
Fundamental Matrix
Fundamental Matrix
You might also like
- RiPROCESS UserGuide Handling of Camera Data 2011-03-09Document22 pagesRiPROCESS UserGuide Handling of Camera Data 2011-03-09Ioana VizireanuNo ratings yet
- Comparison of No-Reference Image Quality Assessment Machine Learning-Based Algorithms On Compressed ImagesDocument10 pagesComparison of No-Reference Image Quality Assessment Machine Learning-Based Algorithms On Compressed ImagesMarcelo CobiasNo ratings yet
- A1388404476 - 64039 - 23 - 2023 - Machine Learning IIDocument10 pagesA1388404476 - 64039 - 23 - 2023 - Machine Learning IIraj241299No ratings yet
- ML Project Proposal Group (Num 10)Document7 pagesML Project Proposal Group (Num 10)wanyonyi kizitoNo ratings yet
- 2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsDocument10 pages2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsMohamed Hechmi JERIDINo ratings yet
- Nonuniform Sampling - The Theory and PraticeDocument56 pagesNonuniform Sampling - The Theory and PraticeSamba TraoreNo ratings yet
- Object Tracking With Self-Updating Tracking WindowDocument12 pagesObject Tracking With Self-Updating Tracking WindowSaeideh OraeiNo ratings yet
- A Simple Anomaly Detection For Spectral Imagery Using Co-Occurrence Statistics TechniquesDocument4 pagesA Simple Anomaly Detection For Spectral Imagery Using Co-Occurrence Statistics TechniqueszallpallNo ratings yet
- Article House Pricing ProblemsDocument15 pagesArticle House Pricing ProblemsWan HaziqNo ratings yet
- New Global Referencing Approach in A Camera-LCD MPSDocument18 pagesNew Global Referencing Approach in A Camera-LCD MPSjohn_k7408No ratings yet
- 5.1.1 Objective and Scope: Jyenis 2020Document8 pages5.1.1 Objective and Scope: Jyenis 2020Andam SaiNo ratings yet
- Assessment of Digital Image Correlation Measurement Errors: Methodology and ResultsDocument18 pagesAssessment of Digital Image Correlation Measurement Errors: Methodology and ResultsNádia SilvaNo ratings yet
- Paella AlgorithmDocument17 pagesPaella AlgorithmjavierzmorNo ratings yet
- ControladoresDocument19 pagesControladoresJesus HuamaniNo ratings yet
- Object Tracking Podium On Region Covariance For Recognition and ClassificationDocument6 pagesObject Tracking Podium On Region Covariance For Recognition and ClassificationInternational Association of Scientific Innovations and Research (IASIR)No ratings yet
- As Image Enhancement Systems Rely On Performance of Their Basic Arithmetical ComponentsDocument3 pagesAs Image Enhancement Systems Rely On Performance of Their Basic Arithmetical ComponentsIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Survey of Derivative-Free Optimization - Xi, Sun, Chen (2020)Document19 pagesSurvey of Derivative-Free Optimization - Xi, Sun, Chen (2020)Emerson ButynNo ratings yet
- David C. Baird Experimentation An Introduction To Measurement Theory and Experiment Design PDFDocument225 pagesDavid C. Baird Experimentation An Introduction To Measurement Theory and Experiment Design PDFPipí100% (1)
- Overview and Benchmarking of Motion Detection MethodsDocument26 pagesOverview and Benchmarking of Motion Detection MethodsTomislav LivnjakNo ratings yet
- Feature Extraction, Feature Selection and Machine Learning For Image Classification: A Case StudyDocument6 pagesFeature Extraction, Feature Selection and Machine Learning For Image Classification: A Case Studyshubhasish70No ratings yet
- 1 s2.0 S0957417423003548 Main PDFDocument9 pages1 s2.0 S0957417423003548 Main PDFsachinkuk6196No ratings yet
- 1991 Tristage Hough Transform For Multiple Ellipse ExtractionDocument9 pages1991 Tristage Hough Transform For Multiple Ellipse ExtractionNaranbaatar ErdenesurenNo ratings yet
