Download as pdf or txt
You might also like
- Manual Refrigerador Vesfrost MK-144 PDFDocument88 pagesManual Refrigerador Vesfrost MK-144 PDFangieNo ratings yet
- Wind Turbine Modelling and Pitch Angle Control Using PID, Fuzzy and Adaptive Fuzzy Control TechniquesDocument6 pagesWind Turbine Modelling and Pitch Angle Control Using PID, Fuzzy and Adaptive Fuzzy Control TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Asma TounsiDocument13 pagesAsma TounsiHAFEDH ABIDNo ratings yet
- PSO-Backstepping Controller of A Grid Connected DFIG Based Wind TurbineDocument12 pagesPSO-Backstepping Controller of A Grid Connected DFIG Based Wind Turbinehamza gaNo ratings yet
- ID 9 Full PaperDocument6 pagesID 9 Full Paperjawed ahmedNo ratings yet
- A Meriem2017Document6 pagesA Meriem2017hamza mesaiNo ratings yet
- Wind Turbine Doubly-Fed Induction Generator Defects Diagnosis Under Voltage DipsDocument13 pagesWind Turbine Doubly-Fed Induction Generator Defects Diagnosis Under Voltage DipsTELKOMNIKANo ratings yet
- Atef 22622-45422-1-PBDocument11 pagesAtef 22622-45422-1-PBabidhafedh_842455669No ratings yet
- Sliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionDocument13 pagesSliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionelecnaimelecNo ratings yet
- DTC Backstepping Based Control of Double Fed Induction GeneratorDocument6 pagesDTC Backstepping Based Control of Double Fed Induction GeneratorGzam RaïfaNo ratings yet
- ASEAN Journal of Science and Engineering 3 (2) (2023) 115-122Document8 pagesASEAN Journal of Science and Engineering 3 (2) (2023) 115-122dimasbrahmana22No ratings yet
- Modeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsDocument6 pagesModeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsSamundra GurungNo ratings yet
- EEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCDocument6 pagesEEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCShruthi SaNo ratings yet
- Stability Improvement of A Grid Connected Offshore WindFarm System Using ANN Based IPFC JVETDocument7 pagesStability Improvement of A Grid Connected Offshore WindFarm System Using ANN Based IPFC JVETmailtork85No ratings yet
- SSRN Id3553864Document7 pagesSSRN Id3553864shubhamgarna.ytNo ratings yet
- 1 PBDocument10 pages1 PBaasfklNo ratings yet
- IET Renewable Power Gen - 2017 - Wang - Dynamic Power Flow Algorithm Considering Frequency Regulation of Wind PowerDocument8 pagesIET Renewable Power Gen - 2017 - Wang - Dynamic Power Flow Algorithm Considering Frequency Regulation of Wind Powerm.rajabinasabNo ratings yet
- A Novel Approach To Maximize Performance and Reliability of PMSG Based Wind Turbine: Bangladesh PerspectiveDocument12 pagesA Novel Approach To Maximize Performance and Reliability of PMSG Based Wind Turbine: Bangladesh PerspectiveKien MoiNo ratings yet
- Review On Wind Power Generation With Doubly Fed Induction GeneratorDocument6 pagesReview On Wind Power Generation With Doubly Fed Induction GeneratorAbhimanyu YadavNo ratings yet
- ARTICULO de AerogeneradorDocument9 pagesARTICULO de AerogeneradorNelson Rafael Vicent RuedaNo ratings yet
- Content ServerDocument15 pagesContent Serverayoub reseauNo ratings yet
- Design and Analysis of Direct Power and Flux Control of Dual Stator Induction Generator Integrated in Wind Conversion System Connected To The GridDocument6 pagesDesign and Analysis of Direct Power and Flux Control of Dual Stator Induction Generator Integrated in Wind Conversion System Connected To The Gridhamza mesaiNo ratings yet
- Modeling and Simulation of A Small Wind Turbine System Based On PMSG GeneratorDocument6 pagesModeling and Simulation of A Small Wind Turbine System Based On PMSG GeneratorSơn PhạmNo ratings yet
- Control The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorDocument7 pagesControl The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorhassenbbNo ratings yet
- Modeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time SimulationsDocument9 pagesModeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time Simulationsmlsawhney2996No ratings yet
- Paper ID 105Document6 pagesPaper ID 105hassenbbNo ratings yet
