Download as docx, pdf, or txt
You might also like
- Optics 5th Edition Hecht Solutions ManualDocument10 pagesOptics 5th Edition Hecht Solutions Manualoliviabutlerogdjmztrka100% (16)
- Z Transformacije PDFDocument2 pagesZ Transformacije PDFamilaNo ratings yet
- Laplace Tables and PropertiesDocument2 pagesLaplace Tables and Propertiesahmed belalNo ratings yet
- Laplace Tables and PropertiesDocument2 pagesLaplace Tables and PropertiesYoussef MohamedNo ratings yet
- Ch6 Sampling PDFDocument70 pagesCh6 Sampling PDFVarshaIyerNo ratings yet
- Ch6 SamplingDocument70 pagesCh6 SamplingKushagra BhargavaNo ratings yet
- CombinepdfDocument56 pagesCombinepdfGuţ SebastianNo ratings yet
- Bảng BD F.RDocument1 pageBảng BD F.Rpro2212No ratings yet
- Power Systems Operation and Control: DR Mousa MarzbandDocument73 pagesPower Systems Operation and Control: DR Mousa MarzbandLyu XinhangNo ratings yet
- Tabela LaplaceDocument1 pageTabela LaplaceThiago LiãoNo ratings yet
- FourierTransformPairs e Formulas PDFDocument5 pagesFourierTransformPairs e Formulas PDFdiogo edlerNo ratings yet
- Fourier1 PDFDocument5 pagesFourier1 PDFManuel Corona CárdenasNo ratings yet
- FourierTransformPairs e Formulas PDFDocument5 pagesFourierTransformPairs e Formulas PDFdiogo edlerNo ratings yet
- Table of Fourier Transform PairsDocument5 pagesTable of Fourier Transform PairsDr-Mandeep SinghNo ratings yet
- Tabela e Transformimeve Furier PDFDocument5 pagesTabela e Transformimeve Furier PDFHD MediaNo ratings yet
- FourierTransformPairs e Formulas PDFDocument5 pagesFourierTransformPairs e Formulas PDFdiogo edlerNo ratings yet
- Fourier Transform PairsDocument5 pagesFourier Transform PairsMahendra SinghNo ratings yet
- Fourier Transform PairsDocument5 pagesFourier Transform Pairsrendy AnggaraNo ratings yet
- Fourier Transform PairsDocument5 pagesFourier Transform PairsSwati100% (1)
- Lampiran 1: Sulit (EET207)Document3 pagesLampiran 1: Sulit (EET207)RafaelTituzNo ratings yet
- Tabela Transformada de LaplaceDocument1 pageTabela Transformada de LaplaceMatheus VieiraNo ratings yet
- Laplace DonusumuDocument4 pagesLaplace DonusumuAlyakut IbrahimNo ratings yet
- S13.s1 MaterialDocument14 pagesS13.s1 MaterialFrank Martinez HernandezNo ratings yet
- Tabela Laplace AtualDocument2 pagesTabela Laplace AtualTumblr BoyNo ratings yet
- Wa0003.Document10 pagesWa0003.Dhwangjwok JosephNo ratings yet
- Fourier Transform TableDocument7 pagesFourier Transform TableGandhi NapitupuluNo ratings yet
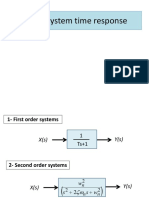
- 4 - System Time ResponseDocument16 pages4 - System Time ResponseAndrewAbdelmassiehNo ratings yet
- EE-232 Signals & Systems: Fourier Series & Fourier TransformsDocument17 pagesEE-232 Signals & Systems: Fourier Series & Fourier TransformsHaris AsifNo ratings yet
- Sheet 2Document1 pageSheet 2ahmed belalNo ratings yet
- Laplace TableDocument2 pagesLaplace Tablechenliangteoh2908No ratings yet
- Laplace Transform: Presentation: He YangDocument14 pagesLaplace Transform: Presentation: He YangsaadkhalisNo ratings yet
