagesChapter Seven Report Preparation and Presentation: by Mehari HgereNo ratings yet
- English 5 First Periodical Test 2022 2023 GILGEM SALES FinalDocument10 pagesEnglish 5 First Periodical Test 2022 2023 GILGEM SALES FinalJannahNo ratings yet
- DAILY LESSON LOG TemplateDocument3 pagesDAILY LESSON LOG TemplateTeresa Marie Yap CorderoNo ratings yet
- Case Study No. 5Document11 pagesCase Study No. 5Julie Anne CristalesNo ratings yet
- Theory of Knowledge Structures and Processes PDFDocument965 pagesTheory of Knowledge Structures and Processes PDFJhon Khan67% (3)
- PEY Final Internship Report Instructions 2015Document4 pagesPEY Final Internship Report Instructions 2015kinglbfNo ratings yet
- Critical Realism: Locke and DescartesDocument6 pagesCritical Realism: Locke and Descartesmoschub50% (2)
- Competency - Based Learning Materials: SectorDocument56 pagesCompetency - Based Learning Materials: SectorArnel Himzon100% (1)
- Build Data Warehouse With SQLiteDocument5 pagesBuild Data Warehouse With SQLiteAchmad ArdiNo ratings yet
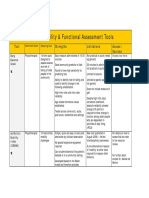
- 2013 Table 1 Mobility and Functional Assessment Tools PDFDocument4 pages2013 Table 1 Mobility and Functional Assessment Tools PDFesbat07No ratings yet
- Materi 2 - Obligation, Prohibition, and Suggestion - AdviceDocument12 pagesMateri 2 - Obligation, Prohibition, and Suggestion - AdviceShadrina ChaerunissaNo ratings yet
- ABCDocument8 pagesABCZhank Creex YusranNo ratings yet
- Unit 13 Work ExperienceDocument68 pagesUnit 13 Work ExperiencesajaniNo ratings yet
- Chapter 2 WoodwordDocument9 pagesChapter 2 WoodwordAlejandra Sánchez100% (1)
- Campbellbridges 2013Document51 pagesCampbellbridges 2013MULATNo ratings yet
- Chapter III - 7 Step Moral Reasoning ModelDocument19 pagesChapter III - 7 Step Moral Reasoning ModelKynne PineNo ratings yet
- Context Retention - Agoto - AlviarDocument21 pagesContext Retention - Agoto - AlviarMylene AlviarNo ratings yet
- Oceti Sakowin - Lesson 3 Kinship and HarmonyDocument4 pagesOceti Sakowin - Lesson 3 Kinship and Harmonyapi-539918550No ratings yet
- Psychology of PersuasionDocument21 pagesPsychology of PersuasionAhmet EbukNo ratings yet
- NỘI DUNG ÔN THI HỌC KÌ MÔN TIẾNG ANH 11Document8 pagesNỘI DUNG ÔN THI HỌC KÌ MÔN TIẾNG ANH 11Thiện MinhhNo ratings yet
- Essential Skills and Traits For Social WorkersDocument5 pagesEssential Skills and Traits For Social WorkersKUMAR SWAMINo ratings yet
- إنج302 Unit 10 Psychology - Lesson 1 Group Psychology (Part 1)Document16 pagesإنج302 Unit 10 Psychology - Lesson 1 Group Psychology (Part 1)AlaaNo ratings yet
- Differences in American and British English Grammar - Part 2Document3 pagesDifferences in American and British English Grammar - Part 2Alex GunaratnaNo ratings yet
- English Teaching CompetenciesDocument11 pagesEnglish Teaching Competenciesfrankramirez9663381No ratings yet