
Kalman Filter: Multiplying Normal Distributions
Kalman Filter: Multiplying Normal Distributions
You might also like
- 9780198308737Document10 pages9780198308737Menna50% (4)
- Chapter 5 Solutions Solution Manual Introductory Econometrics For FinanceDocument9 pagesChapter 5 Solutions Solution Manual Introductory Econometrics For FinanceNazim Uddin MahmudNo ratings yet
- Ruaumoko Appendices 07 PDFDocument99 pagesRuaumoko Appendices 07 PDFCristobal Jimenez MuchoNo ratings yet
- H2 Mathematics Cheat Sheet by Sean LimDocument27 pagesH2 Mathematics Cheat Sheet by Sean LimGale HawthorneNo ratings yet
- 2020 - Bretz - Notes Onf Filtering Piecewise Linear DataDocument6 pages2020 - Bretz - Notes Onf Filtering Piecewise Linear DatacleitonmoyaNo ratings yet
- KalmanDocument3 pagesKalmanHa YNo ratings yet
- Kalman Filter and Economic ApplicationsDocument15 pagesKalman Filter and Economic ApplicationsrogeliochcNo ratings yet
- Kalman FilterDocument15 pagesKalman Filterpoornima100% (1)
- The Interacting Multiple Model Algorithm For Accurate State Estimation of Maneuvering TargetsDocument10 pagesThe Interacting Multiple Model Algorithm For Accurate State Estimation of Maneuvering TargetspoonamsinghNo ratings yet
- Optimal Control TheoryDocument28 pagesOptimal Control TheoryDaniel WangNo ratings yet
- Estimation For QuadrotorsDocument12 pagesEstimation For QuadrotorsMinh HoangNo ratings yet
- Kalman Filtering: Dan SimonDocument8 pagesKalman Filtering: Dan SimonVaBi LeftNo ratings yet
- Kalman DelphiDocument8 pagesKalman DelphiNegru CiprianNo ratings yet
- Forecasting Electricity Prices Using Ensemble Kalman FilterDocument19 pagesForecasting Electricity Prices Using Ensemble Kalman Filterkebing wuNo ratings yet
- Mobile Robot Localization and Mapping Using The Kalman FilterDocument53 pagesMobile Robot Localization and Mapping Using The Kalman Filterjohnnyz88No ratings yet
- Olma 2021Document56 pagesOlma 2021KarimaNo ratings yet
- Mathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedDocument4 pagesMathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedMuhammad HaroonNo ratings yet
- Moreno - Final ExaminationDocument4 pagesMoreno - Final ExaminationJan Luziel MorenoNo ratings yet
- Estimation of Saturated Data Using The Tobit Kalman FilterDocument6 pagesEstimation of Saturated Data Using The Tobit Kalman FilterParrex ParraNo ratings yet
- L11 - Forecasting and Smoothing Using The Kalman Filter - KHDocument28 pagesL11 - Forecasting and Smoothing Using The Kalman Filter - KHلاضاهضNo ratings yet
- Kalman FiltersDocument7 pagesKalman FiltersRicardo Del RíoNo ratings yet
- Dynamic Linear Models, Recursive Least Squares and Steepest-Descent LearningDocument11 pagesDynamic Linear Models, Recursive Least Squares and Steepest-Descent Learningstathiss11No ratings yet
- Estimation of Brain Dynamic Interactions With Time-Varying Vector Autoregressive Modeling Using fMRIDocument5 pagesEstimation of Brain Dynamic Interactions With Time-Varying Vector Autoregressive Modeling Using fMRIInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- FE Notes CurrentDocument6 pagesFE Notes Currentanon_688042049No ratings yet
- From Here To InfinityDocument8 pagesFrom Here To InfinityhemakhannaNo ratings yet
- An Adaptive High-Gain Observer For Nonlinear Systems: Nicolas Boizot, Eric Busvelle, Jean-Paul GauthierDocument8 pagesAn Adaptive High-Gain Observer For Nonlinear Systems: Nicolas Boizot, Eric Busvelle, Jean-Paul Gauthiertidjani73No ratings yet
