Download as pdf or txt
You might also like
- Case Study Report On The Case of The Killer RobotDocument7 pagesCase Study Report On The Case of The Killer Robotconchajohann305No ratings yet
- Design Calculation of Wall FormworkDocument7 pagesDesign Calculation of Wall FormworkJun Rey Morales100% (3)
- L8 - Example For Jacobian of RobotsDocument8 pagesL8 - Example For Jacobian of RobotsZul Fadhli100% (1)
- RoboticsDocument37 pagesRobotics9944805552No ratings yet
- DWG List LandscapeDocument4 pagesDWG List Landscapemasahin100% (1)
- Component Catalogue Formwork 2009 enDocument652 pagesComponent Catalogue Formwork 2009 enClaudiu Ciorobitca100% (2)
- Chess Playing Robotic ArmDocument9 pagesChess Playing Robotic ArmMustafaMirNo ratings yet
- Research Areas For Mechatronics EngineeringDocument2 pagesResearch Areas For Mechatronics EngineeringRohithGiridharan100% (1)
- Chapter 1 PM CM SMDocument67 pagesChapter 1 PM CM SMZulhelmi MansorNo ratings yet
- References 1Document2 pagesReferences 1Anuj PalNo ratings yet
- L9 - Trajectory Planning - 1 V1Document15 pagesL9 - Trajectory Planning - 1 V1zul_fadhli_1988No ratings yet
- Robotics - Mumbai Univ - Sem 8 ElexDocument8 pagesRobotics - Mumbai Univ - Sem 8 Elex111ashwin0% (1)
- r05320305 Design of Machine Members IIDocument11 pagesr05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- Robotics in ManufacturingDocument8 pagesRobotics in ManufacturingJadelyn MangondatoNo ratings yet
- iNaCoMM 2019Document9 pagesiNaCoMM 2019anuNo ratings yet
- RoboticsDocument1 pageRoboticsDeepak SinghNo ratings yet
- Humanoid RobotDocument16 pagesHumanoid RobotShubham PundirNo ratings yet
- Design and Construction of A Manipulator Type ScaraDocument9 pagesDesign and Construction of A Manipulator Type ScaraHari Kirupakar100% (1)
- On RoboticsDocument47 pagesOn RoboticsNeha Rathore100% (2)
- A New 6-DOF Parallel Robot With Simple Kinematic Model: Nicholas Seward, Ilian A. Bonev, Senior Member, IEEEDocument6 pagesA New 6-DOF Parallel Robot With Simple Kinematic Model: Nicholas Seward, Ilian A. Bonev, Senior Member, IEEEAhmedSeragNo ratings yet
- Wheel Leg 2011-224Document8 pagesWheel Leg 2011-224idorofte8235No ratings yet
- Elements of Mechanical Engg Syllabus (VTU)Document4 pagesElements of Mechanical Engg Syllabus (VTU)Prabhu SwamyNo ratings yet
- Industrial Robots: Presented By: Sachin Dhopade B.E Iv/Iv PH No. 09866584839 Mechanical Engineering (Production) MVSRDocument34 pagesIndustrial Robots: Presented By: Sachin Dhopade B.E Iv/Iv PH No. 09866584839 Mechanical Engineering (Production) MVSRSachin DhopadeNo ratings yet
- C Robcad Online Manuals Userman Userman-2-2Document3 pagesC Robcad Online Manuals Userman Userman-2-2iperico68No ratings yet
- ROBOTDocument29 pagesROBOTkuldeepNo ratings yet
- Ceg4158 PDCDocument4 pagesCeg4158 PDCZichao ZhangNo ratings yet
- Design and Manufacturing of Low Cost Scara Robot IJERTV10IS060027-With-cover-page-V2 3Document5 pagesDesign and Manufacturing of Low Cost Scara Robot IJERTV10IS060027-With-cover-page-V2 3Omar MuhammadNo ratings yet
- ScaraDocument7 pagesScaraAnand Kumar MishraNo ratings yet
- Competition Statute For Simple Line-Following Robots: 1. Author of The StatuteDocument4 pagesCompetition Statute For Simple Line-Following Robots: 1. Author of The StatutendtrobotNo ratings yet
- Walking Trajectory Control of A Biped RobotDocument18 pagesWalking Trajectory Control of A Biped RobotBogdan PopNo ratings yet
- Challenges of Tribology in Space Mechanisms-LG V2 PDFDocument48 pagesChallenges of Tribology in Space Mechanisms-LG V2 PDFasantori6133No ratings yet