- Digital Photogrammetry2014Document125 pagesDigital Photogrammetry2014iurist_nicoletaNo ratings yet
- Novelty Detection by Multivariate Kernel Density Estimation and Growing Neural Gas AlgorithmDocument10 pagesNovelty Detection by Multivariate Kernel Density Estimation and Growing Neural Gas AlgorithmgezixoNo ratings yet
- Yusro 2019 J. Phys. Conf. Ser. 1402 077066Document8 pagesYusro 2019 J. Phys. Conf. Ser. 1402 077066Muhammad YusroNo ratings yet
- Application of Soft Computing Approach For Edge DetectionDocument7 pagesApplication of Soft Computing Approach For Edge DetectionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Fea Ture Selection Neural Networks Philippe Leray and Patrick GallinariDocument22 pagesFea Ture Selection Neural Networks Philippe Leray and Patrick GallinariVbg DaNo ratings yet
- 2009 CDC NagyDocument7 pages2009 CDC NagyM Alifsyah Putra NasutionNo ratings yet
- 1 s2.0 S0266352X16300143 MainDocument10 pages1 s2.0 S0266352X16300143 Maina4abhirawatNo ratings yet
- John Wiley & SonsDocument35 pagesJohn Wiley & SonsLeulNo ratings yet
- Towards More Accurate Iris Recognition System by Using Hybrid Approach For Feature Extraction Along With ClassifierDocument12 pagesTowards More Accurate Iris Recognition System by Using Hybrid Approach For Feature Extraction Along With ClassifierIJRES teamNo ratings yet
- For Extra InfoDocument25 pagesFor Extra InfoAyra KhattakNo ratings yet
- A Statistical Process Control Method For Semiconductor ManufacturingDocument9 pagesA Statistical Process Control Method For Semiconductor ManufacturingClementeNo ratings yet
- Keypoint Recognition Using Randomized TreesDocument29 pagesKeypoint Recognition Using Randomized TreesTigrex22No ratings yet
- Bourne, DavidW. A. - Strauss, Steven - Mathematical Modeling of Pharmacokinetic Data (2018, CRC Press - Routledge)Document153 pagesBourne, DavidW. A. - Strauss, Steven - Mathematical Modeling of Pharmacokinetic Data (2018, CRC Press - Routledge)GuillermoNo ratings yet
- Multimodal Biometric System Based Palmprzint and IrisDocument5 pagesMultimodal Biometric System Based Palmprzint and IrisRaj LoVeNo ratings yet
- Applied Soft Computing Journal: EditorialDocument3 pagesApplied Soft Computing Journal: EditorialEwerton DuarteNo ratings yet
- ESE306-lecture 1Document34 pagesESE306-lecture 1masamba10No ratings yet
- Zhai 2015Document9 pagesZhai 2015fhamdiNo ratings yet
- Niethammer2008 PAMI Geometric Observers For Dynamically Evolving CurvesDocument18 pagesNiethammer2008 PAMI Geometric Observers For Dynamically Evolving CurvesmarcniethammerNo ratings yet
- Bayesian Modeling Using The MCMC ProcedureDocument22 pagesBayesian Modeling Using The MCMC ProcedureKian JahromiNo ratings yet
- 1 s2.0 S0016003223002533 MainDocument26 pages1 s2.0 S0016003223002533 Maincepheid_luNo ratings yet
- Final Project ReportDocument18 pagesFinal Project ReportjstpallavNo ratings yet
- An Efficient Technique For Iris Recocognition Based On Eni FeaturesDocument6 pagesAn Efficient Technique For Iris Recocognition Based On Eni FeaturesKampa LavanyaNo ratings yet
- Iris Recognition Using Support Vector Machine and Least Squares Support Vector Machine: A Comparative StudyDocument6 pagesIris Recognition Using Support Vector Machine and Least Squares Support Vector Machine: A Comparative StudyademaralveNo ratings yet
- Boudine 2016Document20 pagesBoudine 2016Mounir El MaghraouiNo ratings yet
- Ullah 2019Document6 pagesUllah 2019Dinar TASNo ratings yet
- Image Restoration Is The Process of Removal of Noise in An IMAGEDocument7 pagesImage Restoration Is The Process of Removal of Noise in An IMAGERishita jainNo ratings yet
