Download as pdf or txt
You might also like
- Harmony Email and Collaboration Lab Guide v1.3Document48 pagesHarmony Email and Collaboration Lab Guide v1.3atreus ccNo ratings yet
- Kotler Chapter 17 MCQDocument42 pagesKotler Chapter 17 MCQAnthony Scott84% (19)
- Int J of Nursing Knowl - 2021 - Aleandri - Electronic Nursing Care Plans Through The Use of NANDA NOC and NIC TaxonomiesDocument9 pagesInt J of Nursing Knowl - 2021 - Aleandri - Electronic Nursing Care Plans Through The Use of NANDA NOC and NIC TaxonomiesSapti WidadiNo ratings yet
- GoodBadUgly PDFDocument1 pageGoodBadUgly PDFNani RujaNo ratings yet
- 01 Esquema Uni4 IncompletoDocument1 page01 Esquema Uni4 IncompletoViva la VidaNo ratings yet
- Protein Synthesis Drag & Drop Activity 2021Document6 pagesProtein Synthesis Drag & Drop Activity 2021Gloria LaneNo ratings yet
- Split DNA (Old Strand) New DNA Strand Split DNA (Old Strand) New Dna StrandDocument1 pageSplit DNA (Old Strand) New DNA Strand Split DNA (Old Strand) New Dna StrandjuanNo ratings yet
- Sequencing 2021-03-24 07 - 33 - 04Document13 pagesSequencing 2021-03-24 07 - 33 - 04Miral AlasbahiNo ratings yet
- PATH+Molecular Best Mohammad A Vasef MD, Aaron Auerbach MD MPH - Diagnostic Pathology - Molecular Oncology (2019, Elsevier)Document1,005 pagesPATH+Molecular Best Mohammad A Vasef MD, Aaron Auerbach MD MPH - Diagnostic Pathology - Molecular Oncology (2019, Elsevier)cristina.mazaroaieNo ratings yet
- Diagnostic Pathology Molecular Oncology 2Nd Edition Mohammad A Vasef MD Full ChapterDocument67 pagesDiagnostic Pathology Molecular Oncology 2Nd Edition Mohammad A Vasef MD Full Chapterina.mccrea979100% (17)
- Jesus Loves Me (Materi Ngajar)Document2 pagesJesus Loves Me (Materi Ngajar)Felix WinarsoNo ratings yet
- Lecture 15 - Molecular GeneticsDocument5 pagesLecture 15 - Molecular GeneticsANGELYSSA MIKAELA MARAONNo ratings yet
- AF034620Document1 pageAF034620donya16No ratings yet
- Can Can B1Document1 pageCan Can B1pianistadomarNo ratings yet
- Accidentally in LoveDocument2 pagesAccidentally in LoveleonardopadovaniNo ratings yet
- Tablaturas PDFDocument60 pagesTablaturas PDFEder Chagas100% (5)
- Wrestling Drawings CombinedDocument14 pagesWrestling Drawings Combinedchawlaanjali18No ratings yet
- Christmas in About Three Minutes: Joyfully Ca. 100Document9 pagesChristmas in About Three Minutes: Joyfully Ca. 100Simon LawrensonNo ratings yet
- Sonata F-Dur: ! Y C #Ycthc CCTGCCCT CCCTGCCCTHC CXCTGCCCDocument6 pagesSonata F-Dur: ! Y C #Ycthc CCTGCCCT CCCTGCCCTHC CXCTGCCCBlancaNo ratings yet
- W O # W O W WT CCC CC CC CCC O W # W: Through-Out The EarthDocument1 pageW O # W O W WT CCC CC CC CCC O W # W: Through-Out The EarthBambi LagartoNo ratings yet
- BOM AnnexureDocument6 pagesBOM AnnexurerinkukachhelaNo ratings yet
- Berger Silk Glamour 2019 SCDocument2 pagesBerger Silk Glamour 2019 SCyzk9xkdg2wNo ratings yet
- Senfoni: G C C G CDocument1 pageSenfoni: G C C G CTirdad SahlamalNo ratings yet
- Ensamblaje de Genomas PDFDocument95 pagesEnsamblaje de Genomas PDFAlfredo Gonzalez MateoNo ratings yet
- Himno A La AlegriaDocument1 pageHimno A La AlegriaNicolas NavarroNo ratings yet
- Aquela Musica: G A C G G GCDocument1 pageAquela Musica: G A C G G GCSimon De Primo FrizonNo ratings yet
- Standard Highway Sign Border Specifications: A RadiusDocument7 pagesStandard Highway Sign Border Specifications: A Radiusapi-19757021No ratings yet
- ACFrOgD2Hd09HD-2bYjWRBoemR1CppphsglSGyQfw533Ipu12fBo MkaDzs7g93oQatiArkfBtT1qdca9heb0DQ-hTVpG4ydYJmQ8l3mshzYOMqwd7v0w3RtcItch7ry9l5lNFAfkmj AYX1TCRDocument5 pagesACFrOgD2Hd09HD-2bYjWRBoemR1CppphsglSGyQfw533Ipu12fBo MkaDzs7g93oQatiArkfBtT1qdca9heb0DQ-hTVpG4ydYJmQ8l3mshzYOMqwd7v0w3RtcItch7ry9l5lNFAfkmj AYX1TCRGabriel HerreraNo ratings yet