- F (T) F(S) : TABLE 9.1 Laplace Transforms Exam #Document1 pageF (T) F(S) : TABLE 9.1 Laplace Transforms Exam #Yusri TriadiNo ratings yet
- Formulario de Transformadas de LaplaceDocument1 pageFormulario de Transformadas de LaplaceAnthony E. LqNo ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFMartin MuñozNo ratings yet
- Laplace TableDocument1 pageLaplace TableJoaquín GonzálezNo ratings yet
- Table of Laplace Transforms: at BTDocument1 pageTable of Laplace Transforms: at BTValentina EspinozaNo ratings yet
- Week04Module03 FourierTransformsDocument13 pagesWeek04Module03 FourierTransformsrra127No ratings yet
- Midterm Study ProblemDocument4 pagesMidterm Study ProblemTehe SaglamNo ratings yet
- L6-L7-Matrices For Linear TransformationsDocument32 pagesL6-L7-Matrices For Linear TransformationsHarshini MNo ratings yet
- t n t t: Impulso δ 1 Escalón unitarioDocument5 pagest n t t: Impulso δ 1 Escalón unitarioAsalia Trinidad Pedraza AguilarNo ratings yet
- Laplace TransformDocument1 pageLaplace TransformCristian GrajalesNo ratings yet
- Two Cavity KlystronDocument21 pagesTwo Cavity KlystronmostafaaessaaNo ratings yet
- Tabela LaplaceDocument1 pageTabela LaplaceDorivaldo Sebasti�o Gomes 20190511No ratings yet
- Anexa1 Transformata LaplaceDocument1 pageAnexa1 Transformata LaplaceiphonemellaaNo ratings yet
- Handout - 04 (CT)Document4 pagesHandout - 04 (CT)Mohian RahmanNo ratings yet
- Optics 5th Edition Hecht Solutions ManualDocument8 pagesOptics 5th Edition Hecht Solutions ManualAyoob GhasemiNo ratings yet
- Signals and SystemsDocument106 pagesSignals and SystemsNishat Jahan TarannumNo ratings yet
- ANN - Ch2-Adaline and MadalineDocument29 pagesANN - Ch2-Adaline and MadalineMuhanad Al-khalisy100% (1)
- LT Tables Rev3Document2 pagesLT Tables Rev3Muhammad AbdullahNo ratings yet
- Practice 7 (Solution) : S S e S L S e S LDocument6 pagesPractice 7 (Solution) : S S e S L S e S LckithoNo ratings yet
- 2-Lecture 02 Electrical Networks Transfer FunctionDocument18 pages2-Lecture 02 Electrical Networks Transfer FunctionHamza KhanNo ratings yet
- Tabla Laplace Resumida 1Document1 pageTabla Laplace Resumida 1manzanopinedainesdelcarmenNo ratings yet
- XT e E: 1. (A) and (B)Document19 pagesXT e E: 1. (A) and (B)Anonymous 0MQ3zRNo ratings yet
- Motion in Two Dimensions - Miscellaneous SolutionsDocument12 pagesMotion in Two Dimensions - Miscellaneous SolutionsJee AspirantNo ratings yet
- Lecture 3 ModelingDocument28 pagesLecture 3 ModelingSai AnoopNo ratings yet
- LaplaceDocument3 pagesLaplaceperrokswkajNo ratings yet
- Common Laplace Transform PairsDocument2 pagesCommon Laplace Transform Pairscharles_cruz_9No ratings yet
- Laplace TableDocument2 pagesLaplace TableBerkay EkenNo ratings yet
- EE 401 Control Systems Analysis and Design: A Review of The Laplace TransformDocument18 pagesEE 401 Control Systems Analysis and Design: A Review of The Laplace TransformJoshua HernandezNo ratings yet
- Semi 2Document55 pagesSemi 2saichandrasekhar_dNo ratings yet