- The Realization of A Type of Supermarket Sales Forecast Model & SystemDocument6 pagesThe Realization of A Type of Supermarket Sales Forecast Model & SystemAnoop DixitNo ratings yet
- Hossein I 2020Document19 pagesHossein I 2020Luis CarvalhoNo ratings yet
- NLS Tools ForDocument21 pagesNLS Tools ForTylerNo ratings yet
- A Combination of Newton-Raphson Method and HeuristDocument14 pagesA Combination of Newton-Raphson Method and Heuristpat juvNo ratings yet
- Machine LearningDocument55 pagesMachine Learningsaurabh khairnarNo ratings yet
- Uncertainty Propagation Using Polynomial Chaos and Centre Manifold TheoriesDocument6 pagesUncertainty Propagation Using Polynomial Chaos and Centre Manifold Theorieskxty.love.jjNo ratings yet
- Survey FinalDocument6 pagesSurvey FinalEPIC BASS DROPSNo ratings yet
- An Insight Into The Algorithms On Real-Time People Tracking and Counting SystemDocument6 pagesAn Insight Into The Algorithms On Real-Time People Tracking and Counting SystemRandy ArtNo ratings yet
- 1 s2.0 S0031320307002579 Main PDFDocument13 pages1 s2.0 S0031320307002579 Main PDFSonia R. BaldárragoNo ratings yet
- 1 s2.0 S0031320303001195 MainDocument13 pages1 s2.0 S0031320303001195 MainajgallegoNo ratings yet
- Good Morning: Simulation OF Scheduling AlgorithmDocument23 pagesGood Morning: Simulation OF Scheduling AlgorithmnannupriyaNo ratings yet
- Mixture Models and ApplicationsFrom EverandMixture Models and ApplicationsNizar BouguilaNo ratings yet
- MadhubalakichuDocument29 pagesMadhubalakichuHaaa Yh9No ratings yet
- 3 Image Measurement and Corrections To Photo Coordinates: Chapter ThreeDocument24 pages3 Image Measurement and Corrections To Photo Coordinates: Chapter ThreeJoshi ChumbaleNo ratings yet
- Lec 9Document51 pagesLec 9Saad khalilNo ratings yet
- Agisoft Metashape User Manual: Standard Edition, Version 1.6Document89 pagesAgisoft Metashape User Manual: Standard Edition, Version 1.6Sam OluNo ratings yet
- PhotogrammetryDocument54 pagesPhotogrammetrylomecaNo ratings yet
- A Laser Triangulation-Based 3D Measurement System For Inner Surface of Deep HolesDocument7 pagesA Laser Triangulation-Based 3D Measurement System For Inner Surface of Deep Holes林北煎包侠No ratings yet
- A4 ChessboardDocument1 pageA4 ChessboardSugar MonorelNo ratings yet
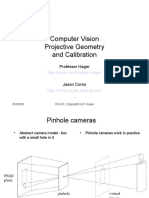
- Computer Vision Projective Geometry and Calibration: Professor HagerDocument67 pagesComputer Vision Projective Geometry and Calibration: Professor Hagersab108No ratings yet
- Literature Survey On Multi-Camera System and Its ADocument31 pagesLiterature Survey On Multi-Camera System and Its A3bbass2010No ratings yet
- A Four-Step Camera Calibration Procedure With Implicit Image CorrectionDocument7 pagesA Four-Step Camera Calibration Procedure With Implicit Image CorrectiondgrnwdNo ratings yet
- Framework of Advanced Driving Assistance System (ADAS) ResearchDocument8 pagesFramework of Advanced Driving Assistance System (ADAS) ResearchherusyahputraNo ratings yet
- Flexible Videogrammetric Technique For Three-Dimensional Structural Vibration MeasurementDocument9 pagesFlexible Videogrammetric Technique For Three-Dimensional Structural Vibration MeasurementBridge&StructureNo ratings yet
- Agisoft Metashape User Manual: Standard Edition, Version 1.8Document99 pagesAgisoft Metashape User Manual: Standard Edition, Version 1.8Marcos NascimentoNo ratings yet
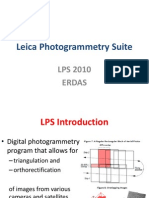
- Leica Photogrammetry Suite2Document33 pagesLeica Photogrammetry Suite2andrestlzNo ratings yet
- Apple Crop-Load Estimation With Over-The-Row Machine Vision SystemDocument10 pagesApple Crop-Load Estimation With Over-The-Row Machine Vision SystemRoosvelt GarcíaNo ratings yet
