
Baja Sae
Baja Sae
You might also like
- The Breakup CureDocument168 pagesThe Breakup CureMladen Muskinja100% (2)
- Self Balancing RobotDocument40 pagesSelf Balancing RobotSpark KnightNo ratings yet
- Circuit Analysis Using Fourier SeriesDocument16 pagesCircuit Analysis Using Fourier SeriesJidan FikriNo ratings yet
- Ee8011 Facts 2marksDocument8 pagesEe8011 Facts 2marksBALAKRISHNAN100% (1)
- Electrical Machine Important 25 MCQ PDFDocument3 pagesElectrical Machine Important 25 MCQ PDFsamyalarunNo ratings yet
- 75 Point Checklist For Staging and PhotographyDocument2 pages75 Point Checklist For Staging and PhotographyFrank KlesitzNo ratings yet
- Acetic Acid ReportDocument5 pagesAcetic Acid Reportyigitilgaz100% (1)
- Cours - Temperature Gradient PDFDocument2 pagesCours - Temperature Gradient PDFtarekhocineNo ratings yet
- SRM Institute of Science & Technology - Academic Curricula (2018 Regulations)Document3 pagesSRM Institute of Science & Technology - Academic Curricula (2018 Regulations)Geetha AnbazhaganNo ratings yet
- Take Electrical Drives MCQ Test & Online Quiz To Test Your KnowledgeDocument4 pagesTake Electrical Drives MCQ Test & Online Quiz To Test Your KnowledgeLokesh ChowdaryNo ratings yet
- Gujarat Technological University: Introduction To Electric VehicleDocument3 pagesGujarat Technological University: Introduction To Electric VehicleKRISHNANo ratings yet
- Applications of 8051 MicrocontrollersDocument23 pagesApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- Electric Vehicle Technology & PolicyDocument2 pagesElectric Vehicle Technology & PolicyEagle Exim Traders100% (1)
- Baja Design ReportDocument17 pagesBaja Design ReportsarthakashNo ratings yet
- Traffic Light ControllerDocument24 pagesTraffic Light Controllerசெல்வம் முத்துராமன்100% (1)
- Electrical Machines-III Question BankDocument9 pagesElectrical Machines-III Question BanksanthiNo ratings yet
- Single Phase Rectifier Fed DC Motor DriveDocument11 pagesSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- Electric Characteristics of Photovoltaic Cells and ModulesDocument15 pagesElectric Characteristics of Photovoltaic Cells and ModulesredwaneNo ratings yet
- Solutions For Assignment - 2Document3 pagesSolutions For Assignment - 2KarthikeyanKarun75% (4)
- Unit 1 QADocument26 pagesUnit 1 QAanbuelectricalNo ratings yet
- Program For Symmetrical Fault AnalysisDocument12 pagesProgram For Symmetrical Fault AnalysisBarathNo ratings yet
- PCB Design Course Syllabus PDFDocument3 pagesPCB Design Course Syllabus PDFvjvijay88No ratings yet
- EHV Question BankDocument1 pageEHV Question BankAniket DusaneNo ratings yet
- Internship KsebDocument97 pagesInternship KsebVishnu VijayaramanNo ratings yet
- Short Notes On Servo MotorDocument2 pagesShort Notes On Servo MotorHimansu Goswami100% (3)
- Sreekavithaengineerig College: Scott Connection of TransformersDocument4 pagesSreekavithaengineerig College: Scott Connection of Transformersmandadi_saileshNo ratings yet
- DSP - Nov 19 Q&a PDFDocument17 pagesDSP - Nov 19 Q&a PDFAnonymous yO7rcec6vuNo ratings yet
- EDC Solar and Battery Powered DrivesDocument20 pagesEDC Solar and Battery Powered DrivesAnonymous xaeuoo4No ratings yet
- Window Space Factor KW - Design of Transformers PDFDocument1 pageWindow Space Factor KW - Design of Transformers PDFnaresh kumarNo ratings yet
- Objective Question Protection and SwitchgearDocument20 pagesObjective Question Protection and SwitchgearRaja Desingu100% (1)
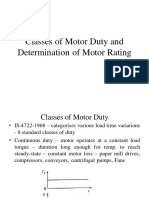
- Classes of Motor DutyDocument20 pagesClasses of Motor DutyvishnuNo ratings yet
- Basic Electrical Engineering (Third Edition) : Tusart. Kanti Nagsarkar Manohar Singh SukhijaDocument2 pagesBasic Electrical Engineering (Third Edition) : Tusart. Kanti Nagsarkar Manohar Singh SukhijaFaisal FarooqNo ratings yet