- Curtain PanelsDocument2 pagesCurtain Panelschubi2010No ratings yet
- Dna Coloring PageDocument1 pageDna Coloring PageBarbara HenriquezNo ratings yet
- IVT-M-LA-01 (Layout Compact Indexer 3 ST x3 Cages 15TDocument1 pageIVT-M-LA-01 (Layout Compact Indexer 3 ST x3 Cages 15Twelding centreschoolNo ratings yet
- Himno A La AlegríaDocument1 pageHimno A La AlegríaValentina Salazar AguirreNo ratings yet
- Pedazo de Acordeón: Alejo Durán C G CDocument2 pagesPedazo de Acordeón: Alejo Durán C G CLuis David Meza DiazNo ratings yet
- Lecture 20, RNA Synthesis TranscriptionDocument10 pagesLecture 20, RNA Synthesis TranscriptionNariopolusNo ratings yet
- Signature of ControversyDocument105 pagesSignature of ControversyopchopperNo ratings yet
- 2001 01 1910 Keep The Commandments TGLDocument1 page2001 01 1910 Keep The Commandments TGLJoshua C. RamosNo ratings yet
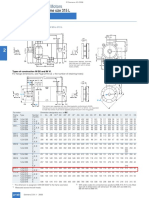
- Siemens 1LA7 Cat 130Document1 pageSiemens 1LA7 Cat 130berkahharianNo ratings yet
- Lily S Theme ProntoDocument3 pagesLily S Theme Prontosacha.devijverNo ratings yet
- New QB 2Document1 pageNew QB 2portcityspartansfbNo ratings yet
- TheGoldRing PDFDocument1 pageTheGoldRing PDFtkaj15No ratings yet
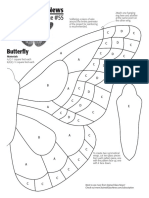
- Stained Glass News: Project Pattern Issue #55Document1 pageStained Glass News: Project Pattern Issue #55Adriana SilvaNo ratings yet
- New QBDocument1 pageNew QBportcityspartansfbNo ratings yet
- Canzona Per Sonare - Brass Quintet PDFDocument10 pagesCanzona Per Sonare - Brass Quintet PDFGiorgio Giusiano100% (1)
- 12437B-663 Rev.C-ModelDocument1 page12437B-663 Rev.C-ModelNikunj SolankiNo ratings yet
- Happy Birthday: P. Hill/M. HillDocument1 pageHappy Birthday: P. Hill/M. HillHàn DươngNo ratings yet
- Wohlfahrt Violin Studies - Op 45 No.1 PDFDocument1 pageWohlfahrt Violin Studies - Op 45 No.1 PDFAyoubNo ratings yet
- Thra Eh Tha Khu CkeyDocument1 pageThra Eh Tha Khu CkeySaung Ei Shoon LeiNo ratings yet
- Londonroads BlockpatternfinalDocument1 pageLondonroads BlockpatternfinalMaria RodriguezNo ratings yet
- Trio (Clarinet) - Mozart, Zauberfloete (Finale)Document1 pageTrio (Clarinet) - Mozart, Zauberfloete (Finale)Adry LepeNo ratings yet
- GoodBadUgly PDFDocument1 pageGoodBadUgly PDFGlorija MaksimovićNo ratings yet
- GoodBadUgly PDFDocument1 pageGoodBadUgly PDFGlorija MaksimovićNo ratings yet
- GoodBadUgly Uku PDFDocument1 pageGoodBadUgly Uku PDFyouedanNo ratings yet
- GoodBadUgly PDFDocument1 pageGoodBadUgly PDFNani RujaNo ratings yet
- Ode To Joy: Guitar TabDocument1 pageOde To Joy: Guitar TabFedericoNo ratings yet
- Ode To Joy GTM PDFDocument1 pageOde To Joy GTM PDFfinch halleyburtonNo ratings yet
- Allegretto No. 9 From 24 Short and Easy Pieces Op. 1 Alexander Robert ReinagleDocument1 pageAllegretto No. 9 From 24 Short and Easy Pieces Op. 1 Alexander Robert ReinagleTejaanshii MaheshwariNo ratings yet
- Sassy SeahorseDocument1 pageSassy Seahorseapi-3842989No ratings yet
- Ode An Die FreudeDocument1 pageOde An Die FreudeCarlos LizcanoNo ratings yet
- Tell - The - Truth CopaseticDocument1 pageTell - The - Truth CopaseticAntti SnellmanNo ratings yet
- WarehouseDocument1 pageWarehousemagesh mNo ratings yet
- ECOL (TATC) Series High Efficiency Aluminum-Cast Iron MotorsDocument13 pagesECOL (TATC) Series High Efficiency Aluminum-Cast Iron MotorsJuan Sebastian HernandezNo ratings yet
- Test BookletDocument10 pagesTest Bookletl.coupumoison44No ratings yet