- Orthomosaic and DEM Generation With Agisoft PhotoScan TutorialDocument20 pagesOrthomosaic and DEM Generation With Agisoft PhotoScan TutorialClement KipyegonNo ratings yet
- TFDEN 133 004 - NV ProDocument294 pagesTFDEN 133 004 - NV ProAutoman IntertradeNo ratings yet
- A Flexible New Technique For Camera CalibrationDocument40 pagesA Flexible New Technique For Camera CalibrationMade TokeNo ratings yet
- GEO 2204: Photogrammetry I: Magemeso IbrahimDocument93 pagesGEO 2204: Photogrammetry I: Magemeso IbrahimKarungi AroneNo ratings yet
- Metashape-Pro 1 6 en PDFDocument160 pagesMetashape-Pro 1 6 en PDFIle SartuziNo ratings yet
- Machine Vision For Visual TestingDocument22 pagesMachine Vision For Visual TestingMuhammad UmairNo ratings yet
- Robosot Parking Setting Up Guide: Arif RahmanDocument18 pagesRobosot Parking Setting Up Guide: Arif Rahmanamakil76No ratings yet
- CVF07 Lec07-08Document22 pagesCVF07 Lec07-08api-3709263No ratings yet
- Report Photo Interior & ExteriorDocument37 pagesReport Photo Interior & ExteriorNik AmirNo ratings yet
- MC-Calib: A Generic and Robust Calibration Toolbox For Multi-Camera Systems (Preprint)Document16 pagesMC-Calib: A Generic and Robust Calibration Toolbox For Multi-Camera Systems (Preprint)Mathieu PlagneNo ratings yet
- Full Download Book Computer Vision Theory Algorithms Practicalities PDFDocument41 pagesFull Download Book Computer Vision Theory Algorithms Practicalities PDFmara.velazquez241100% (24)
- Rosen Diankov ThesisDocument263 pagesRosen Diankov Thesisrosen_diankovNo ratings yet
- Self Calibration of Small and Medium Format Digital CamerasDocument6 pagesSelf Calibration of Small and Medium Format Digital CamerasOke Joko HaniloNo ratings yet
- Introduction To Q-400 Digital Image Correlation V2Document5 pagesIntroduction To Q-400 Digital Image Correlation V2Alex J. GonzálezNo ratings yet
























































































Download as pdf or txt
You might also like
- RiPROCESS UserGuide Handling of Camera Data 2011-03-09Document22 pagesRiPROCESS UserGuide Handling of Camera Data 2011-03-09Ioana VizireanuNo ratings yet
- Comparison of No-Reference Image Quality Assessment Machine Learning-Based Algorithms On Compressed ImagesDocument10 pagesComparison of No-Reference Image Quality Assessment Machine Learning-Based Algorithms On Compressed ImagesMarcelo CobiasNo ratings yet
- A1388404476 - 64039 - 23 - 2023 - Machine Learning IIDocument10 pagesA1388404476 - 64039 - 23 - 2023 - Machine Learning IIraj241299No ratings yet
- ML Project Proposal Group (Num 10)Document7 pagesML Project Proposal Group (Num 10)wanyonyi kizitoNo ratings yet
- 2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsDocument10 pages2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsMohamed Hechmi JERIDINo ratings yet
- Nonuniform Sampling - The Theory and PraticeDocument56 pagesNonuniform Sampling - The Theory and PraticeSamba TraoreNo ratings yet
- Object Tracking With Self-Updating Tracking WindowDocument12 pagesObject Tracking With Self-Updating Tracking WindowSaeideh OraeiNo ratings yet
- A Simple Anomaly Detection For Spectral Imagery Using Co-Occurrence Statistics TechniquesDocument4 pagesA Simple Anomaly Detection For Spectral Imagery Using Co-Occurrence Statistics TechniqueszallpallNo ratings yet
- Article House Pricing ProblemsDocument15 pagesArticle House Pricing ProblemsWan HaziqNo ratings yet
- New Global Referencing Approach in A Camera-LCD MPSDocument18 pagesNew Global Referencing Approach in A Camera-LCD MPSjohn_k7408No ratings yet
- 5.1.1 Objective and Scope: Jyenis 2020Document8 pages5.1.1 Objective and Scope: Jyenis 2020Andam SaiNo ratings yet
