
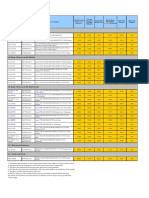
RISC Instruction Set:: I) Data Manipulation Instructions
RISC Instruction Set:: I) Data Manipulation Instructions
You might also like
- HW Assignment 5Document3 pagesHW Assignment 5abdul basitNo ratings yet
- Implementation of A 16-Bit RISC Processor Using FPGA ProgrammingDocument25 pagesImplementation of A 16-Bit RISC Processor Using FPGA ProgrammingTejashree100% (3)
- Coa Unit - 5 NotesDocument6 pagesCoa Unit - 5 Notes1NT19IS077-MADHURI.CNo ratings yet
- Draw The Block Diagram of Von Neumann Architecture and Explain About Its Parts in Brief AnswerDocument7 pagesDraw The Block Diagram of Von Neumann Architecture and Explain About Its Parts in Brief AnswerhayerpaNo ratings yet
- UNIT-3: MIPS InstructionsDocument15 pagesUNIT-3: MIPS InstructionsMukeshram.B AIDS20No ratings yet
- Cyan 2800398239029h09fn0ivj0vcjb0Document16 pagesCyan 2800398239029h09fn0ivj0vcjb0Anonymous zWBss8LKNo ratings yet
- Module 2 Chapter 3Document18 pagesModule 2 Chapter 3HarshaNo ratings yet
- Chapter 3Document48 pagesChapter 3Aman Ethio LijNo ratings yet
- RiSC PipelineDocument9 pagesRiSC Pipelinekb_lu232No ratings yet
- Introduction to ARMDocument24 pagesIntroduction to ARMSasi BhushanNo ratings yet
- Unit 3: Machine InstructionsDocument16 pagesUnit 3: Machine Instructionsshreya ChauhanNo ratings yet
- Unit 3Document55 pagesUnit 3ladukhushi09No ratings yet
- Assignment 4: Course Instructor / Lab EngineerDocument8 pagesAssignment 4: Course Instructor / Lab EngineerNitasha HumaNo ratings yet
- EE6008 Unit 5Document8 pagesEE6008 Unit 5TakeItEasyDude TIEDNo ratings yet
- Cad For Vlsi 2 Pro Ject - Superscalar Processor ImplementationDocument10 pagesCad For Vlsi 2 Pro Ject - Superscalar Processor ImplementationkbkkrNo ratings yet
- 2 16 1350130228 7. Flexible Wireless DataDocument6 pages2 16 1350130228 7. Flexible Wireless DataSumeet SauravNo ratings yet
- CPU ArchetictureDocument26 pagesCPU ArchetictureDarryl Dave DitucalanNo ratings yet
- CA Classes-106-110Document5 pagesCA Classes-106-110SrinivasaRaoNo ratings yet
- Instruction TablesDocument323 pagesInstruction TablestahlokoNo ratings yet
- Questions With AnswersDocument22 pagesQuestions With AnswersYuva SathiyamoorthyNo ratings yet
- Oral Question Bank With AnswersDocument14 pagesOral Question Bank With Answersसिद्धांत देशमुखेNo ratings yet
- Module 1 PT 2Document20 pagesModule 1 PT 2Shavane DavisNo ratings yet
- Input Unit: Five Basic Components of Computer SystemDocument9 pagesInput Unit: Five Basic Components of Computer SystemJefin PaulNo ratings yet
- # Tutorial 9 & 10Document6 pages# Tutorial 9 & 10aojiru.coNo ratings yet
- Design of 32-Bit Risc Cpu Based On Mips: Journal of Global Research in Computer ScienceDocument5 pagesDesign of 32-Bit Risc Cpu Based On Mips: Journal of Global Research in Computer ScienceAkanksha Dixit ManodhyaNo ratings yet
- Cpre 381 Processor Project 1Document20 pagesCpre 381 Processor Project 1api-272773251No ratings yet
- Classic RISC PipelineDocument10 pagesClassic RISC PipelineShantheri BhatNo ratings yet
- Unit 5-2 COADocument52 pagesUnit 5-2 COAmy storiesNo ratings yet
- Concept of Pipelining 3.1.3Document6 pagesConcept of Pipelining 3.1.3fovov27364No ratings yet
