Download as doc, pdf, or txt
You might also like
- Radwin Training Catalog v3.1Document19 pagesRadwin Training Catalog v3.1testNo ratings yet
- 1.1 Description: Detection of Plant Leaf Diseases Using Image Segmentation and Soft Computing TechniquesDocument26 pages1.1 Description: Detection of Plant Leaf Diseases Using Image Segmentation and Soft Computing TechniquesChandan BkNo ratings yet
- BBC Digital Media Initiative SummaryDocument9 pagesBBC Digital Media Initiative SummarywimjamNo ratings yet
- FlowCon Catalogue 06.2013Document214 pagesFlowCon Catalogue 06.2013steventcchanNo ratings yet
- 2014 Nissan Juke 47748 PDFDocument349 pages2014 Nissan Juke 47748 PDFhidraulic100% (1)
- Api 574Document3 pagesApi 574kirubha_karan200033% (3)
- Advancement in Patient Monitoring SystemDocument23 pagesAdvancement in Patient Monitoring SystemNawaz Sherif NNo ratings yet
- 190A1E0336 - ProjectDocument67 pages190A1E0336 - ProjectSrisasthagnaneswarsaikumar KonduruNo ratings yet
- IoT Based Biometric Voting SystemDocument12 pagesIoT Based Biometric Voting SystemNgezeNo ratings yet
- Vehical Starting System Using Finger PrintDocument18 pagesVehical Starting System Using Finger PrintVIKASH SINGHNo ratings yet
- Online Crime Management System: Sri Ramakrishna College of Arts and ScienceDocument34 pagesOnline Crime Management System: Sri Ramakrishna College of Arts and ScienceSanseedha NNo ratings yet
- MDAZMATHULLA 4JN16MCA24 Modified1 PDFDocument42 pagesMDAZMATHULLA 4JN16MCA24 Modified1 PDFRaghavendra DNo ratings yet
- Face Biometric Authentication System For ATM Using Deep LearningDocument10 pagesFace Biometric Authentication System For ATM Using Deep LearningIJRASETPublicationsNo ratings yet
- Speech Recognition ReportDocument20 pagesSpeech Recognition ReportRamesh k100% (1)
- Vegetable Tracing Using IOTDocument64 pagesVegetable Tracing Using IOTSampath TNo ratings yet
- Hotel Booking SystemDocument6 pagesHotel Booking SystemProbir Aich100% (1)
- Advanced Voting Machine Using Face RecognitionDocument25 pagesAdvanced Voting Machine Using Face Recognitionritu OfficialNo ratings yet
- Report On PC To PC Laser CommunicationDocument20 pagesReport On PC To PC Laser CommunicationRajashri BhamareNo ratings yet
- Network Intrusion Detection SystemDocument46 pagesNetwork Intrusion Detection Systemsachin mohanNo ratings yet
- Voice Response SystemDocument74 pagesVoice Response SystemSnigdha Mohanty0% (1)
- Devikarani V S (4ub16ei016) SeminarDocument30 pagesDevikarani V S (4ub16ei016) SeminarNagaveniNo ratings yet
- Semi Supervised Machine Learning Approach For DDOS DetectionDocument6 pagesSemi Supervised Machine Learning Approach For DDOS DetectionTunnu SunnyNo ratings yet
- SHUBHAM KUMAR TIWARI - Finalprojectreport - Shubham TiwariDocument81 pagesSHUBHAM KUMAR TIWARI - Finalprojectreport - Shubham TiwariRithyasri PalsaniNo ratings yet
- Smart Irrigation System Using CloudDocument4 pagesSmart Irrigation System Using CloudInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Black Box TestingDocument13 pagesBlack Box TestingeinsteinuNo ratings yet
- Women Safety Device Using GPS and GSM ModemDocument3 pagesWomen Safety Device Using GPS and GSM ModemAnonymous izrFWiQ100% (1)
- Voice Based Email System Application For Blind and Visually Impaired PeoplesDocument3 pagesVoice Based Email System Application For Blind and Visually Impaired PeoplesE JanviNo ratings yet
- Block Design-Based Key Agreement For Group Data Sharing in Cloud ComputingDocument24 pagesBlock Design-Based Key Agreement For Group Data Sharing in Cloud Computingvaishali sarkateNo ratings yet
- Title:-Iot Based Health Monitoring System Using Raspberry PiDocument28 pagesTitle:-Iot Based Health Monitoring System Using Raspberry PiGagan DeepNo ratings yet
- Digital Watermarking System Project ReportDocument51 pagesDigital Watermarking System Project ReportPavan GattaNo ratings yet