- State Estimation Using Kalman FilterDocument32 pagesState Estimation Using Kalman FilterViraj ChaudharyNo ratings yet
- InTechOpen Kalman PostprintDocument19 pagesInTechOpen Kalman PostprintLê Trung DũngNo ratings yet
- Special Problems Summer 2018 Planar Robot Localization With The Extended Kalman FilterDocument36 pagesSpecial Problems Summer 2018 Planar Robot Localization With The Extended Kalman FilterAnonymous ujfkWS8No ratings yet
- 05 Diagnostic Test of CLRM 2Document39 pages05 Diagnostic Test of CLRM 2Inge AngeliaNo ratings yet
- Kalman ObserverDocument5 pagesKalman Observerkhadars_5No ratings yet
- Smoking Adjoints: Fast Monte Carlo Greeks: Price SensitivityDocument5 pagesSmoking Adjoints: Fast Monte Carlo Greeks: Price SensitivityBen YiuNo ratings yet
- Modified Moment Estimation For A Two Parameter Gamma DistributionDocument9 pagesModified Moment Estimation For A Two Parameter Gamma DistributionInternational Organization of Scientific Research (IOSR)No ratings yet
- Unobserved Components Models in Economics and FinanceDocument34 pagesUnobserved Components Models in Economics and FinanceWennan SunNo ratings yet
- Nonlinear Observers: University of California, Davis, CA, USADocument21 pagesNonlinear Observers: University of California, Davis, CA, USASarah CarmanNo ratings yet
- Using Kalman Filter To Reduce and Estimate Type A Uncertainties in Sinusoidal SignalsDocument5 pagesUsing Kalman Filter To Reduce and Estimate Type A Uncertainties in Sinusoidal SignalsLEDNo ratings yet
- Lagrange For Dyn OptDocument11 pagesLagrange For Dyn Optjohannes_schwarzerNo ratings yet
- Name: Ahammad Nadendla Roll No: B19BB030Document12 pagesName: Ahammad Nadendla Roll No: B19BB030Ankur BorkarNo ratings yet
- (C) 2014 - Moving-Horizon Estimation For Discrete-Time Linear Systems WithDocument6 pages(C) 2014 - Moving-Horizon Estimation For Discrete-Time Linear Systems Withdr.awawdeh.moathNo ratings yet
- Using The Kalman Filter To Track Human Interactive Motion - Modelling and Initialization of The Kalman Filter For Translational MotionDocument17 pagesUsing The Kalman Filter To Track Human Interactive Motion - Modelling and Initialization of The Kalman Filter For Translational Motiongoaway3232No ratings yet
- 1 Deriving Kalman FilterDocument7 pages1 Deriving Kalman FilterMuhammad HaroonNo ratings yet
- 2000 - GlorennecDocument19 pages2000 - GlorennecFauzi AbdurrohimNo ratings yet
- 2997 Spring 2004Document201 pages2997 Spring 2004combatps1No ratings yet
- The Kalman Filter and Related Algorithms: A Literature ReviewDocument18 pagesThe Kalman Filter and Related Algorithms: A Literature ReviewTEx rexNo ratings yet
- Kalman Filter Implemented in The XA Eases Sensory Fusion: Integrated CircuitsDocument10 pagesKalman Filter Implemented in The XA Eases Sensory Fusion: Integrated CircuitshongphilongNo ratings yet
- Introductory Econometrics For Finance Chris Brooks Solutions To Review Questions - Chapter 5Document9 pagesIntroductory Econometrics For Finance Chris Brooks Solutions To Review Questions - Chapter 5Huyền my lifeNo ratings yet
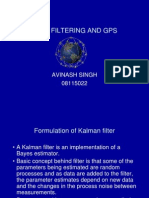
- Kalman Filtering and GPS: Avinash Singh 08115022Document10 pagesKalman Filtering and GPS: Avinash Singh 08115022Avinash SinghNo ratings yet