- Computer Architecture 16 MarksDocument28 pagesComputer Architecture 16 MarksBalachandar2000100% (1)
- Iat-4 McesDocument12 pagesIat-4 Mcesbhatt bhattNo ratings yet
- ES Assignment 3Document12 pagesES Assignment 3satinder singhNo ratings yet
- Advanced RISC Machine-ARM Notes BhurchandiDocument8 pagesAdvanced RISC Machine-ARM Notes BhurchandiVipin TiwariNo ratings yet
- Introduction To MIPS ArchitectureDocument10 pagesIntroduction To MIPS ArchitectureJahanzaib AwanNo ratings yet
- Svcet: 1. What Is MIPS, MIPS Instruction, MIPS ImplementationDocument24 pagesSvcet: 1. What Is MIPS, MIPS Instruction, MIPS ImplementationSamia MumuNo ratings yet
- Unit 2 CaoDocument8 pagesUnit 2 CaoZamal AhmedNo ratings yet
- COA Chapter 6Document6 pagesCOA Chapter 6Abebe GosuNo ratings yet
- Comp - Arch 2334Document4 pagesComp - Arch 2334praveenrangareNo ratings yet
- BC0046Document6 pagesBC0046Tusharr AhujaNo ratings yet
- System Software 2019Document17 pagesSystem Software 2019SudharshanNo ratings yet
- Lecture6 ARMDocument50 pagesLecture6 ARMRohith ThurlapatiNo ratings yet
- Instruction Set Architecture 24Document17 pagesInstruction Set Architecture 24dishatayshete93No ratings yet
- Session2 - Introduction To RISC and CISCDocument4 pagesSession2 - Introduction To RISC and CISCHillary MurungaNo ratings yet
- Superscalar and VLIW ArchitecturesDocument35 pagesSuperscalar and VLIW ArchitecturesNusrat Mary ChowdhuryNo ratings yet
- AssembyDocument57 pagesAssembyOmar KamilNo ratings yet
- SJB Institute of Technology: CO & ARM Microcontrollers (21EC52)Document61 pagesSJB Institute of Technology: CO & ARM Microcontrollers (21EC52)rohitrajww4No ratings yet
- Architecture of Computers Lab1Document28 pagesArchitecture of Computers Lab1q5nfvkbyyrNo ratings yet
- Instruction Set Architecture (ISA) NotesDocument12 pagesInstruction Set Architecture (ISA) NotesSaira GillaniNo ratings yet
- CA U3 Sjit PDFDocument95 pagesCA U3 Sjit PDFThe Smart Boy KungFuPawnNo ratings yet
- MIPS Report FileDocument17 pagesMIPS Report FileAayushiNo ratings yet
- MCSE-103 by Mohd AbdullahDocument9 pagesMCSE-103 by Mohd AbdullahabhayNo ratings yet
- Draw The Block Diagram of Simple Microprocessor-Based System and Explain The Function of Each Block (You Can Use MS Word or Google Docs)Document8 pagesDraw The Block Diagram of Simple Microprocessor-Based System and Explain The Function of Each Block (You Can Use MS Word or Google Docs)Riza Pahama MananaongNo ratings yet
- CS401 - Short Notes Chapter 1Document7 pagesCS401 - Short Notes Chapter 1aafiah100% (2)
- The Design of A RISC Architecture and Its Implementation With An FPGADocument24 pagesThe Design of A RISC Architecture and Its Implementation With An FPGASneha AngreNo ratings yet
- Unit-3 CoaDocument65 pagesUnit-3 CoatarunprovidesNo ratings yet
- Co Unit2 Part1Document11 pagesCo Unit2 Part1Manjushree N.SNo ratings yet
- Question With Answer MP & MCDocument13 pagesQuestion With Answer MP & MCMATHANKUMAR.SNo ratings yet
- Group 6 Cpu Design PresentationDocument50 pagesGroup 6 Cpu Design PresentationFerry AriNo ratings yet
- PIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byDocument7 pagesPIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byNeeraj KarnaniNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- 4CS015Week6CPUArchitecture 90180Document39 pages4CS015Week6CPUArchitecture 90180np03cs4a230235No ratings yet
- CS 532Document4 pagesCS 532Humaira ChNo ratings yet
- MX25L1006E, 3V, 1Mb, v1.4 PDFDocument51 pagesMX25L1006E, 3V, 1Mb, v1.4 PDFpanjoelsNo ratings yet
- A12x Bionic ChipDocument4 pagesA12x Bionic ChipAbhishek AggarwalNo ratings yet
- Manoj Gupta 26301620016 Microprocessor & MicrocontrollerDocument12 pagesManoj Gupta 26301620016 Microprocessor & MicrocontrollerAbhijit Misra AbhiNo ratings yet
- Question BankDocument48 pagesQuestion BankpriyaNo ratings yet
- The 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayDocument15 pagesThe 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayAkshwin KisoreNo ratings yet
- Gold in Processor ChipsDocument24 pagesGold in Processor ChipsAFLAC ............100% (9)
- ELEC212 Revision+Design+AssignmentDocument15 pagesELEC212 Revision+Design+Assignmentkhan aliNo ratings yet
- This Unit: Superscalar Execution: - Idea of Instruction-Level Parallelism - Superscalar Scaling IssuesDocument13 pagesThis Unit: Superscalar Execution: - Idea of Instruction-Level Parallelism - Superscalar Scaling Issuesg7812No ratings yet
- 10 8255 Ppi & 8254a PitDocument24 pages10 8255 Ppi & 8254a PitAlya CookNo ratings yet
- FUJITSUDocument26 pagesFUJITSUBudi MulyonoNo ratings yet
- Differences Between R10000 and R4400 R10000 R4400: Architecture Implementation Architecture ImplementationDocument6 pagesDifferences Between R10000 and R4400 R10000 R4400: Architecture Implementation Architecture ImplementationВиктор ПерепёлкинNo ratings yet
- Lab 5Document8 pagesLab 5Zunair NazirNo ratings yet
- 8,16,32 Floating Point Processing in ARMDocument25 pages8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- Lecture 01Document14 pagesLecture 01Colesha BarukaNo ratings yet
- Central Processing UnitDocument12 pagesCentral Processing Unithussain korirNo ratings yet
- Microprocessors Vs MicrocontrollersDocument40 pagesMicroprocessors Vs MicrocontrollersNgaa SiemensNo ratings yet
- Tutorial 3 2022 StudentsDocument5 pagesTutorial 3 2022 StudentsIndongo EliaserNo ratings yet
- 16F73Document12 pages16F73Aman MaanNo ratings yet
- STM32F302R8 Ref ManualDocument1,080 pagesSTM32F302R8 Ref ManualHassan AlviNo ratings yet
- MPMC Full NotesDocument202 pagesMPMC Full Notesanon_760026317No ratings yet
- Sample ThesisDocument12 pagesSample ThesisPioNo ratings yet
- Stm32g4 Memory Flash FlashDocument36 pagesStm32g4 Memory Flash FlashvagelismixNo ratings yet
- Computer-Architecture Hari Aryal IoeDocument163 pagesComputer-Architecture Hari Aryal IoeKe ShāvNo ratings yet
- CPU Bench MarkDocument16 pagesCPU Bench MarkwajahatNo ratings yet
- HP Compaq Consumer Price List-10th Aug'101Document5 pagesHP Compaq Consumer Price List-10th Aug'101ER RameshNo ratings yet
- PIC16F84A: TABLE 7-2: Pic16Cxxx Instruction SetDocument1 pagePIC16F84A: TABLE 7-2: Pic16Cxxx Instruction SetKev GamesNo ratings yet
- 8086 Interview QuestionsDocument3 pages8086 Interview Questionsrajesh5809No ratings yet