- RoboticsDocument5 pagesRoboticsrkNo ratings yet
- SCARA Robot Lab ManualDocument19 pagesSCARA Robot Lab ManualDaniaNo ratings yet
- Tribology For Space ApplicationsDocument8 pagesTribology For Space Applicationsasantori6133No ratings yet
- Chapter 11 Robotics in Manufacturing Processes p182-197Document21 pagesChapter 11 Robotics in Manufacturing Processes p182-197api-152132438No ratings yet
- ME424 201516 Unit 1 PDFDocument41 pagesME424 201516 Unit 1 PDFharshaNo ratings yet
- Cs602 Collection of Old PapersDocument45 pagesCs602 Collection of Old Paperscs619finalproject.comNo ratings yet
- Industrial RoboticsDocument30 pagesIndustrial RoboticssoniyagoyalNo ratings yet
- Mechatronics - UNIT1-FHDocument23 pagesMechatronics - UNIT1-FHsaba100% (3)
- Introduction To Robot SoccerDocument94 pagesIntroduction To Robot Soccerdek0ne100% (1)
- Robotics and Machinee LearningDocument23 pagesRobotics and Machinee LearningJasmin HrvatovicNo ratings yet
- Intelligent Inverse Kinematic Control of Scorbot-Er V Plus Robot ManipulatorDocument12 pagesIntelligent Inverse Kinematic Control of Scorbot-Er V Plus Robot ManipulatorIJAET JournalNo ratings yet
- RoboticsDocument1 pageRoboticstagoreboopathyNo ratings yet
- IAE Robotics Course DescriptionDocument6 pagesIAE Robotics Course Descriptionsatheesh kumarNo ratings yet
- Robot PDFDocument2 pagesRobot PDFDedy WijayaNo ratings yet
- 12p602 Robotics and Machine Vision System SyllabusDocument2 pages12p602 Robotics and Machine Vision System Syllabusmskumar_5540% (1)
- Sri Venkateswara College of Engineering Course Delivery Plan - Theory Page 1 of 6Document6 pagesSri Venkateswara College of Engineering Course Delivery Plan - Theory Page 1 of 6Ravinder Reddy SimalaNo ratings yet
- Analytical Inverse Kinematics Algorithm of 5 Dof Robot ArmDocument13 pagesAnalytical Inverse Kinematics Algorithm of 5 Dof Robot ArmsathyaNo ratings yet
- 139 Notes s16Document66 pages139 Notes s16Carl Patrick Erni RagasNo ratings yet
- Robotics Unit-5 Question BankDocument6 pagesRobotics Unit-5 Question BankveerapandianNo ratings yet
- 2015 Design KumarDocument43 pages2015 Design Kumardudde niranjanNo ratings yet
- Walking Movement in RobotDocument24 pagesWalking Movement in RobotNandy ObNo ratings yet
- Module 02 - Robot KinematicsDocument46 pagesModule 02 - Robot KinematicsRisha AnurajNo ratings yet
- Distributed Control of Robotic Networks: A Mathematical Approach to Motion Coordination AlgorithmsFrom EverandDistributed Control of Robotic Networks: A Mathematical Approach to Motion Coordination AlgorithmsRating: 5 out of 5 stars5/5 (1)
- Design Developmentof THEROBUSTAn Autonomous Mobile RobotDocument10 pagesDesign Developmentof THEROBUSTAn Autonomous Mobile RobotRamy ChaayaNo ratings yet
- Ilovepdf MergedDocument368 pagesIlovepdf MergedKiều TrinhNo ratings yet
- 1software Engineering - Lect#1Document18 pages1software Engineering - Lect#1Shozab SohailNo ratings yet
- Unit 3Document88 pagesUnit 3avm5439No ratings yet
- SE Unit-1Document84 pagesSE Unit-1Shiv PatelNo ratings yet
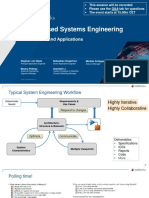
- MBSE - Practical Use and ApplicationsDocument37 pagesMBSE - Practical Use and ApplicationsSatana UccisoreNo ratings yet
- 1 - Introduction To Software EngineeringDocument8 pages1 - Introduction To Software EngineeringNa GarenNo ratings yet
- 1 - Introduction To Software EngineeringDocument8 pages1 - Introduction To Software EngineeringNa GarenNo ratings yet
- Online Grocery StoreDocument35 pagesOnline Grocery StoreKavita SharmaNo ratings yet
