Download as pdf or txt
You might also like
- Solution Manual For Signals and Systems Using Matlab 3rd by ChaparroDocument38 pagesSolution Manual For Signals and Systems Using Matlab 3rd by Chaparroandrotomyboationv7fsf100% (28)
- (Howard Anton, Chris Rorres) Elementary Linear Alg (11th)Document1 page(Howard Anton, Chris Rorres) Elementary Linear Alg (11th)Mathematical ContestsNo ratings yet
- (Howard - Anton, - Chris - Rorres) - Elementary - Linear - Alg (11th) 274 PDFDocument1 page(Howard - Anton, - Chris - Rorres) - Elementary - Linear - Alg (11th) 274 PDFRubens Vilhena FonsecaNo ratings yet
- (Howard Anton, Chris Rorres) Elementary LinearDocument1 page(Howard Anton, Chris Rorres) Elementary LinearMathematical ContestsNo ratings yet
- Unit 1 Advanced Control TheoryDocument17 pagesUnit 1 Advanced Control TheoryMuskan AgarwalNo ratings yet
- Matrices and Linear Transformations: 1. Mappings Between Sets A Ax B Function Domain Codomain Image Inverse Image ofDocument4 pagesMatrices and Linear Transformations: 1. Mappings Between Sets A Ax B Function Domain Codomain Image Inverse Image ofUp ToyouNo ratings yet
- Chapter 6Document48 pagesChapter 6Cristian LopezNo ratings yet
- Chap1 PDFDocument25 pagesChap1 PDFDyl NicollNo ratings yet
- Systems of Linear Equations: 1 Matrix FunctionsDocument12 pagesSystems of Linear Equations: 1 Matrix FunctionsSeow Khaiwen KhaiwenNo ratings yet
- MA 102 (Ordinary Differential Equations)Document1 pageMA 102 (Ordinary Differential Equations)SHUBHAMNo ratings yet
- Systems of First Order Differential Equations: Department of Mathematics IIT Guwahati Shb/SuDocument16 pagesSystems of First Order Differential Equations: Department of Mathematics IIT Guwahati Shb/SuakshayNo ratings yet
- State Space RepresentationDocument19 pagesState Space Representationjiraya chiNo ratings yet
- Stability and Boundedness in Nonlinear and Neutral Difference Equations Using New Variation of Parameters Formula and Fixed Point TheoryDocument23 pagesStability and Boundedness in Nonlinear and Neutral Difference Equations Using New Variation of Parameters Formula and Fixed Point TheoryMariana BayonaNo ratings yet
- Quiz ConvolutionDocument5 pagesQuiz ConvolutionGeorge KaragiannidisNo ratings yet
- Systems of First Order Differential Equations: Department of Mathematics IIT GuwahatiDocument18 pagesSystems of First Order Differential Equations: Department of Mathematics IIT GuwahatiAwais Mehmood BhattiNo ratings yet
- Table Properties LTDocument1 pageTable Properties LTxdbenerobeNo ratings yet
- Control 11 4 PDFDocument16 pagesControl 11 4 PDFMais SarayraNo ratings yet
- Lesson 6: State Transition MatrixDocument29 pagesLesson 6: State Transition MatrixSśēmǾǿ ŔämáďañNo ratings yet
- Week 12Document15 pagesWeek 12Vu Quoc TrungNo ratings yet
- Lecture 713 PDFDocument6 pagesLecture 713 PDFtayeNo ratings yet
- Lecture 39Document11 pagesLecture 39SowmyaNo ratings yet
- Geometry: Change of AxesDocument16 pagesGeometry: Change of AxesSilvaSunnyNo ratings yet
- Lesson 5: First Order Linear Differential Equations: William Mccallum 6 September 2005Document4 pagesLesson 5: First Order Linear Differential Equations: William Mccallum 6 September 2005RaymondNo ratings yet
- CS1 NotesDocument27 pagesCS1 NoteswallhumedxxNo ratings yet
- Matsysbok - Ps PagesDocument5 pagesMatsysbok - Ps PagesMouliNo ratings yet
- PDF Solution Manual For Signals and Systems Using Matlab 3Rd by Chaparro Online Ebook Full ChapterDocument74 pagesPDF Solution Manual For Signals and Systems Using Matlab 3Rd by Chaparro Online Ebook Full Chapterronald.martinez745100% (5)
- 2302 MTL102 ODE PartDocument63 pages2302 MTL102 ODE PartAYUSH SINGHNo ratings yet
- Lectures 1-6Document21 pagesLectures 1-6Ravinder KuhadNo ratings yet
- sns 2021 중간 (온라인)Document2 pagessns 2021 중간 (온라인)juyeons0204No ratings yet
- Mid Term Solutions PDFDocument2 pagesMid Term Solutions PDFMd Nur-A-Adam DonyNo ratings yet
- 2021 - w3 Math FoundationDocument24 pages2021 - w3 Math FoundationM. AnggaNo ratings yet
- Solution of The State EquationDocument6 pagesSolution of The State EquationJames KabugoNo ratings yet