- InternshipDocument17 pagesInternshipbhavanaNo ratings yet
- MCA Project Report Format - MU - UpdatedDocument20 pagesMCA Project Report Format - MU - Updatedromi Kushwaha100% (1)
- Chapter-1: 1.1 Aims and Objectives AimsDocument59 pagesChapter-1: 1.1 Aims and Objectives AimsPurushothampushu2008 ReddyNo ratings yet
- Artificial PassengerDocument25 pagesArtificial PassengerVishith Reddy MarpadgaNo ratings yet
- Patient Monitoring System Using GSM For Hospitals and Old Age HomesDocument5 pagesPatient Monitoring System Using GSM For Hospitals and Old Age Homesvgmanjunatha100% (1)
- 03 Literature ReviewDocument8 pages03 Literature ReviewDonika MarkandeNo ratings yet
- Face Recogniton For Attendance SystemDocument114 pagesFace Recogniton For Attendance Systemalbinjamestpra100% (1)
- Project Title:: Fingerprint Voting System For UniversityDocument8 pagesProject Title:: Fingerprint Voting System For UniversityMunshiNo ratings yet
- Mobile Value Added Services 2012: IndiaDocument12 pagesMobile Value Added Services 2012: IndiaNishant SinghNo ratings yet
- Report On VAS Feasibility in Rural IndiaDocument61 pagesReport On VAS Feasibility in Rural IndiaGaurav SaxenaNo ratings yet
- Hand Gesture To Speech TranslationDocument37 pagesHand Gesture To Speech TranslationRohan SNo ratings yet
- Finger Print Vehicle StarterDocument3 pagesFinger Print Vehicle StarterTECHer YTNo ratings yet
- Currency Counting Machine With Fake Note DetectionDocument19 pagesCurrency Counting Machine With Fake Note DetectionUtkarsh Agrawal100% (6)
- Biometrics PPT FinalDocument19 pagesBiometrics PPT FinalRama SudhaNo ratings yet
- Report Final Biometrics by HimanshuDocument30 pagesReport Final Biometrics by HimanshuAyushNo ratings yet
- INREPORT2Document34 pagesINREPORT2Supriya PeerapurNo ratings yet
- Seminar ReportDocument17 pagesSeminar Reportkcn entertainerNo ratings yet
- Electronic Voating MachineDocument10 pagesElectronic Voating MachinerishabhNo ratings yet
- Automatic Attendance Management System Using Face Recognition PDFDocument5 pagesAutomatic Attendance Management System Using Face Recognition PDFJDNET TECHNOLOGIESNo ratings yet
- Any Time Medicine ReportDocument34 pagesAny Time Medicine Reportsupreetha100% (1)
- Capstone ProjectDocument61 pagesCapstone ProjectJayvee MagnayeNo ratings yet
- Human Hand Gestures Capturing and Recognition Via CameraDocument64 pagesHuman Hand Gestures Capturing and Recognition Via CameraBharathNo ratings yet
- Final Report On Facial Emotion Detection Using Machine LearningDocument12 pagesFinal Report On Facial Emotion Detection Using Machine LearningPriyanshu AutumnNo ratings yet
- Deep Representation Based Feature Extraction and Recovering For Finger-Vein Veri CationDocument15 pagesDeep Representation Based Feature Extraction and Recovering For Finger-Vein Veri CationRanjith M100% (1)
- Design and Implementation of Computerized Child Abuse Database Management SystemDocument71 pagesDesign and Implementation of Computerized Child Abuse Database Management SystemEmmanuel NnamNo ratings yet
- Smart Shopping Trolley With Automated Billing Using ArduinoDocument3 pagesSmart Shopping Trolley With Automated Billing Using ArduinoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Virtual Mouse Control Using Hand Class Gesture: Bachelor of Engineering Electronics and TelecommunicationDocument34 pagesVirtual Mouse Control Using Hand Class Gesture: Bachelor of Engineering Electronics and TelecommunicationGaurav MunjewarNo ratings yet
- Online Polling Sytem Project ReportDocument43 pagesOnline Polling Sytem Project ReportShailesh Prajapati100% (1)
- Self Learning and Efficient Health Status Analysis For A Core Router SystemDocument35 pagesSelf Learning and Efficient Health Status Analysis For A Core Router SystemSai Teja deevelaNo ratings yet