- Robust - MonitoringTime Series Analysis-Control ChartsDocument15 pagesRobust - MonitoringTime Series Analysis-Control ChartsArouna AlahoNo ratings yet
- Real-Time Vehicles Tracking Based On Kalman Filter in An ITSDocument7 pagesReal-Time Vehicles Tracking Based On Kalman Filter in An ITSNatalitza GolbanNo ratings yet
- 18 Adaptive ControlDocument7 pages18 Adaptive ControlFathi MusaNo ratings yet
- Pandey 2016Document6 pagesPandey 2016Sreekrishna DasNo ratings yet
- A Linear Programming Approach To Solving Stochastic Dynamic ProgramsDocument39 pagesA Linear Programming Approach To Solving Stochastic Dynamic ProgramskcvaraNo ratings yet
- A Multifrequency Theory of The Interest Rate Term Structure: Laurent Calvet, Adlai Fisher, and Liuren WuDocument24 pagesA Multifrequency Theory of The Interest Rate Term Structure: Laurent Calvet, Adlai Fisher, and Liuren WuTom WuNo ratings yet
- Panel DataDocument31 pagesPanel DatajiosNo ratings yet
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Direct Linear Transformation: Practical Applications and Techniques in Computer VisionFrom EverandDirect Linear Transformation: Practical Applications and Techniques in Computer VisionNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Motion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledFrom EverandMotion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledNo ratings yet
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- PINCH ANALYSIS Part 5 - Energy Relaxation PDFDocument10 pagesPINCH ANALYSIS Part 5 - Energy Relaxation PDFANZWAYNE100% (1)
- Lee Et Al 2005Document9 pagesLee Et Al 2005Hyejin Yeni PatmawatiNo ratings yet
- Claron 10Document257 pagesClaron 10المهندس محمود خليلNo ratings yet
- Mark Scheme (Results) Summer 2013: GCSE Mathematics (2MB01) Higher 5MB3H (Calculator) Paper 01Document20 pagesMark Scheme (Results) Summer 2013: GCSE Mathematics (2MB01) Higher 5MB3H (Calculator) Paper 01yohoNo ratings yet
- Flotation 2Document15 pagesFlotation 2anruloNo ratings yet
- Synthesis of Alum LabDocument6 pagesSynthesis of Alum LabAshraar DuaNo ratings yet
- Case Study: Design of A Fuzzy Controller Using MATLABDocument20 pagesCase Study: Design of A Fuzzy Controller Using MATLABKesavant TkesavanNo ratings yet
- Read and Understand The Sentences and Questions. Choose The Correct Answer by Shading The Corresponding Letter of The Correct AnswerDocument3 pagesRead and Understand The Sentences and Questions. Choose The Correct Answer by Shading The Corresponding Letter of The Correct AnswerCarolyn D MayugaNo ratings yet
- Excipient Compatibility PDFDocument28 pagesExcipient Compatibility PDFJitendra YadavNo ratings yet
- The Basin-Wide Two-Dimensional Model of Sediment Production and Transportation For Estuary Sediment SimulationDocument11 pagesThe Basin-Wide Two-Dimensional Model of Sediment Production and Transportation For Estuary Sediment SimulationdequanzhouNo ratings yet
- Recovery, Recrystallization, and Grain GrowthDocument12 pagesRecovery, Recrystallization, and Grain GrowthstevenwhittlNo ratings yet
- Analysis and Design of Underpass RCC BridgeDocument7 pagesAnalysis and Design of Underpass RCC Bridgeaaditya chopadeNo ratings yet
- Experiment 3-Sublimation and Melting Point DeterminationDocument3 pagesExperiment 3-Sublimation and Melting Point DeterminationEmilyn Millares100% (4)
- Lab 3 Counting StatisticsDocument10 pagesLab 3 Counting StatisticsPataki SandorNo ratings yet