- Integral and Fractional Slot Windings:: Winding"Document5 pagesIntegral and Fractional Slot Windings:: Winding"manjumtech00342690% (1)
- Train LightingDocument15 pagesTrain LightingNRCM EEENo ratings yet
- Question Bank EE6I MEE 22625 UT-I 261121Document2 pagesQuestion Bank EE6I MEE 22625 UT-I 261121Gajanan VengurlekarNo ratings yet
- HVDC Unit 2Document57 pagesHVDC Unit 2c_h_v_k_rNo ratings yet
- Brushless DC MotorDocument3 pagesBrushless DC MotorSourav KumarNo ratings yet
- Questions 1Document11 pagesQuestions 1anvithaNo ratings yet
- GATE EE 2004 With SolutionsDocument57 pagesGATE EE 2004 With Solutionsamrit40367% (6)
- Evaluation Sheet For The Micro Project (Repaired)Document5 pagesEvaluation Sheet For The Micro Project (Repaired)DEEPSHIKHA PANDEYNo ratings yet
- 2783-AP7101-Advanced Digital Signal ProcessingDocument8 pages2783-AP7101-Advanced Digital Signal ProcessingselvijeganNo ratings yet
- Electrical Machines-I Question BankDocument12 pagesElectrical Machines-I Question BankimmadiuttejNo ratings yet
- EM - Solutions To Question Bank 2022-23Document53 pagesEM - Solutions To Question Bank 2022-23Kubera U100% (2)
- Submitted By:-: Grid-Connected Wind-Photovoltaic Cogeneration Using Back-to-Back Voltage Source ConvertersDocument9 pagesSubmitted By:-: Grid-Connected Wind-Photovoltaic Cogeneration Using Back-to-Back Voltage Source ConvertersThulasi PrasadNo ratings yet
- Question Bank EE6I MEE 22625 UT-II 261121Document2 pagesQuestion Bank EE6I MEE 22625 UT-II 26112152. YASHRAJ RANSHURNo ratings yet
- Interfacing Stepper Motor With 8085Document9 pagesInterfacing Stepper Motor With 8085Ranjith Kasu100% (2)
- 3 Hours / 70 Marks: Seat NoDocument4 pages3 Hours / 70 Marks: Seat Nosourabh patil100% (1)
- Unit I - MCQs (Bank 2)Document5 pagesUnit I - MCQs (Bank 2)AbhijeetNo ratings yet
- Mahatransco AE Electrical Previous Year Paper 22 December 2023Document19 pagesMahatransco AE Electrical Previous Year Paper 22 December 2023satishkagdeNo ratings yet
- 1-17 - Kale and Khandare Engine Data BookDocument17 pages1-17 - Kale and Khandare Engine Data BookTEJ SAKPALNo ratings yet
- Bee Viva QueDocument3 pagesBee Viva QueVijayramraj Mocherla40% (5)
- Luo ConverterDocument6 pagesLuo ConverterAndrei CocorNo ratings yet
- BEEE 2marks (With Ans)Document25 pagesBEEE 2marks (With Ans)Nanda SubramanianNo ratings yet
- Poster PresentationDocument1 pagePoster Presentationkiran panditNo ratings yet
- Turbomachines by Valan ArsuDocument241 pagesTurbomachines by Valan Arsuharrrypotter20No ratings yet
- Potentiometric Error DetectorDocument16 pagesPotentiometric Error DetectorAryan Batra100% (1)
- Four Quadrant Operation of IM Using H - BridgeDocument5 pagesFour Quadrant Operation of IM Using H - Bridgesomnath bhongNo ratings yet
- Sample Question Paper Basic Electrical & Electronics EngineeringDocument4 pagesSample Question Paper Basic Electrical & Electronics Engineeringsachin tupeNo ratings yet
- Automatic Fault Detection and Protection of Three Phase Induction MotorDocument65 pagesAutomatic Fault Detection and Protection of Three Phase Induction Motordivya kambleNo ratings yet
- اعطال الموتوراتDocument65 pagesاعطال الموتوراتmoathNo ratings yet
- CHIGBU JOSHUA EZEUGO PDF_062701Document53 pagesCHIGBU JOSHUA EZEUGO PDF_062701Nnaemeka NzenwataNo ratings yet
- Department of Electrical Engineering: Project ReportDocument50 pagesDepartment of Electrical Engineering: Project Reportspark instituteNo ratings yet
- Designing Indoor Solar Products: Photovoltaic Technologies for AESFrom EverandDesigning Indoor Solar Products: Photovoltaic Technologies for AESNo ratings yet
- BITH203 Computer Repair and MaintenanceDocument191 pagesBITH203 Computer Repair and MaintenanceNyashaNo ratings yet