- Assessment of Digital Image Correlation Measurement Errors: Methodology and ResultsDocument18 pagesAssessment of Digital Image Correlation Measurement Errors: Methodology and ResultsNádia SilvaNo ratings yet
- Paella AlgorithmDocument17 pagesPaella AlgorithmjavierzmorNo ratings yet
- ControladoresDocument19 pagesControladoresJesus HuamaniNo ratings yet
- Object Tracking Podium On Region Covariance For Recognition and ClassificationDocument6 pagesObject Tracking Podium On Region Covariance For Recognition and ClassificationInternational Association of Scientific Innovations and Research (IASIR)No ratings yet
- As Image Enhancement Systems Rely On Performance of Their Basic Arithmetical ComponentsDocument3 pagesAs Image Enhancement Systems Rely On Performance of Their Basic Arithmetical ComponentsIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Survey of Derivative-Free Optimization - Xi, Sun, Chen (2020)Document19 pagesSurvey of Derivative-Free Optimization - Xi, Sun, Chen (2020)Emerson ButynNo ratings yet
- David C. Baird Experimentation An Introduction To Measurement Theory and Experiment Design PDFDocument225 pagesDavid C. Baird Experimentation An Introduction To Measurement Theory and Experiment Design PDFPipí100% (1)
- Overview and Benchmarking of Motion Detection MethodsDocument26 pagesOverview and Benchmarking of Motion Detection MethodsTomislav LivnjakNo ratings yet
- Feature Extraction, Feature Selection and Machine Learning For Image Classification: A Case StudyDocument6 pagesFeature Extraction, Feature Selection and Machine Learning For Image Classification: A Case Studyshubhasish70No ratings yet
- 1 s2.0 S0957417423003548 Main PDFDocument9 pages1 s2.0 S0957417423003548 Main PDFsachinkuk6196No ratings yet
- 1991 Tristage Hough Transform For Multiple Ellipse ExtractionDocument9 pages1991 Tristage Hough Transform For Multiple Ellipse ExtractionNaranbaatar ErdenesurenNo ratings yet
- Digital Photogrammetry2014Document125 pagesDigital Photogrammetry2014iurist_nicoletaNo ratings yet
- Novelty Detection by Multivariate Kernel Density Estimation and Growing Neural Gas AlgorithmDocument10 pagesNovelty Detection by Multivariate Kernel Density Estimation and Growing Neural Gas AlgorithmgezixoNo ratings yet
- Yusro 2019 J. Phys. Conf. Ser. 1402 077066Document8 pagesYusro 2019 J. Phys. Conf. Ser. 1402 077066Muhammad YusroNo ratings yet
- Application of Soft Computing Approach For Edge DetectionDocument7 pagesApplication of Soft Computing Approach For Edge DetectionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Fea Ture Selection Neural Networks Philippe Leray and Patrick GallinariDocument22 pagesFea Ture Selection Neural Networks Philippe Leray and Patrick GallinariVbg DaNo ratings yet
- 2009 CDC NagyDocument7 pages2009 CDC NagyM Alifsyah Putra NasutionNo ratings yet
- 1 s2.0 S0266352X16300143 MainDocument10 pages1 s2.0 S0266352X16300143 Maina4abhirawatNo ratings yet
- John Wiley & SonsDocument35 pagesJohn Wiley & SonsLeulNo ratings yet
- Towards More Accurate Iris Recognition System by Using Hybrid Approach For Feature Extraction Along With ClassifierDocument12 pagesTowards More Accurate Iris Recognition System by Using Hybrid Approach For Feature Extraction Along With ClassifierIJRES teamNo ratings yet
- For Extra InfoDocument25 pagesFor Extra InfoAyra KhattakNo ratings yet
- A Statistical Process Control Method For Semiconductor ManufacturingDocument9 pagesA Statistical Process Control Method For Semiconductor ManufacturingClementeNo ratings yet
- Keypoint Recognition Using Randomized TreesDocument29 pagesKeypoint Recognition Using Randomized TreesTigrex22No ratings yet