- MIT2 627F13 Pset2 PDFDocument6 pagesMIT2 627F13 Pset2 PDFmusaNo ratings yet
- (IJCST-V4I3P33) :arindam Banerjee, Amarnath Sanyal, Dr. Sourish Sanyal, Raju Basak, Subhasree ChatterjeeDocument6 pages(IJCST-V4I3P33) :arindam Banerjee, Amarnath Sanyal, Dr. Sourish Sanyal, Raju Basak, Subhasree ChatterjeeEighthSenseGroupNo ratings yet
- Excel: Fig Area XC Yc Ayc Axc Ixc Iyc Ixx Iyy Cm2 CM CM Cm3 Cm3 Cm4 Cm4 Cm4 Cm4Document4 pagesExcel: Fig Area XC Yc Ayc Axc Ixc Iyc Ixx Iyy Cm2 CM CM Cm3 Cm3 Cm4 Cm4 Cm4 Cm4Frank PascumalNo ratings yet
- Burkert Catalog 2002 Pgs 1 To 44Document44 pagesBurkert Catalog 2002 Pgs 1 To 44Maximiliano Dreyer100% (1)
- Dynamic Response and The Laplace Transform Method: OutlineDocument4 pagesDynamic Response and The Laplace Transform Method: OutlineSimranNo ratings yet
- Dipmeter Image Repair Notes ADocument30 pagesDipmeter Image Repair Notes ARosa K Chang HNo ratings yet
- Out of Body Techniques ManualDocument11 pagesOut of Body Techniques ManualGabriela100% (11)
- I01 ForcesNcomponentsDocument8 pagesI01 ForcesNcomponentsSeverina Mallari0% (1)
- # 6 Kinetic Friction Experiment DiscussionDocument4 pages# 6 Kinetic Friction Experiment DiscussionTauQeer ShahNo ratings yet
- Shell Momentum Balances and Velocity Distributions in Laminar FlowDocument66 pagesShell Momentum Balances and Velocity Distributions in Laminar Flowaprfdyst100% (2)
- Draft Chpt4 Reactive Sensors 1Document35 pagesDraft Chpt4 Reactive Sensors 1Principal OfficeNo ratings yet
- Concept of Settling PDFDocument25 pagesConcept of Settling PDFkasara sreetejNo ratings yet
- Thermodynamics of FreezingDocument4 pagesThermodynamics of Freezingrodrigo nunez100% (1)























































































Download as pdf or txt
You might also like
- 9780198308737Document10 pages9780198308737Menna50% (4)
- Chapter 5 Solutions Solution Manual Introductory Econometrics For FinanceDocument9 pagesChapter 5 Solutions Solution Manual Introductory Econometrics For FinanceNazim Uddin MahmudNo ratings yet
- Ruaumoko Appendices 07 PDFDocument99 pagesRuaumoko Appendices 07 PDFCristobal Jimenez MuchoNo ratings yet
- H2 Mathematics Cheat Sheet by Sean LimDocument27 pagesH2 Mathematics Cheat Sheet by Sean LimGale HawthorneNo ratings yet
- 2020 - Bretz - Notes Onf Filtering Piecewise Linear DataDocument6 pages2020 - Bretz - Notes Onf Filtering Piecewise Linear DatacleitonmoyaNo ratings yet
- KalmanDocument3 pagesKalmanHa YNo ratings yet
- Kalman Filter and Economic ApplicationsDocument15 pagesKalman Filter and Economic ApplicationsrogeliochcNo ratings yet
- Kalman FilterDocument15 pagesKalman Filterpoornima100% (1)
- The Interacting Multiple Model Algorithm For Accurate State Estimation of Maneuvering TargetsDocument10 pagesThe Interacting Multiple Model Algorithm For Accurate State Estimation of Maneuvering TargetspoonamsinghNo ratings yet
- Optimal Control TheoryDocument28 pagesOptimal Control TheoryDaniel WangNo ratings yet
- Estimation For QuadrotorsDocument12 pagesEstimation For QuadrotorsMinh HoangNo ratings yet
- Kalman Filtering: Dan SimonDocument8 pagesKalman Filtering: Dan SimonVaBi LeftNo ratings yet
- Kalman DelphiDocument8 pagesKalman DelphiNegru CiprianNo ratings yet
- Forecasting Electricity Prices Using Ensemble Kalman FilterDocument19 pagesForecasting Electricity Prices Using Ensemble Kalman Filterkebing wuNo ratings yet