- RF Current - Injection Clamp Type EM 101 Electromagnetic Glamp, System Swiss PTTDocument27 pagesRF Current - Injection Clamp Type EM 101 Electromagnetic Glamp, System Swiss PTTFerhat CoşkunNo ratings yet
- 9 To 11Document3 pages9 To 11Nandish AcharlNo ratings yet
- IOT ARduino PDFDocument84 pagesIOT ARduino PDFKuppan Chetty RamanathanNo ratings yet
- Intreruperi C EmbeddedDocument6 pagesIntreruperi C Embeddedalexandra_popuNo ratings yet
- Analog-To-digital Converter - Wikipedia, The Free EncyclopediaDocument6 pagesAnalog-To-digital Converter - Wikipedia, The Free EncyclopediaAziz SahatNo ratings yet
- Space Vector Pulse Width Modulation Hardware Implementation: User GuideDocument20 pagesSpace Vector Pulse Width Modulation Hardware Implementation: User GuideSubhamayNo ratings yet
- Type C - Solid Core Current Transformer (Cable Profile) : Currebt Transformers Functions and CharacteristicsDocument3 pagesType C - Solid Core Current Transformer (Cable Profile) : Currebt Transformers Functions and CharacteristicsGopal DasiriNo ratings yet
- IC-730 ServDocument136 pagesIC-730 ServAlberto UdoviciNo ratings yet
- AcerTravelmate 8481 Service GuideDocument229 pagesAcerTravelmate 8481 Service GuideAdrianNo ratings yet
- Introduction of ZTE MW Hardware Installation Guide PDFDocument34 pagesIntroduction of ZTE MW Hardware Installation Guide PDFIbrahim Shabbir100% (1)
- Ut33d PlusDocument2 pagesUt33d Plus2015caiserNo ratings yet
- TV SpecsDocument9 pagesTV SpecsMarlonNo ratings yet
- Project ProposalDocument4 pagesProject ProposalSushrut BhatNo ratings yet
- OPA2111Document15 pagesOPA2111Fernando Montes de OcaNo ratings yet
- Turns Ratio TestDocument3 pagesTurns Ratio TestGurunadha rao kankakalaNo ratings yet
- Renault Video Interface ManualDocument5 pagesRenault Video Interface ManualRoberto Koch da SilveiraNo ratings yet
- Mujammami-IEEE Access-2019Document12 pagesMujammami-IEEE Access-2019Rui Vaz AlmeidaNo ratings yet
- Hikvision Price ListDocument34 pagesHikvision Price ListkarimNo ratings yet
- TV Service ModesDocument93 pagesTV Service ModesjohnleiNo ratings yet
- Wallace Tree Multiplier Part1Document5 pagesWallace Tree Multiplier Part1vineeth_vs_4No ratings yet
- Fast-Recovery Rectifier Diodes: FMU-G16S FMU-G26S Fmu-G2YxsDocument1 pageFast-Recovery Rectifier Diodes: FMU-G16S FMU-G26S Fmu-G2YxsDd DdNo ratings yet
- Kenwood-Dvr 7000 - 482Document33 pagesKenwood-Dvr 7000 - 482jan WalbersNo ratings yet
- HuaweiDocument66 pagesHuaweiLyric DubeyNo ratings yet
- Andrea GoldsmithDocument99 pagesAndrea GoldsmithdhayavelNo ratings yet
- Datasheet Skylla Charger ENDocument2 pagesDatasheet Skylla Charger ENminhtam123No ratings yet
- ATOM GPS Quick Installation GuideDocument4 pagesATOM GPS Quick Installation GuideAZRA comNo ratings yet
- An Asynchronous Low Power Viterbi DecoderDocument5 pagesAn Asynchronous Low Power Viterbi DecoderInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Cpu DesignDocument11 pagesCpu DesignnatyNo ratings yet
- 9600 Service ManualDocument150 pages9600 Service ManualElliot Randolph SavageNo ratings yet