- Bourne, DavidW. A. - Strauss, Steven - Mathematical Modeling of Pharmacokinetic Data (2018, CRC Press - Routledge)Document153 pagesBourne, DavidW. A. - Strauss, Steven - Mathematical Modeling of Pharmacokinetic Data (2018, CRC Press - Routledge)GuillermoNo ratings yet
- Multimodal Biometric System Based Palmprzint and IrisDocument5 pagesMultimodal Biometric System Based Palmprzint and IrisRaj LoVeNo ratings yet
- Applied Soft Computing Journal: EditorialDocument3 pagesApplied Soft Computing Journal: EditorialEwerton DuarteNo ratings yet
- ESE306-lecture 1Document34 pagesESE306-lecture 1masamba10No ratings yet
- Zhai 2015Document9 pagesZhai 2015fhamdiNo ratings yet
- Niethammer2008 PAMI Geometric Observers For Dynamically Evolving CurvesDocument18 pagesNiethammer2008 PAMI Geometric Observers For Dynamically Evolving CurvesmarcniethammerNo ratings yet
- Bayesian Modeling Using The MCMC ProcedureDocument22 pagesBayesian Modeling Using The MCMC ProcedureKian JahromiNo ratings yet
- 1 s2.0 S0016003223002533 MainDocument26 pages1 s2.0 S0016003223002533 Maincepheid_luNo ratings yet
- Final Project ReportDocument18 pagesFinal Project ReportjstpallavNo ratings yet
- An Efficient Technique For Iris Recocognition Based On Eni FeaturesDocument6 pagesAn Efficient Technique For Iris Recocognition Based On Eni FeaturesKampa LavanyaNo ratings yet
- Iris Recognition Using Support Vector Machine and Least Squares Support Vector Machine: A Comparative StudyDocument6 pagesIris Recognition Using Support Vector Machine and Least Squares Support Vector Machine: A Comparative StudyademaralveNo ratings yet
- Boudine 2016Document20 pagesBoudine 2016Mounir El MaghraouiNo ratings yet
- Ullah 2019Document6 pagesUllah 2019Dinar TASNo ratings yet
- Image Restoration Is The Process of Removal of Noise in An IMAGEDocument7 pagesImage Restoration Is The Process of Removal of Noise in An IMAGERishita jainNo ratings yet
- The Realization of A Type of Supermarket Sales Forecast Model & SystemDocument6 pagesThe Realization of A Type of Supermarket Sales Forecast Model & SystemAnoop DixitNo ratings yet
- Hossein I 2020Document19 pagesHossein I 2020Luis CarvalhoNo ratings yet
- NLS Tools ForDocument21 pagesNLS Tools ForTylerNo ratings yet
- A Combination of Newton-Raphson Method and HeuristDocument14 pagesA Combination of Newton-Raphson Method and Heuristpat juvNo ratings yet
- Machine LearningDocument55 pagesMachine Learningsaurabh khairnarNo ratings yet
- Uncertainty Propagation Using Polynomial Chaos and Centre Manifold TheoriesDocument6 pagesUncertainty Propagation Using Polynomial Chaos and Centre Manifold Theorieskxty.love.jjNo ratings yet
- Survey FinalDocument6 pagesSurvey FinalEPIC BASS DROPSNo ratings yet
- An Insight Into The Algorithms On Real-Time People Tracking and Counting SystemDocument6 pagesAn Insight Into The Algorithms On Real-Time People Tracking and Counting SystemRandy ArtNo ratings yet
- 1 s2.0 S0031320307002579 Main PDFDocument13 pages1 s2.0 S0031320307002579 Main PDFSonia R. BaldárragoNo ratings yet
- 1 s2.0 S0031320303001195 MainDocument13 pages1 s2.0 S0031320303001195 MainajgallegoNo ratings yet
- Good Morning: Simulation OF Scheduling AlgorithmDocument23 pagesGood Morning: Simulation OF Scheduling AlgorithmnannupriyaNo ratings yet
- Mixture Models and ApplicationsFrom EverandMixture Models and ApplicationsNizar BouguilaNo ratings yet
- MadhubalakichuDocument29 pagesMadhubalakichuHaaa Yh9No ratings yet
- 3 Image Measurement and Corrections To Photo Coordinates: Chapter ThreeDocument24 pages3 Image Measurement and Corrections To Photo Coordinates: Chapter ThreeJoshi ChumbaleNo ratings yet
- Lec 9Document51 pagesLec 9Saad khalilNo ratings yet