- Mobile Robot Localization and Mapping Using The Kalman FilterDocument53 pagesMobile Robot Localization and Mapping Using The Kalman Filterjohnnyz88No ratings yet
- Olma 2021Document56 pagesOlma 2021KarimaNo ratings yet
- Mathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedDocument4 pagesMathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedMuhammad HaroonNo ratings yet
- Moreno - Final ExaminationDocument4 pagesMoreno - Final ExaminationJan Luziel MorenoNo ratings yet
- Estimation of Saturated Data Using The Tobit Kalman FilterDocument6 pagesEstimation of Saturated Data Using The Tobit Kalman FilterParrex ParraNo ratings yet
- L11 - Forecasting and Smoothing Using The Kalman Filter - KHDocument28 pagesL11 - Forecasting and Smoothing Using The Kalman Filter - KHلاضاهضNo ratings yet
- Kalman FiltersDocument7 pagesKalman FiltersRicardo Del RíoNo ratings yet
- Dynamic Linear Models, Recursive Least Squares and Steepest-Descent LearningDocument11 pagesDynamic Linear Models, Recursive Least Squares and Steepest-Descent Learningstathiss11No ratings yet
- Estimation of Brain Dynamic Interactions With Time-Varying Vector Autoregressive Modeling Using fMRIDocument5 pagesEstimation of Brain Dynamic Interactions With Time-Varying Vector Autoregressive Modeling Using fMRIInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- FE Notes CurrentDocument6 pagesFE Notes Currentanon_688042049No ratings yet
- From Here To InfinityDocument8 pagesFrom Here To InfinityhemakhannaNo ratings yet
- An Adaptive High-Gain Observer For Nonlinear Systems: Nicolas Boizot, Eric Busvelle, Jean-Paul GauthierDocument8 pagesAn Adaptive High-Gain Observer For Nonlinear Systems: Nicolas Boizot, Eric Busvelle, Jean-Paul Gauthiertidjani73No ratings yet
- State Estimation Using Kalman FilterDocument32 pagesState Estimation Using Kalman FilterViraj ChaudharyNo ratings yet
- InTechOpen Kalman PostprintDocument19 pagesInTechOpen Kalman PostprintLê Trung DũngNo ratings yet
- Special Problems Summer 2018 Planar Robot Localization With The Extended Kalman FilterDocument36 pagesSpecial Problems Summer 2018 Planar Robot Localization With The Extended Kalman FilterAnonymous ujfkWS8No ratings yet
- 05 Diagnostic Test of CLRM 2Document39 pages05 Diagnostic Test of CLRM 2Inge AngeliaNo ratings yet
- Kalman ObserverDocument5 pagesKalman Observerkhadars_5No ratings yet
- Smoking Adjoints: Fast Monte Carlo Greeks: Price SensitivityDocument5 pagesSmoking Adjoints: Fast Monte Carlo Greeks: Price SensitivityBen YiuNo ratings yet
- Modified Moment Estimation For A Two Parameter Gamma DistributionDocument9 pagesModified Moment Estimation For A Two Parameter Gamma DistributionInternational Organization of Scientific Research (IOSR)No ratings yet
- Unobserved Components Models in Economics and FinanceDocument34 pagesUnobserved Components Models in Economics and FinanceWennan SunNo ratings yet
- Nonlinear Observers: University of California, Davis, CA, USADocument21 pagesNonlinear Observers: University of California, Davis, CA, USASarah CarmanNo ratings yet
- Using Kalman Filter To Reduce and Estimate Type A Uncertainties in Sinusoidal SignalsDocument5 pagesUsing Kalman Filter To Reduce and Estimate Type A Uncertainties in Sinusoidal SignalsLEDNo ratings yet
- Lagrange For Dyn OptDocument11 pagesLagrange For Dyn Optjohannes_schwarzerNo ratings yet