- Premio 20 DTDocument35 pagesPremio 20 DThyakueNo ratings yet
- Unitarity Constraints in The Two Higgs Doublet ModelDocument5 pagesUnitarity Constraints in The Two Higgs Doublet ModelAndres Castillo RNo ratings yet
- Progress Certificates: Pt. Guntur Wijaya AbadiDocument1 pageProgress Certificates: Pt. Guntur Wijaya AbadiTrefastoreNo ratings yet
- Alamine 304 052523Document7 pagesAlamine 304 052523Loisse GrimaldoNo ratings yet
- Basic Electrical Engineering SyllabusDocument5 pagesBasic Electrical Engineering SyllabusCatherine Salvador0% (1)
- Panchatantra Stories - 2Document3 pagesPanchatantra Stories - 2DeepikaNo ratings yet
- A Critical Review On Different Types of Wear of MaterialsDocument7 pagesA Critical Review On Different Types of Wear of MaterialsIAEME PublicationNo ratings yet
- Reaper User Guide 472 CDocument416 pagesReaper User Guide 472 CAndrew CochranNo ratings yet
- Development of A Smart Garment For The Assessment of Cardiac Mechanical Performance and Other Vital Signs During Sleep in MicrogravityDocument9 pagesDevelopment of A Smart Garment For The Assessment of Cardiac Mechanical Performance and Other Vital Signs During Sleep in MicrogravitynarykNo ratings yet
- Project Management Assignment ImprovemenDocument29 pagesProject Management Assignment ImprovemenSyed Umair AshrafNo ratings yet
- Newton's Law of Universal Gravitation (Physics)Document43 pagesNewton's Law of Universal Gravitation (Physics)Maryanne100% (1)
- Chocolate Bar by Venelopa ToysDocument29 pagesChocolate Bar by Venelopa ToysMarcela Murillo100% (2)
- 11 Micro NutritionDocument71 pages11 Micro NutritionSumit RaiNo ratings yet
- Story of Siachen-1Document28 pagesStory of Siachen-1Henish KananiNo ratings yet
- Radiology in A Trench Coat PDFDocument238 pagesRadiology in A Trench Coat PDFAnantha KrishnanNo ratings yet
- MAR 20 2Q15:: Department of Public Works and HighwaysDocument6 pagesMAR 20 2Q15:: Department of Public Works and HighwaysFaustino AbadNo ratings yet
- 1 Heat Exchanger VDFDocument26 pages1 Heat Exchanger VDFPablo TorresNo ratings yet
- J28475 Galnorth Presentation Royal BafokengDocument17 pagesJ28475 Galnorth Presentation Royal BafokengLeeLowersNo ratings yet
- Lecture 6 SamplingDocument54 pagesLecture 6 SamplingPeter Makara100% (1)
- Cirrus 5 Oxygen Concentrator Manual: Important: Make Sure You Read and Understand All of The InformationDocument21 pagesCirrus 5 Oxygen Concentrator Manual: Important: Make Sure You Read and Understand All of The Informationmario pulido benitezNo ratings yet
- Filipino Inventors and Filipino ScientistsDocument25 pagesFilipino Inventors and Filipino ScientistsChristopher Jordan JustoNo ratings yet
- Passage 1: Mukesh AmbaniDocument4 pagesPassage 1: Mukesh AmbaniThảo VyNo ratings yet
- Design of Rigid Pavement CC Road With M25Document5 pagesDesign of Rigid Pavement CC Road With M25pravincs_007No ratings yet
- The Future of Renewable Energy: Solar, Wind, and BeyondDocument1 pageThe Future of Renewable Energy: Solar, Wind, and Beyondtiticelestin98No ratings yet
- Evaluation of IEEE 57 Bus System For Optimal Power Flow AnalysisDocument5 pagesEvaluation of IEEE 57 Bus System For Optimal Power Flow AnalysisAnkur MaheshwariNo ratings yet
























































































Download as docx, pdf, or txt
You might also like
- The Breakup CureDocument168 pagesThe Breakup CureMladen Muskinja100% (2)
- Self Balancing RobotDocument40 pagesSelf Balancing RobotSpark KnightNo ratings yet
- Circuit Analysis Using Fourier SeriesDocument16 pagesCircuit Analysis Using Fourier SeriesJidan FikriNo ratings yet
- Ee8011 Facts 2marksDocument8 pagesEe8011 Facts 2marksBALAKRISHNAN100% (1)