- Agisoft Metashape User Manual: Standard Edition, Version 1.6Document89 pagesAgisoft Metashape User Manual: Standard Edition, Version 1.6Sam OluNo ratings yet
- PhotogrammetryDocument54 pagesPhotogrammetrylomecaNo ratings yet
- A Laser Triangulation-Based 3D Measurement System For Inner Surface of Deep HolesDocument7 pagesA Laser Triangulation-Based 3D Measurement System For Inner Surface of Deep Holes林北煎包侠No ratings yet
- A4 ChessboardDocument1 pageA4 ChessboardSugar MonorelNo ratings yet
- Computer Vision Projective Geometry and Calibration: Professor HagerDocument67 pagesComputer Vision Projective Geometry and Calibration: Professor Hagersab108No ratings yet
- Literature Survey On Multi-Camera System and Its ADocument31 pagesLiterature Survey On Multi-Camera System and Its A3bbass2010No ratings yet
- A Four-Step Camera Calibration Procedure With Implicit Image CorrectionDocument7 pagesA Four-Step Camera Calibration Procedure With Implicit Image CorrectiondgrnwdNo ratings yet
- Framework of Advanced Driving Assistance System (ADAS) ResearchDocument8 pagesFramework of Advanced Driving Assistance System (ADAS) ResearchherusyahputraNo ratings yet
- Flexible Videogrammetric Technique For Three-Dimensional Structural Vibration MeasurementDocument9 pagesFlexible Videogrammetric Technique For Three-Dimensional Structural Vibration MeasurementBridge&StructureNo ratings yet
- Agisoft Metashape User Manual: Standard Edition, Version 1.8Document99 pagesAgisoft Metashape User Manual: Standard Edition, Version 1.8Marcos NascimentoNo ratings yet
- Leica Photogrammetry Suite2Document33 pagesLeica Photogrammetry Suite2andrestlzNo ratings yet
- Apple Crop-Load Estimation With Over-The-Row Machine Vision SystemDocument10 pagesApple Crop-Load Estimation With Over-The-Row Machine Vision SystemRoosvelt GarcíaNo ratings yet
- Orthomosaic and DEM Generation With Agisoft PhotoScan TutorialDocument20 pagesOrthomosaic and DEM Generation With Agisoft PhotoScan TutorialClement KipyegonNo ratings yet
- TFDEN 133 004 - NV ProDocument294 pagesTFDEN 133 004 - NV ProAutoman IntertradeNo ratings yet
- A Flexible New Technique For Camera CalibrationDocument40 pagesA Flexible New Technique For Camera CalibrationMade TokeNo ratings yet
- GEO 2204: Photogrammetry I: Magemeso IbrahimDocument93 pagesGEO 2204: Photogrammetry I: Magemeso IbrahimKarungi AroneNo ratings yet
- Metashape-Pro 1 6 en PDFDocument160 pagesMetashape-Pro 1 6 en PDFIle SartuziNo ratings yet
- Machine Vision For Visual TestingDocument22 pagesMachine Vision For Visual TestingMuhammad UmairNo ratings yet
- Robosot Parking Setting Up Guide: Arif RahmanDocument18 pagesRobosot Parking Setting Up Guide: Arif Rahmanamakil76No ratings yet
- CVF07 Lec07-08Document22 pagesCVF07 Lec07-08api-3709263No ratings yet
- Report Photo Interior & ExteriorDocument37 pagesReport Photo Interior & ExteriorNik AmirNo ratings yet
- MC-Calib: A Generic and Robust Calibration Toolbox For Multi-Camera Systems (Preprint)Document16 pagesMC-Calib: A Generic and Robust Calibration Toolbox For Multi-Camera Systems (Preprint)Mathieu PlagneNo ratings yet
- Full Download Book Computer Vision Theory Algorithms Practicalities PDFDocument41 pagesFull Download Book Computer Vision Theory Algorithms Practicalities PDFmara.velazquez241100% (24)
- Rosen Diankov ThesisDocument263 pagesRosen Diankov Thesisrosen_diankovNo ratings yet
- Self Calibration of Small and Medium Format Digital CamerasDocument6 pagesSelf Calibration of Small and Medium Format Digital CamerasOke Joko HaniloNo ratings yet
- Introduction To Q-400 Digital Image Correlation V2Document5 pagesIntroduction To Q-400 Digital Image Correlation V2Alex J. GonzálezNo ratings yet