- Vertical Axis Wind Turbine ImprovementDocument11 pagesVertical Axis Wind Turbine Improvementahmad rosyidNo ratings yet
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDocument6 pagesJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- 1 s2.0 S1876610213017268 Main PDFDocument10 pages1 s2.0 S1876610213017268 Main PDFMaroju Santosh KiranNo ratings yet
- 510 TorresDocument6 pages510 TorresnavidelecNo ratings yet
- Estimacion CPDocument6 pagesEstimacion CPEdjavier CastilloNo ratings yet
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 pagesAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNo ratings yet
- Sliding Mode Control Strategy For Variable Speed Wind TurbineDocument5 pagesSliding Mode Control Strategy For Variable Speed Wind TurbineDuyên Nguyễn NgọcNo ratings yet
- Iarjset 16 P125Document8 pagesIarjset 16 P125Việt NguyễnNo ratings yet
- Active and Reactive Power Control of DFIG Used in WECS Using PI Controller and BacksteppingDocument6 pagesActive and Reactive Power Control of DFIG Used in WECS Using PI Controller and BacksteppingGzam RaïfaNo ratings yet
- PMSG ModelingDocument6 pagesPMSG Modelingوليد ابو شاكرNo ratings yet
- Comparative Analysis Between PI & Backstepping Control Strategies of DFIG Driven by Wind TurbineDocument10 pagesComparative Analysis Between PI & Backstepping Control Strategies of DFIG Driven by Wind Turbinehamza gaNo ratings yet
- Juan Carlos Ps Ce 11Document7 pagesJuan Carlos Ps Ce 11Ashik AhmedNo ratings yet
- Modelling and Fuzzy Logic Control of DFIG Based Wind Energy Conversion SystemsDocument6 pagesModelling and Fuzzy Logic Control of DFIG Based Wind Energy Conversion SystemsNa ChNo ratings yet
- Power Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorDocument13 pagesPower Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- Maximum Power Point Tracking of Variable Speed Wind Energy Conversion SystemDocument9 pagesMaximum Power Point Tracking of Variable Speed Wind Energy Conversion SystemJoniNo ratings yet
- Direct Torque Control of Cascaded Brushless Doubly Fed Induction Generator For Wind Energy ApplicationsDocument6 pagesDirect Torque Control of Cascaded Brushless Doubly Fed Induction Generator For Wind Energy Applicationsvenky258No ratings yet
- Investigation and Comparative Study of A New Direct Torque Control Strategy Based On A Well-Balanced Multilevel InverterDocument8 pagesInvestigation and Comparative Study of A New Direct Torque Control Strategy Based On A Well-Balanced Multilevel InverterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- DTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedDocument6 pagesDTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedJevin ZackNo ratings yet
- Optimal Location and Reactive Power Injection of WDocument8 pagesOptimal Location and Reactive Power Injection of WAzuan Abdul RazakNo ratings yet
- Content ServerDocument18 pagesContent Serverayoub reseauNo ratings yet
- DFIG-Based Wind Turbine Robust Control Using High-Order Sliding Modes and A High Gain ObserverDocument8 pagesDFIG-Based Wind Turbine Robust Control Using High-Order Sliding Modes and A High Gain Observerabdeldjabbar14No ratings yet
- A MPPT Strategy Based On Cuckoo Search For Wind enDocument6 pagesA MPPT Strategy Based On Cuckoo Search For Wind enbensumbbNo ratings yet
- Modeling of Wind Energy System With MPPTDocument6 pagesModeling of Wind Energy System With MPPTsbv1986No ratings yet
- Yessef1 2022Document15 pagesYessef1 2022Mourad YESSEFNo ratings yet
- IISTE Journals Publication Nearest EditiDocument8 pagesIISTE Journals Publication Nearest EditiNguyễn Hải ĐăngNo ratings yet
- PSCAD Based Dynamic ModelingDocument7 pagesPSCAD Based Dynamic ModelingLalith KrishnanNo ratings yet
- Micro-Grid Simulation During Grid-Connected and Islanded Modes of OperationDocument6 pagesMicro-Grid Simulation During Grid-Connected and Islanded Modes of OperationNguyễn Đức NguyệnNo ratings yet
- Performance Study of Grid Connected PMSG Based Wind Turbine SystemDocument4 pagesPerformance Study of Grid Connected PMSG Based Wind Turbine SystemDjedidi Med RiadhNo ratings yet
- Data 1 DuaDocument8 pagesData 1 Duadodol garutNo ratings yet