- Oscillations of A Hanging Chain: Math 3410, Spring Semester 2018Document5 pagesOscillations of A Hanging Chain: Math 3410, Spring Semester 2018Esteban BellizziaNo ratings yet
- Taper Rod FEM LongDocument25 pagesTaper Rod FEM LonglapuNo ratings yet
- Signals and SystemsDocument9 pagesSignals and SystemsKrishna MishraNo ratings yet
- Tutorial 8 So LnsDocument3 pagesTutorial 8 So Lnspankaj100% (1)
- Multiple Random ProcessesDocument2 pagesMultiple Random ProcesseshemavarshitaNo ratings yet
- 8.2 Convolución GráficaDocument42 pages8.2 Convolución GráficaAlvaro Pardo SandovalNo ratings yet
- Lecture 2 Linear First-Order PDEs PDFDocument7 pagesLecture 2 Linear First-Order PDEs PDFSrinivas JangiliNo ratings yet
- From The Numerical Solution To The Symbolic Form.Document10 pagesFrom The Numerical Solution To The Symbolic Form.Erno ScheiberNo ratings yet
- Yates' Chapter 6, 10: Stochastic Processes & Stochastic FilteringDocument16 pagesYates' Chapter 6, 10: Stochastic Processes & Stochastic FilteringMohamed Ziad AlezzoNo ratings yet
- Stat2602b Topic 1Document27 pagesStat2602b Topic 1wingszet24No ratings yet
- Tutorial 1Document3 pagesTutorial 1shivendra.singh.vermaNo ratings yet
- System of First Order Differential EquationsDocument24 pagesSystem of First Order Differential EquationsKaniel OutisNo ratings yet
- Matrix of Linear Transform Es PDFDocument5 pagesMatrix of Linear Transform Es PDFEntretuymilmares AragonNo ratings yet
- ECE 313 Sp24 HW10Document8 pagesECE 313 Sp24 HW10Duna areny molneNo ratings yet
- Systems of Dierential EquationsDocument10 pagesSystems of Dierential EquationsNand SinghNo ratings yet
- Averaging: Theory, Definition and IssuesDocument8 pagesAveraging: Theory, Definition and IssuesMadushanka SugathNo ratings yet
- Neural NetworkDocument6 pagesNeural NetworkToshinari TongNo ratings yet
- Unit1 PDFDocument72 pagesUnit1 PDFRiddhijit ChattopadhyayNo ratings yet
- Lec 1-2Document8 pagesLec 1-2Ravinder KuhadNo ratings yet
- Dr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielDocument4 pagesDr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielkevweNo ratings yet
- SollDocument3 pagesSollGautham ShankarNo ratings yet
- Module3-Signals and SystemsDocument28 pagesModule3-Signals and SystemsAkul PaiNo ratings yet
- Oscillations of A Hanging Chain: Math 3510, Fall Semester 2019Document5 pagesOscillations of A Hanging Chain: Math 3510, Fall Semester 2019Kirti SaharanNo ratings yet
- Finalchapter4part4 Pde EllipticDocument39 pagesFinalchapter4part4 Pde Ellipticmeenhaz7096No ratings yet
- Lecture 8. Linear Systems of Differential EquationsDocument4 pagesLecture 8. Linear Systems of Differential EquationsChernet TugeNo ratings yet
- Exercises in Statistics Series A, No. 5: XT XTDocument3 pagesExercises in Statistics Series A, No. 5: XT XTnorman camarenaNo ratings yet
- Two-Dimensional Inverse Boundary Value Problem ForDocument17 pagesTwo-Dimensional Inverse Boundary Value Problem ForalissiachantoutNo ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Regra Da Cadeia DiversõesDocument1 pageRegra Da Cadeia DiversõesRubens Vilhena FonsecaNo ratings yet
- Integrais IndefinidasDocument9 pagesIntegrais IndefinidasRubens Vilhena FonsecaNo ratings yet
- The Enchanting Arithmetic - R. Sridharan - Z Lib - OrgDocument203 pagesThe Enchanting Arithmetic - R. Sridharan - Z Lib - OrgRubens Vilhena FonsecaNo ratings yet
- DiedralDocument8 pagesDiedralRubens Vilhena FonsecaNo ratings yet
- Derivadas para RecordarDocument8 pagesDerivadas para RecordarRubens Vilhena FonsecaNo ratings yet
- Divisibility ReviewDocument32 pagesDivisibility ReviewRubens Vilhena FonsecaNo ratings yet
- Integer Factorization Algorithms: Connelly BarnesDocument17 pagesInteger Factorization Algorithms: Connelly BarnesRubens Vilhena FonsecaNo ratings yet
- ResnickDocument1 pageResnickRubens Vilhena FonsecaNo ratings yet
- The Isomorphism Classes of Abelian GroupsDocument1 pageThe Isomorphism Classes of Abelian GroupsRubens Vilhena FonsecaNo ratings yet