- NVIDIA P40 Supported ServersDocument13 pagesNVIDIA P40 Supported ServersGomishChawlaNo ratings yet

























































































Download as docx, pdf, or txt
You might also like
- HW Assignment 5Document3 pagesHW Assignment 5abdul basitNo ratings yet
- Implementation of A 16-Bit RISC Processor Using FPGA ProgrammingDocument25 pagesImplementation of A 16-Bit RISC Processor Using FPGA ProgrammingTejashree100% (3)
- Coa Unit - 5 NotesDocument6 pagesCoa Unit - 5 Notes1NT19IS077-MADHURI.CNo ratings yet
- Draw The Block Diagram of Von Neumann Architecture and Explain About Its Parts in Brief AnswerDocument7 pagesDraw The Block Diagram of Von Neumann Architecture and Explain About Its Parts in Brief AnswerhayerpaNo ratings yet
- UNIT-3: MIPS InstructionsDocument15 pagesUNIT-3: MIPS InstructionsMukeshram.B AIDS20No ratings yet
- Cyan 2800398239029h09fn0ivj0vcjb0Document16 pagesCyan 2800398239029h09fn0ivj0vcjb0Anonymous zWBss8LKNo ratings yet
- Module 2 Chapter 3Document18 pagesModule 2 Chapter 3HarshaNo ratings yet
- Chapter 3Document48 pagesChapter 3Aman Ethio LijNo ratings yet
- RiSC PipelineDocument9 pagesRiSC Pipelinekb_lu232No ratings yet
- Introduction to ARMDocument24 pagesIntroduction to ARMSasi BhushanNo ratings yet
- Unit 3: Machine InstructionsDocument16 pagesUnit 3: Machine Instructionsshreya ChauhanNo ratings yet
- Unit 3Document55 pagesUnit 3ladukhushi09No ratings yet
- Assignment 4: Course Instructor / Lab EngineerDocument8 pagesAssignment 4: Course Instructor / Lab EngineerNitasha HumaNo ratings yet
- EE6008 Unit 5Document8 pagesEE6008 Unit 5TakeItEasyDude TIEDNo ratings yet
- Cad For Vlsi 2 Pro Ject - Superscalar Processor ImplementationDocument10 pagesCad For Vlsi 2 Pro Ject - Superscalar Processor ImplementationkbkkrNo ratings yet
- 2 16 1350130228 7. Flexible Wireless DataDocument6 pages2 16 1350130228 7. Flexible Wireless DataSumeet SauravNo ratings yet
- CPU ArchetictureDocument26 pagesCPU ArchetictureDarryl Dave DitucalanNo ratings yet
- CA Classes-106-110Document5 pagesCA Classes-106-110SrinivasaRaoNo ratings yet
- Instruction TablesDocument323 pagesInstruction TablestahlokoNo ratings yet
- Questions With AnswersDocument22 pagesQuestions With AnswersYuva SathiyamoorthyNo ratings yet
- Oral Question Bank With AnswersDocument14 pagesOral Question Bank With Answersसिद्धांत देशमुखेNo ratings yet
- Module 1 PT 2Document20 pagesModule 1 PT 2Shavane DavisNo ratings yet
- Input Unit: Five Basic Components of Computer SystemDocument9 pagesInput Unit: Five Basic Components of Computer SystemJefin PaulNo ratings yet
- # Tutorial 9 & 10Document6 pages# Tutorial 9 & 10aojiru.coNo ratings yet
- Design of 32-Bit Risc Cpu Based On Mips: Journal of Global Research in Computer ScienceDocument5 pagesDesign of 32-Bit Risc Cpu Based On Mips: Journal of Global Research in Computer ScienceAkanksha Dixit ManodhyaNo ratings yet
- Cpre 381 Processor Project 1Document20 pagesCpre 381 Processor Project 1api-272773251No ratings yet
- Classic RISC PipelineDocument10 pagesClassic RISC PipelineShantheri BhatNo ratings yet
- Unit 5-2 COADocument52 pagesUnit 5-2 COAmy storiesNo ratings yet
- Concept of Pipelining 3.1.3Document6 pagesConcept of Pipelining 3.1.3fovov27364No ratings yet