- Incremental Conductance Technique For A Hybrid Wind - Solar Energy SystemDocument4 pagesIncremental Conductance Technique For A Hybrid Wind - Solar Energy SystemHanumante AkshayNo ratings yet
- Distribution System DesignDocument6 pagesDistribution System DesignMAcryan Pacquiao PactolNo ratings yet
- Facts Based Controller For Interconnected Hydrothermal Power SystemDocument11 pagesFacts Based Controller For Interconnected Hydrothermal Power Systemnuzi62No ratings yet
- Volume (8) Issue (4) 493-507Document15 pagesVolume (8) Issue (4) 493-507Seid BegovicNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Belden 9857 010 1000 DatasheetDocument2 pagesBelden 9857 010 1000 DatasheetCesar MCNo ratings yet
- Master LEDTube 1200 MM 18W 865 T8 I WDocument3 pagesMaster LEDTube 1200 MM 18W 865 T8 I WAulia RahmahNo ratings yet
- Building A Data CenterDocument3 pagesBuilding A Data CenterGuillermo Lopez-FloresNo ratings yet
- Digital Electronics Interview Questions PDFDocument3 pagesDigital Electronics Interview Questions PDFSanjeev100% (2)
- Fcu PDFDocument12 pagesFcu PDFonspsnonsNo ratings yet
- Instruction Manual: BT-1 - RS232 Bluetooth AdapterDocument1 pageInstruction Manual: BT-1 - RS232 Bluetooth AdapterTonyNo ratings yet
- Coordinación de Aislamiento en Líneas Aéreas de TransmisiónDocument473 pagesCoordinación de Aislamiento en Líneas Aéreas de TransmisiónCarlos CallupeNo ratings yet
- Voice Operated AutomationDocument31 pagesVoice Operated AutomationSahil PundNo ratings yet
- Service Manual of DS Series FullyDocument64 pagesService Manual of DS Series FullylemmabekeleNo ratings yet
- Design and Implementation of Uninterruptible Power Line Communication Network For Fire Detection SystemDocument6 pagesDesign and Implementation of Uninterruptible Power Line Communication Network For Fire Detection Systemprasad357No ratings yet
- Aesa Rbe2: Aesa Radar For The Rafale, The Omnirole FighterDocument2 pagesAesa Rbe2: Aesa Radar For The Rafale, The Omnirole FighterAfeef Ibn AlbraNo ratings yet
- 8051 Interrupts: MC & Es Class 09 - 25 August September 2023Document41 pages8051 Interrupts: MC & Es Class 09 - 25 August September 2023Vinay Pratap Singh RajawatNo ratings yet
- Hammer Magnus LED CombinationsDocument1 pageHammer Magnus LED CombinationsVinícius AraujoNo ratings yet
- 12mm Size Insulated Shaft Snap-In TypeDocument5 pages12mm Size Insulated Shaft Snap-In TypeMomcilo DakovicNo ratings yet
- Logic Design Lab Verilog 101Document49 pagesLogic Design Lab Verilog 101杜岳100% (1)
- MagnetizerDocument10 pagesMagnetizersacopNo ratings yet
- Mmo 68247664 1552290576 4588 968Document519 pagesMmo 68247664 1552290576 4588 968Fendy KwanNo ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- VarSet Brochure and Catalog (Digital File)Document24 pagesVarSet Brochure and Catalog (Digital File)Mike RobertsonNo ratings yet
- Airstar Cinestar ENG LDDocument2 pagesAirstar Cinestar ENG LDVamsi Krishna MandavilliNo ratings yet
- Line To Line Fault ExperimentsDocument6 pagesLine To Line Fault ExperimentsXian ChaoweNo ratings yet
- Microelectronics Using Electron-Beam-Activated Machining TechniquesDocument159 pagesMicroelectronics Using Electron-Beam-Activated Machining TechniquesgfpeezyNo ratings yet
- Gigabit Transceivers: Redfox, Lynx Series and Odw-700 SeriesDocument2 pagesGigabit Transceivers: Redfox, Lynx Series and Odw-700 SeriesIgor NikodijevicNo ratings yet
- Cheng-Yi Cheng - Yi: KBU 10A/15A/25A/35A SERIESDocument2 pagesCheng-Yi Cheng - Yi: KBU 10A/15A/25A/35A SERIESThomas ThomasNo ratings yet
- CHN110 W Plans 1v1 141119Document8 pagesCHN110 W Plans 1v1 141119EduardoNo ratings yet
- Hardware Components STBDocument360 pagesHardware Components STBnfmaykoxNo ratings yet
- Guardian Telecom Inc.: Vandal Resistant TelephoneDocument12 pagesGuardian Telecom Inc.: Vandal Resistant TelephonedgrsriNo ratings yet
- Catalogo General Unitronics 2010Document20 pagesCatalogo General Unitronics 2010INTRAVEcom Industrial AutomationNo ratings yet
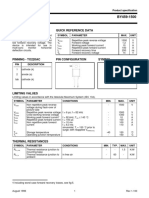
- Rectifier Diode BY459-1500 Fast, High-Voltage: General Description Quick Reference DataDocument6 pagesRectifier Diode BY459-1500 Fast, High-Voltage: General Description Quick Reference DataRusmiyanto YantoNo ratings yet