- Virtual Mirror - A Hassle Free Approach To The Use of Trial RoomDocument38 pagesVirtual Mirror - A Hassle Free Approach To The Use of Trial RoomtariqNo ratings yet
- PR3200 - FakeNewsClassification - Report - BHARATH RDocument46 pagesPR3200 - FakeNewsClassification - Report - BHARATH RAnagha SLNo ratings yet
- A Summer Training Report On Chat MassengerDocument62 pagesA Summer Training Report On Chat MassengerAkshayNo ratings yet
- First 4 Page A CONSTANT FREQUENCY ZVS CONTROL SYSTEMDocument9 pagesFirst 4 Page A CONSTANT FREQUENCY ZVS CONTROL SYSTEMvinayakaNo ratings yet
- An Early Detection System For Proactive Management of Raw Milk QualityDocument1 pageAn Early Detection System For Proactive Management of Raw Milk QualityvinayakaNo ratings yet
- Smog Eating ConcreteDocument12 pagesSmog Eating ConcretevinayakaNo ratings yet
- Fuel Cell Using Electrical VehicleDocument13 pagesFuel Cell Using Electrical VehiclevinayakaNo ratings yet
- Privacy-Preserving and Truthful DetectionDocument1 pagePrivacy-Preserving and Truthful DetectionvinayakaNo ratings yet
- Advanced Smart Card Based Digital Energy Meter Using Atmel MicrocontrollerDocument99 pagesAdvanced Smart Card Based Digital Energy Meter Using Atmel MicrocontrollervinayakaNo ratings yet
- Sajadi 2018Document9 pagesSajadi 2018vinayakaNo ratings yet
- Installing Windows Mobile 6.0 Root Certificates - Confused AmusedDocument9 pagesInstalling Windows Mobile 6.0 Root Certificates - Confused AmusedJuan MendozaNo ratings yet
- Whats New TANK 2019Document5 pagesWhats New TANK 2019kuselanmlNo ratings yet
- QUEST® Parts List PDFDocument332 pagesQUEST® Parts List PDFMontserrat Gu100% (1)
- PDFDocument2 pagesPDFrubenpatNo ratings yet
- Boeing 737 Next GenerationDocument20 pagesBoeing 737 Next GenerationLoh Jian Cheng75% (4)
- PIM International Vol 7 No 2 June 2013 SPDocument84 pagesPIM International Vol 7 No 2 June 2013 SPjoaopedrosousaNo ratings yet
- Vane Motor High Performance Hydraulic Series M5B - M5BS - M5BFDocument11 pagesVane Motor High Performance Hydraulic Series M5B - M5BS - M5BFElias80No ratings yet
- Enhanced Ground Proximity Warning Systeme GPWS Rev eDocument95 pagesEnhanced Ground Proximity Warning Systeme GPWS Rev eSajjad Ghani100% (2)
- Segu Info Familia Iso 27000Document4 pagesSegu Info Familia Iso 27000RobertoNo ratings yet
- Emco AvrDocument18 pagesEmco Avrvaish20No ratings yet
- 4 Commencement Exercises & 6 Completion Rites (Script) : Cybergraduation of Signal Village National High SchoolDocument9 pages4 Commencement Exercises & 6 Completion Rites (Script) : Cybergraduation of Signal Village National High Schoolcombos comboNo ratings yet
- Candy Co107f 37sDocument20 pagesCandy Co107f 37sPavle RadojkovićNo ratings yet
- BDO CC REquirementsDocument21 pagesBDO CC REquirementsEdzmarie LaranjoNo ratings yet
- BMW Group Investor Presentation PDFDocument47 pagesBMW Group Investor Presentation PDFendy walterNo ratings yet
- D41e-6 Kepb002801Document410 pagesD41e-6 Kepb002801JeffersonDiasNo ratings yet
- Venkat ResumeDocument3 pagesVenkat Resumechanti1559No ratings yet
- Higer PeopleDocument64 pagesHiger PeoplemivanoNo ratings yet
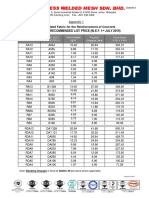
- Steel Welded Fabric List Price (SG) - V2.00Document2 pagesSteel Welded Fabric List Price (SG) - V2.00biik0076153No ratings yet
- Pump SPI PDFDocument4 pagesPump SPI PDFRaghNo ratings yet
- Microwave Engineering: David M. PozarDocument10 pagesMicrowave Engineering: David M. PozarNguyen HungNo ratings yet
- Service Manual: A610/A611 SERDocument218 pagesService Manual: A610/A611 SERFranklin GutierrezNo ratings yet
- A545 730 16 50 02051 - Rev 2Document2 pagesA545 730 16 50 02051 - Rev 2csathishssnNo ratings yet
- PCB Manufacturing ProcessDocument15 pagesPCB Manufacturing ProcessLuiejen GasconNo ratings yet
- ICx2272 Substation GatewayDocument6 pagesICx2272 Substation GatewaybirinderNo ratings yet
- LPSupplementDocument7 pagesLPSupplementAnshul SahniNo ratings yet