- Electrical Machine Important 25 MCQ PDFDocument3 pagesElectrical Machine Important 25 MCQ PDFsamyalarunNo ratings yet
- 75 Point Checklist For Staging and PhotographyDocument2 pages75 Point Checklist For Staging and PhotographyFrank KlesitzNo ratings yet
- Acetic Acid ReportDocument5 pagesAcetic Acid Reportyigitilgaz100% (1)
- Cours - Temperature Gradient PDFDocument2 pagesCours - Temperature Gradient PDFtarekhocineNo ratings yet
- SRM Institute of Science & Technology - Academic Curricula (2018 Regulations)Document3 pagesSRM Institute of Science & Technology - Academic Curricula (2018 Regulations)Geetha AnbazhaganNo ratings yet
- Take Electrical Drives MCQ Test & Online Quiz To Test Your KnowledgeDocument4 pagesTake Electrical Drives MCQ Test & Online Quiz To Test Your KnowledgeLokesh ChowdaryNo ratings yet
- Gujarat Technological University: Introduction To Electric VehicleDocument3 pagesGujarat Technological University: Introduction To Electric VehicleKRISHNANo ratings yet
- Applications of 8051 MicrocontrollersDocument23 pagesApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- Electric Vehicle Technology & PolicyDocument2 pagesElectric Vehicle Technology & PolicyEagle Exim Traders100% (1)
- Baja Design ReportDocument17 pagesBaja Design ReportsarthakashNo ratings yet
- Traffic Light ControllerDocument24 pagesTraffic Light Controllerசெல்வம் முத்துராமன்100% (1)
- Electrical Machines-III Question BankDocument9 pagesElectrical Machines-III Question BanksanthiNo ratings yet
- Single Phase Rectifier Fed DC Motor DriveDocument11 pagesSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- Electric Characteristics of Photovoltaic Cells and ModulesDocument15 pagesElectric Characteristics of Photovoltaic Cells and ModulesredwaneNo ratings yet
- Solutions For Assignment - 2Document3 pagesSolutions For Assignment - 2KarthikeyanKarun75% (4)
- Unit 1 QADocument26 pagesUnit 1 QAanbuelectricalNo ratings yet
- Program For Symmetrical Fault AnalysisDocument12 pagesProgram For Symmetrical Fault AnalysisBarathNo ratings yet
- PCB Design Course Syllabus PDFDocument3 pagesPCB Design Course Syllabus PDFvjvijay88No ratings yet
- EHV Question BankDocument1 pageEHV Question BankAniket DusaneNo ratings yet
- Internship KsebDocument97 pagesInternship KsebVishnu VijayaramanNo ratings yet
- Short Notes On Servo MotorDocument2 pagesShort Notes On Servo MotorHimansu Goswami100% (3)
- Sreekavithaengineerig College: Scott Connection of TransformersDocument4 pagesSreekavithaengineerig College: Scott Connection of Transformersmandadi_saileshNo ratings yet
- DSP - Nov 19 Q&a PDFDocument17 pagesDSP - Nov 19 Q&a PDFAnonymous yO7rcec6vuNo ratings yet
- EDC Solar and Battery Powered DrivesDocument20 pagesEDC Solar and Battery Powered DrivesAnonymous xaeuoo4No ratings yet
- Window Space Factor KW - Design of Transformers PDFDocument1 pageWindow Space Factor KW - Design of Transformers PDFnaresh kumarNo ratings yet
- Objective Question Protection and SwitchgearDocument20 pagesObjective Question Protection and SwitchgearRaja Desingu100% (1)
- Classes of Motor DutyDocument20 pagesClasses of Motor DutyvishnuNo ratings yet
- Basic Electrical Engineering (Third Edition) : Tusart. Kanti Nagsarkar Manohar Singh SukhijaDocument2 pagesBasic Electrical Engineering (Third Edition) : Tusart. Kanti Nagsarkar Manohar Singh SukhijaFaisal FarooqNo ratings yet
- Integral and Fractional Slot Windings:: Winding"Document5 pagesIntegral and Fractional Slot Windings:: Winding"manjumtech00342690% (1)
- Train LightingDocument15 pagesTrain LightingNRCM EEENo ratings yet
- Question Bank EE6I MEE 22625 UT-I 261121Document2 pagesQuestion Bank EE6I MEE 22625 UT-I 261121Gajanan VengurlekarNo ratings yet
- HVDC Unit 2Document57 pagesHVDC Unit 2c_h_v_k_rNo ratings yet