- Name: Ahammad Nadendla Roll No: B19BB030Document12 pagesName: Ahammad Nadendla Roll No: B19BB030Ankur BorkarNo ratings yet
- (C) 2014 - Moving-Horizon Estimation For Discrete-Time Linear Systems WithDocument6 pages(C) 2014 - Moving-Horizon Estimation For Discrete-Time Linear Systems Withdr.awawdeh.moathNo ratings yet
- Using The Kalman Filter To Track Human Interactive Motion - Modelling and Initialization of The Kalman Filter For Translational MotionDocument17 pagesUsing The Kalman Filter To Track Human Interactive Motion - Modelling and Initialization of The Kalman Filter For Translational Motiongoaway3232No ratings yet
- 1 Deriving Kalman FilterDocument7 pages1 Deriving Kalman FilterMuhammad HaroonNo ratings yet
- 2000 - GlorennecDocument19 pages2000 - GlorennecFauzi AbdurrohimNo ratings yet
- 2997 Spring 2004Document201 pages2997 Spring 2004combatps1No ratings yet
- The Kalman Filter and Related Algorithms: A Literature ReviewDocument18 pagesThe Kalman Filter and Related Algorithms: A Literature ReviewTEx rexNo ratings yet
- Kalman Filter Implemented in The XA Eases Sensory Fusion: Integrated CircuitsDocument10 pagesKalman Filter Implemented in The XA Eases Sensory Fusion: Integrated CircuitshongphilongNo ratings yet
- Introductory Econometrics For Finance Chris Brooks Solutions To Review Questions - Chapter 5Document9 pagesIntroductory Econometrics For Finance Chris Brooks Solutions To Review Questions - Chapter 5Huyền my lifeNo ratings yet
- Kalman Filtering and GPS: Avinash Singh 08115022Document10 pagesKalman Filtering and GPS: Avinash Singh 08115022Avinash SinghNo ratings yet
- Robust - MonitoringTime Series Analysis-Control ChartsDocument15 pagesRobust - MonitoringTime Series Analysis-Control ChartsArouna AlahoNo ratings yet
- Real-Time Vehicles Tracking Based On Kalman Filter in An ITSDocument7 pagesReal-Time Vehicles Tracking Based On Kalman Filter in An ITSNatalitza GolbanNo ratings yet
- 18 Adaptive ControlDocument7 pages18 Adaptive ControlFathi MusaNo ratings yet
- Pandey 2016Document6 pagesPandey 2016Sreekrishna DasNo ratings yet
- A Linear Programming Approach To Solving Stochastic Dynamic ProgramsDocument39 pagesA Linear Programming Approach To Solving Stochastic Dynamic ProgramskcvaraNo ratings yet
- A Multifrequency Theory of The Interest Rate Term Structure: Laurent Calvet, Adlai Fisher, and Liuren WuDocument24 pagesA Multifrequency Theory of The Interest Rate Term Structure: Laurent Calvet, Adlai Fisher, and Liuren WuTom WuNo ratings yet
- Panel DataDocument31 pagesPanel DatajiosNo ratings yet
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Direct Linear Transformation: Practical Applications and Techniques in Computer VisionFrom EverandDirect Linear Transformation: Practical Applications and Techniques in Computer VisionNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Motion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledFrom EverandMotion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledNo ratings yet
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- PINCH ANALYSIS Part 5 - Energy Relaxation PDFDocument10 pagesPINCH ANALYSIS Part 5 - Energy Relaxation PDFANZWAYNE100% (1)
- Lee Et Al 2005Document9 pagesLee Et Al 2005Hyejin Yeni PatmawatiNo ratings yet
- Claron 10Document257 pagesClaron 10المهندس محمود خليلNo ratings yet