- Creating Shims and Adding The Shims To MsiDocument9 pagesCreating Shims and Adding The Shims To MsiSudhaNo ratings yet
- Grating and Expanded Metal CatalogDocument68 pagesGrating and Expanded Metal CatalogsivaNo ratings yet
- OpenSpan Server 5.2 Admin and User GuideDocument122 pagesOpenSpan Server 5.2 Admin and User GuidekrunalparikhNo ratings yet
- JA SteinDocument69 pagesJA SteinNishant Sharma100% (1)
- Eve Blau Comments On SANAA 2010 EssayDocument7 pagesEve Blau Comments On SANAA 2010 EssayIlaria BernardiNo ratings yet
- Approach Sight Singing Fifth EditionDocument3 pagesApproach Sight Singing Fifth Editionfbshow0% (2)
- LonworksDocument33 pagesLonworksshanadhNo ratings yet
- PeopleSoft Integration BrokerDocument892 pagesPeopleSoft Integration BrokerRafael Medina S0% (1)
- How To Install SAP Enhancement Package 4 For SAP ERP 6.0: A Practical GuideDocument29 pagesHow To Install SAP Enhancement Package 4 For SAP ERP 6.0: A Practical GuidePratip BhattacharyyaNo ratings yet
- Full Download Discover Biology Core Topics 5th Edition Cundy Test BankDocument35 pagesFull Download Discover Biology Core Topics 5th Edition Cundy Test Bankelenoretupper100% (37)
- TheanalysisofthenewstrategicareaofHamburg TheredevelopmentprojectoftheHafencityswaterfrontDocument22 pagesTheanalysisofthenewstrategicareaofHamburg TheredevelopmentprojectoftheHafencityswaterfrontAndrei IngelbergNo ratings yet
- GPRS OverviewDocument336 pagesGPRS Overviewqlm_dhvtNo ratings yet
- Kim Lighting Concept 5000 Series Brochure 1986Document24 pagesKim Lighting Concept 5000 Series Brochure 1986Alan MastersNo ratings yet
- 9 Priya Joseph - Paper For Research TrendDocument5 pages9 Priya Joseph - Paper For Research TrendArchana M NairNo ratings yet
- Evaluasi Keandalan Sistem Proteksi Kebakaran Ditinjau Dari Sarana Penyelamatan Dan Sistem Proteksi Pasif Kebakaran Di Gedung Lawang Sewu SemarangDocument13 pagesEvaluasi Keandalan Sistem Proteksi Kebakaran Ditinjau Dari Sarana Penyelamatan Dan Sistem Proteksi Pasif Kebakaran Di Gedung Lawang Sewu SemarangNyimas RachmawatiNo ratings yet
- Sample Project Method Statement Rev 0 04/04/2016: Installation of Windows, Doors, Curtain Wall and Terracotta RainscreenDocument32 pagesSample Project Method Statement Rev 0 04/04/2016: Installation of Windows, Doors, Curtain Wall and Terracotta RainscreenpeterandreaNo ratings yet
- Air ConditioningDocument16 pagesAir ConditioningSafiza Saleh100% (1)
- Case Study AbstractDocument3 pagesCase Study AbstractprabaharanNo ratings yet
- BlueCoat ProxyAVDocument23 pagesBlueCoat ProxyAVRamlan Md NorNo ratings yet
- Actix Guideline: Prepared by Rulie N ArifinDocument22 pagesActix Guideline: Prepared by Rulie N ArifinDoni AriyantoNo ratings yet
- Full Training Report 77Document13 pagesFull Training Report 77Navodit SharmaNo ratings yet
- FMDS0521Metal Halide High-Intensity Discharge (HID) Lighting PDFDocument12 pagesFMDS0521Metal Halide High-Intensity Discharge (HID) Lighting PDFAnonymous wtK1AZBiNo ratings yet
- AMCC Move Out ProceduresDocument1 pageAMCC Move Out Proceduresjeffrey_m_petersNo ratings yet
- AWR - Advisor - Brawnbag - 180305Document26 pagesAWR - Advisor - Brawnbag - 180305zahazhNo ratings yet
- Consultant Architect: Project: Head Office: Client:: Shahid Yousuf PartnersDocument21 pagesConsultant Architect: Project: Head Office: Client:: Shahid Yousuf Partnersrameez khanNo ratings yet
- Node B Integration Instructions For Ericsson 3308Document3 pagesNode B Integration Instructions For Ericsson 3308Reej Thomas100% (2)