- The Crimson Cowboys: The Remarkable Odyssey of the 1931 Claflin-Emerson ExpeditionFrom EverandThe Crimson Cowboys: The Remarkable Odyssey of the 1931 Claflin-Emerson ExpeditionNo ratings yet
- R 1234Document1 pageR 1234api-473188691No ratings yet
- Caps-Event Manager: Ishitakumari - Saboo@bba - Christuniversity.inDocument4 pagesCaps-Event Manager: Ishitakumari - Saboo@bba - Christuniversity.inishita sabooNo ratings yet
- Tabela de Cores - Java - Interface GraficaDocument79 pagesTabela de Cores - Java - Interface GraficaMarcos OliveiraNo ratings yet
- Thesis Rika MahliaDocument121 pagesThesis Rika MahliaSiyatinNo ratings yet
- Lec 3-5 Activities 5d88c72a71d0eDocument11 pagesLec 3-5 Activities 5d88c72a71d0eJustin Ibiste100% (1)
- Gigabyte Ga-Z170x Gaming GT Rev 1.01 PDFDocument76 pagesGigabyte Ga-Z170x Gaming GT Rev 1.01 PDFLalu KurniawanNo ratings yet
- SMC™ Dialog Plus Specifications: Additional ResourcesDocument14 pagesSMC™ Dialog Plus Specifications: Additional ResourcessimbamikeNo ratings yet
- r12 Ach StepsDocument4 pagesr12 Ach StepsPradeep Kumar ShuklaNo ratings yet
- Teaching of 808688 Programming With Assembly EmulatorDocument8 pagesTeaching of 808688 Programming With Assembly Emulatordihosid99No ratings yet
- Empowering Privacy-Preserving Machine Learning: A Comprehensive Survey On Federated LearningDocument12 pagesEmpowering Privacy-Preserving Machine Learning: A Comprehensive Survey On Federated LearningIJARSCT JournalNo ratings yet
- Perception Scanworks Cable Within ThisDocument34 pagesPerception Scanworks Cable Within Thiseastwood1235No ratings yet
- P.mapper User Manual: Directory and File StructureDocument9 pagesP.mapper User Manual: Directory and File StructureadhityabcNo ratings yet
- IEM PI A100 - Application Form - Final VersionDocument8 pagesIEM PI A100 - Application Form - Final Versionfender 87No ratings yet
- Avaya Vs Cisco ComparisonDocument29 pagesAvaya Vs Cisco ComparisonkaleemNo ratings yet
- CV Angel MunozDocument2 pagesCV Angel MunozAngel MunozNo ratings yet
- Gauss Contest Preparation-2Document7 pagesGauss Contest Preparation-2kheyNo ratings yet
- Star UMLDocument24 pagesStar UMLTirumala Placement Cell-hydNo ratings yet
- World leader, natural philosophy master Fang Ruida on the high probability events of the world’s human beings and the universe one million years later-hybrid compound enrichment mathematics-a new mathematical revolution, a revolution in mathematical logic (Roland)2015Document17 pagesWorld leader, natural philosophy master Fang Ruida on the high probability events of the world’s human beings and the universe one million years later-hybrid compound enrichment mathematics-a new mathematical revolution, a revolution in mathematical logic (Roland)2015Vats LaskNo ratings yet
- Archmodels Vol 210Document12 pagesArchmodels Vol 210santos lopezNo ratings yet
- 120 Ways To Save Electricity at HomeDocument11 pages120 Ways To Save Electricity at HomearkiTOM18No ratings yet
- SQL Lab 2Document10 pagesSQL Lab 2Adnan AsifNo ratings yet
- DR Profibus Sbs A5e66309-1gbDocument52 pagesDR Profibus Sbs A5e66309-1gbchochoroyNo ratings yet
- Brochure MK5 SharpeyeDocument2 pagesBrochure MK5 SharpeyeAfdhal KamarulzamanNo ratings yet
- Willian Henry Gates 00718125448-Phpapp02Document26 pagesWillian Henry Gates 00718125448-Phpapp02Prateek Upadhyay100% (1)
- Firefly Primer 1.003Document37 pagesFirefly Primer 1.003thechickenisbadNo ratings yet
- Scatterpoint Jul-Aug 2005 Info Ra18h1213gDocument24 pagesScatterpoint Jul-Aug 2005 Info Ra18h1213grobidjoNo ratings yet
- NFA - NFA - DFA EquivalenceDocument14 pagesNFA - NFA - DFA EquivalenceRahul SinghNo ratings yet