- Mark Scheme (Results) Summer 2013: GCSE Mathematics (2MB01) Higher 5MB3H (Calculator) Paper 01Document20 pagesMark Scheme (Results) Summer 2013: GCSE Mathematics (2MB01) Higher 5MB3H (Calculator) Paper 01yohoNo ratings yet
- Flotation 2Document15 pagesFlotation 2anruloNo ratings yet
- Synthesis of Alum LabDocument6 pagesSynthesis of Alum LabAshraar DuaNo ratings yet
- Case Study: Design of A Fuzzy Controller Using MATLABDocument20 pagesCase Study: Design of A Fuzzy Controller Using MATLABKesavant TkesavanNo ratings yet
- Read and Understand The Sentences and Questions. Choose The Correct Answer by Shading The Corresponding Letter of The Correct AnswerDocument3 pagesRead and Understand The Sentences and Questions. Choose The Correct Answer by Shading The Corresponding Letter of The Correct AnswerCarolyn D MayugaNo ratings yet
- Excipient Compatibility PDFDocument28 pagesExcipient Compatibility PDFJitendra YadavNo ratings yet
- The Basin-Wide Two-Dimensional Model of Sediment Production and Transportation For Estuary Sediment SimulationDocument11 pagesThe Basin-Wide Two-Dimensional Model of Sediment Production and Transportation For Estuary Sediment SimulationdequanzhouNo ratings yet
- Recovery, Recrystallization, and Grain GrowthDocument12 pagesRecovery, Recrystallization, and Grain GrowthstevenwhittlNo ratings yet
- Analysis and Design of Underpass RCC BridgeDocument7 pagesAnalysis and Design of Underpass RCC Bridgeaaditya chopadeNo ratings yet
- Experiment 3-Sublimation and Melting Point DeterminationDocument3 pagesExperiment 3-Sublimation and Melting Point DeterminationEmilyn Millares100% (4)
- Lab 3 Counting StatisticsDocument10 pagesLab 3 Counting StatisticsPataki SandorNo ratings yet
- MIT2 627F13 Pset2 PDFDocument6 pagesMIT2 627F13 Pset2 PDFmusaNo ratings yet
- (IJCST-V4I3P33) :arindam Banerjee, Amarnath Sanyal, Dr. Sourish Sanyal, Raju Basak, Subhasree ChatterjeeDocument6 pages(IJCST-V4I3P33) :arindam Banerjee, Amarnath Sanyal, Dr. Sourish Sanyal, Raju Basak, Subhasree ChatterjeeEighthSenseGroupNo ratings yet
- Excel: Fig Area XC Yc Ayc Axc Ixc Iyc Ixx Iyy Cm2 CM CM Cm3 Cm3 Cm4 Cm4 Cm4 Cm4Document4 pagesExcel: Fig Area XC Yc Ayc Axc Ixc Iyc Ixx Iyy Cm2 CM CM Cm3 Cm3 Cm4 Cm4 Cm4 Cm4Frank PascumalNo ratings yet
- Burkert Catalog 2002 Pgs 1 To 44Document44 pagesBurkert Catalog 2002 Pgs 1 To 44Maximiliano Dreyer100% (1)
- Dynamic Response and The Laplace Transform Method: OutlineDocument4 pagesDynamic Response and The Laplace Transform Method: OutlineSimranNo ratings yet
- Dipmeter Image Repair Notes ADocument30 pagesDipmeter Image Repair Notes ARosa K Chang HNo ratings yet
- Out of Body Techniques ManualDocument11 pagesOut of Body Techniques ManualGabriela100% (11)
- I01 ForcesNcomponentsDocument8 pagesI01 ForcesNcomponentsSeverina Mallari0% (1)
- # 6 Kinetic Friction Experiment DiscussionDocument4 pages# 6 Kinetic Friction Experiment DiscussionTauQeer ShahNo ratings yet
- Shell Momentum Balances and Velocity Distributions in Laminar FlowDocument66 pagesShell Momentum Balances and Velocity Distributions in Laminar Flowaprfdyst100% (2)
- Draft Chpt4 Reactive Sensors 1Document35 pagesDraft Chpt4 Reactive Sensors 1Principal OfficeNo ratings yet
- Concept of Settling PDFDocument25 pagesConcept of Settling PDFkasara sreetejNo ratings yet
- Thermodynamics of FreezingDocument4 pagesThermodynamics of Freezingrodrigo nunez100% (1)