- ResnickDocument1 pageResnickRubens Vilhena FonsecaNo ratings yet
- (Albert A. Cuoco, Frances R. Curcio) The Roles ofDocument1 page(Albert A. Cuoco, Frances R. Curcio) The Roles ofRubens Vilhena FonsecaNo ratings yet
- Elementary LinearDocument1 pageElementary LinearRubens Vilhena FonsecaNo ratings yet
- (Howard - Anton, - Chris - Rorres) - Elementary - Linear - Alg (11th) 274 PDFDocument1 page(Howard - Anton, - Chris - Rorres) - Elementary - Linear - Alg (11th) 274 PDFRubens Vilhena FonsecaNo ratings yet
- ModuleDocument2 pagesModuleAlpha Mae DitanNo ratings yet
- Algorismus of "Hauksbók" An Old Norse Text of 1310 On Hindu-Arabic Numeration and CalculationDocument7 pagesAlgorismus of "Hauksbók" An Old Norse Text of 1310 On Hindu-Arabic Numeration and CalculationfyyyNo ratings yet
- Ai Practical File 2023Document31 pagesAi Practical File 202333 Siddhant JainNo ratings yet
- IOQM 2020 21 - (Answers & Solutions) Part ADocument5 pagesIOQM 2020 21 - (Answers & Solutions) Part Aitsarshad30No ratings yet
- Characteristic Classes in Borel CohomologyDocument3 pagesCharacteristic Classes in Borel CohomologyEpic WinNo ratings yet
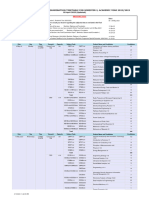
- 05 April 2023 - Putrajaya Campus Final Examination Schedule Semester 2 2022 - 2023Document7 pages05 April 2023 - Putrajaya Campus Final Examination Schedule Semester 2 2022 - 2023LOGESHWARAN SOUNDRARAJANNo ratings yet
- Statistics and ProbabilityDocument21 pagesStatistics and ProbabilityKIRIL EytiNo ratings yet
- Q1 Week1 Mathematics10 Learning-MaterialsDocument23 pagesQ1 Week1 Mathematics10 Learning-MaterialsJomari GolinNo ratings yet
- Jurnal Multivariate Normal Test PDFDocument23 pagesJurnal Multivariate Normal Test PDFNurlita Kusuma DewiNo ratings yet
- Partial and Multiple Correaltion PDFDocument21 pagesPartial and Multiple Correaltion PDFNavneet KaurNo ratings yet
- Grade 5 Cycle Test March 2023Document6 pagesGrade 5 Cycle Test March 2023wamulumeleahNo ratings yet
- Sequences and SeriesDocument40 pagesSequences and SeriesExtra Marks100% (2)
- GD&T Symbols and Guidelines Cheat SheetDocument1 pageGD&T Symbols and Guidelines Cheat SheetViraj Shirole100% (1)
- MAT 100: Spring 2018: Department of Physical SciencesDocument6 pagesMAT 100: Spring 2018: Department of Physical SciencesZarin ChowdhuryNo ratings yet
- Flat NotesDocument110 pagesFlat NotesAchintyaNo ratings yet
- 11.2 WorksheetDocument4 pages11.2 WorksheetDuddy EffNo ratings yet
- Trigonometry Past Year Questions On Addition Formulae 1Document7 pagesTrigonometry Past Year Questions On Addition Formulae 1Cgzam ZamNo ratings yet
- VisionIAS Quick Revision Material December 2024 Modern Indian HistoryDocument176 pagesVisionIAS Quick Revision Material December 2024 Modern Indian Historyharmeet.singh.hondaNo ratings yet
- Math9 Quarter1 Module3 FINAL-V3-1Document13 pagesMath9 Quarter1 Module3 FINAL-V3-1James Denzyl Gadiana100% (3)
- Detailed Lesson Plan Day2Document4 pagesDetailed Lesson Plan Day2Abegail VillanuevaNo ratings yet
- Grade 10 Polynomials: Answer The QuestionsDocument2 pagesGrade 10 Polynomials: Answer The QuestionsGreg AlvarezNo ratings yet
- L No 02 PDFDocument21 pagesL No 02 PDFabhijit2009100% (1)
- CH - 4 Vector Calculus StudentDocument6 pagesCH - 4 Vector Calculus StudentSae RoyiNo ratings yet
- Solutions To Ch.1-4 of Rings of Continuous Functions by L. Gillman and M. JerisonDocument101 pagesSolutions To Ch.1-4 of Rings of Continuous Functions by L. Gillman and M. Jerisonanon_45647590100% (4)
- The Confuent Hypergeometric Function and Whittaker FunctionsDocument13 pagesThe Confuent Hypergeometric Function and Whittaker FunctionsfumiNo ratings yet
- Big M MethodDocument9 pagesBig M MethodCik Naimatul HasanahNo ratings yet
- Euler Problems ExcerptDocument6 pagesEuler Problems ExcerptzosifhanwgcNo ratings yet
- Pattern Recognition Lecture Bayes Decision Theory: Prof. Dr. Marcin GrzegorzekDocument35 pagesPattern Recognition Lecture Bayes Decision Theory: Prof. Dr. Marcin Grzegorzekjxy160No ratings yet
- Chapter 6 Alford PDFDocument179 pagesChapter 6 Alford PDFrovelyn giltendezNo ratings yet