- Computer Architecture 16 MarksDocument28 pagesComputer Architecture 16 MarksBalachandar2000100% (1)
- Iat-4 McesDocument12 pagesIat-4 Mcesbhatt bhattNo ratings yet
- ES Assignment 3Document12 pagesES Assignment 3satinder singhNo ratings yet
- Advanced RISC Machine-ARM Notes BhurchandiDocument8 pagesAdvanced RISC Machine-ARM Notes BhurchandiVipin TiwariNo ratings yet
- Introduction To MIPS ArchitectureDocument10 pagesIntroduction To MIPS ArchitectureJahanzaib AwanNo ratings yet
- Svcet: 1. What Is MIPS, MIPS Instruction, MIPS ImplementationDocument24 pagesSvcet: 1. What Is MIPS, MIPS Instruction, MIPS ImplementationSamia MumuNo ratings yet
- Unit 2 CaoDocument8 pagesUnit 2 CaoZamal AhmedNo ratings yet
- COA Chapter 6Document6 pagesCOA Chapter 6Abebe GosuNo ratings yet
- Comp - Arch 2334Document4 pagesComp - Arch 2334praveenrangareNo ratings yet
- BC0046Document6 pagesBC0046Tusharr AhujaNo ratings yet
- System Software 2019Document17 pagesSystem Software 2019SudharshanNo ratings yet
- Lecture6 ARMDocument50 pagesLecture6 ARMRohith ThurlapatiNo ratings yet
- Instruction Set Architecture 24Document17 pagesInstruction Set Architecture 24dishatayshete93No ratings yet
- Session2 - Introduction To RISC and CISCDocument4 pagesSession2 - Introduction To RISC and CISCHillary MurungaNo ratings yet
- Superscalar and VLIW ArchitecturesDocument35 pagesSuperscalar and VLIW ArchitecturesNusrat Mary ChowdhuryNo ratings yet
- AssembyDocument57 pagesAssembyOmar KamilNo ratings yet
- SJB Institute of Technology: CO & ARM Microcontrollers (21EC52)Document61 pagesSJB Institute of Technology: CO & ARM Microcontrollers (21EC52)rohitrajww4No ratings yet
- Architecture of Computers Lab1Document28 pagesArchitecture of Computers Lab1q5nfvkbyyrNo ratings yet
- Instruction Set Architecture (ISA) NotesDocument12 pagesInstruction Set Architecture (ISA) NotesSaira GillaniNo ratings yet
- CA U3 Sjit PDFDocument95 pagesCA U3 Sjit PDFThe Smart Boy KungFuPawnNo ratings yet
- MIPS Report FileDocument17 pagesMIPS Report FileAayushiNo ratings yet
- MCSE-103 by Mohd AbdullahDocument9 pagesMCSE-103 by Mohd AbdullahabhayNo ratings yet
- Draw The Block Diagram of Simple Microprocessor-Based System and Explain The Function of Each Block (You Can Use MS Word or Google Docs)Document8 pagesDraw The Block Diagram of Simple Microprocessor-Based System and Explain The Function of Each Block (You Can Use MS Word or Google Docs)Riza Pahama MananaongNo ratings yet
- CS401 - Short Notes Chapter 1Document7 pagesCS401 - Short Notes Chapter 1aafiah100% (2)
- The Design of A RISC Architecture and Its Implementation With An FPGADocument24 pagesThe Design of A RISC Architecture and Its Implementation With An FPGASneha AngreNo ratings yet
- Unit-3 CoaDocument65 pagesUnit-3 CoatarunprovidesNo ratings yet
- Co Unit2 Part1Document11 pagesCo Unit2 Part1Manjushree N.SNo ratings yet
- Question With Answer MP & MCDocument13 pagesQuestion With Answer MP & MCMATHANKUMAR.SNo ratings yet
- Group 6 Cpu Design PresentationDocument50 pagesGroup 6 Cpu Design PresentationFerry AriNo ratings yet
- PIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byDocument7 pagesPIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byNeeraj KarnaniNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- 4CS015Week6CPUArchitecture 90180Document39 pages4CS015Week6CPUArchitecture 90180np03cs4a230235No ratings yet
- CS 532Document4 pagesCS 532Humaira ChNo ratings yet
- MX25L1006E, 3V, 1Mb, v1.4 PDFDocument51 pagesMX25L1006E, 3V, 1Mb, v1.4 PDFpanjoelsNo ratings yet
- A12x Bionic ChipDocument4 pagesA12x Bionic ChipAbhishek AggarwalNo ratings yet
- Manoj Gupta 26301620016 Microprocessor & MicrocontrollerDocument12 pagesManoj Gupta 26301620016 Microprocessor & MicrocontrollerAbhijit Misra AbhiNo ratings yet
- Question BankDocument48 pagesQuestion BankpriyaNo ratings yet
- The 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayDocument15 pagesThe 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayAkshwin KisoreNo ratings yet
- Gold in Processor ChipsDocument24 pagesGold in Processor ChipsAFLAC ............100% (9)
- ELEC212 Revision+Design+AssignmentDocument15 pagesELEC212 Revision+Design+Assignmentkhan aliNo ratings yet
- This Unit: Superscalar Execution: - Idea of Instruction-Level Parallelism - Superscalar Scaling IssuesDocument13 pagesThis Unit: Superscalar Execution: - Idea of Instruction-Level Parallelism - Superscalar Scaling Issuesg7812No ratings yet
- 10 8255 Ppi & 8254a PitDocument24 pages10 8255 Ppi & 8254a PitAlya CookNo ratings yet
- FUJITSUDocument26 pagesFUJITSUBudi MulyonoNo ratings yet
- Differences Between R10000 and R4400 R10000 R4400: Architecture Implementation Architecture ImplementationDocument6 pagesDifferences Between R10000 and R4400 R10000 R4400: Architecture Implementation Architecture ImplementationВиктор ПерепёлкинNo ratings yet
- Lab 5Document8 pagesLab 5Zunair NazirNo ratings yet
- 8,16,32 Floating Point Processing in ARMDocument25 pages8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- Lecture 01Document14 pagesLecture 01Colesha BarukaNo ratings yet
- Central Processing UnitDocument12 pagesCentral Processing Unithussain korirNo ratings yet
- Microprocessors Vs MicrocontrollersDocument40 pagesMicroprocessors Vs MicrocontrollersNgaa SiemensNo ratings yet
- Tutorial 3 2022 StudentsDocument5 pagesTutorial 3 2022 StudentsIndongo EliaserNo ratings yet
- 16F73Document12 pages16F73Aman MaanNo ratings yet
- STM32F302R8 Ref ManualDocument1,080 pagesSTM32F302R8 Ref ManualHassan AlviNo ratings yet
- MPMC Full NotesDocument202 pagesMPMC Full Notesanon_760026317No ratings yet
- Sample ThesisDocument12 pagesSample ThesisPioNo ratings yet
- Stm32g4 Memory Flash FlashDocument36 pagesStm32g4 Memory Flash FlashvagelismixNo ratings yet
- Computer-Architecture Hari Aryal IoeDocument163 pagesComputer-Architecture Hari Aryal IoeKe ShāvNo ratings yet
- CPU Bench MarkDocument16 pagesCPU Bench MarkwajahatNo ratings yet
- HP Compaq Consumer Price List-10th Aug'101Document5 pagesHP Compaq Consumer Price List-10th Aug'101ER RameshNo ratings yet
- PIC16F84A: TABLE 7-2: Pic16Cxxx Instruction SetDocument1 pagePIC16F84A: TABLE 7-2: Pic16Cxxx Instruction SetKev GamesNo ratings yet
- 8086 Interview QuestionsDocument3 pages8086 Interview Questionsrajesh5809No ratings yet
- NVIDIA P40 Supported ServersDocument13 pagesNVIDIA P40 Supported ServersGomishChawlaNo ratings yet