- Brushless DC MotorDocument3 pagesBrushless DC MotorSourav KumarNo ratings yet
- Questions 1Document11 pagesQuestions 1anvithaNo ratings yet
- GATE EE 2004 With SolutionsDocument57 pagesGATE EE 2004 With Solutionsamrit40367% (6)
- Evaluation Sheet For The Micro Project (Repaired)Document5 pagesEvaluation Sheet For The Micro Project (Repaired)DEEPSHIKHA PANDEYNo ratings yet
- 2783-AP7101-Advanced Digital Signal ProcessingDocument8 pages2783-AP7101-Advanced Digital Signal ProcessingselvijeganNo ratings yet
- Electrical Machines-I Question BankDocument12 pagesElectrical Machines-I Question BankimmadiuttejNo ratings yet
- EM - Solutions To Question Bank 2022-23Document53 pagesEM - Solutions To Question Bank 2022-23Kubera U100% (2)
- Submitted By:-: Grid-Connected Wind-Photovoltaic Cogeneration Using Back-to-Back Voltage Source ConvertersDocument9 pagesSubmitted By:-: Grid-Connected Wind-Photovoltaic Cogeneration Using Back-to-Back Voltage Source ConvertersThulasi PrasadNo ratings yet
- Question Bank EE6I MEE 22625 UT-II 261121Document2 pagesQuestion Bank EE6I MEE 22625 UT-II 26112152. YASHRAJ RANSHURNo ratings yet
- Interfacing Stepper Motor With 8085Document9 pagesInterfacing Stepper Motor With 8085Ranjith Kasu100% (2)
- 3 Hours / 70 Marks: Seat NoDocument4 pages3 Hours / 70 Marks: Seat Nosourabh patil100% (1)
- Unit I - MCQs (Bank 2)Document5 pagesUnit I - MCQs (Bank 2)AbhijeetNo ratings yet
- Mahatransco AE Electrical Previous Year Paper 22 December 2023Document19 pagesMahatransco AE Electrical Previous Year Paper 22 December 2023satishkagdeNo ratings yet
- 1-17 - Kale and Khandare Engine Data BookDocument17 pages1-17 - Kale and Khandare Engine Data BookTEJ SAKPALNo ratings yet
- Bee Viva QueDocument3 pagesBee Viva QueVijayramraj Mocherla40% (5)
- Luo ConverterDocument6 pagesLuo ConverterAndrei CocorNo ratings yet
- BEEE 2marks (With Ans)Document25 pagesBEEE 2marks (With Ans)Nanda SubramanianNo ratings yet
- Poster PresentationDocument1 pagePoster Presentationkiran panditNo ratings yet
- Turbomachines by Valan ArsuDocument241 pagesTurbomachines by Valan Arsuharrrypotter20No ratings yet
- Potentiometric Error DetectorDocument16 pagesPotentiometric Error DetectorAryan Batra100% (1)
- Four Quadrant Operation of IM Using H - BridgeDocument5 pagesFour Quadrant Operation of IM Using H - Bridgesomnath bhongNo ratings yet
- Sample Question Paper Basic Electrical & Electronics EngineeringDocument4 pagesSample Question Paper Basic Electrical & Electronics Engineeringsachin tupeNo ratings yet
- Automatic Fault Detection and Protection of Three Phase Induction MotorDocument65 pagesAutomatic Fault Detection and Protection of Three Phase Induction Motordivya kambleNo ratings yet
- اعطال الموتوراتDocument65 pagesاعطال الموتوراتmoathNo ratings yet
- CHIGBU JOSHUA EZEUGO PDF_062701Document53 pagesCHIGBU JOSHUA EZEUGO PDF_062701Nnaemeka NzenwataNo ratings yet
- Department of Electrical Engineering: Project ReportDocument50 pagesDepartment of Electrical Engineering: Project Reportspark instituteNo ratings yet
- Designing Indoor Solar Products: Photovoltaic Technologies for AESFrom EverandDesigning Indoor Solar Products: Photovoltaic Technologies for AESNo ratings yet
- BITH203 Computer Repair and MaintenanceDocument191 pagesBITH203 Computer Repair and MaintenanceNyashaNo ratings yet
- Premio 20 DTDocument35 pagesPremio 20 DThyakueNo ratings yet
- Unitarity Constraints in The Two Higgs Doublet ModelDocument5 pagesUnitarity Constraints in The Two Higgs Doublet ModelAndres Castillo RNo ratings yet
- Progress Certificates: Pt. Guntur Wijaya AbadiDocument1 pageProgress Certificates: Pt. Guntur Wijaya AbadiTrefastoreNo ratings yet
- Alamine 304 052523Document7 pagesAlamine 304 052523Loisse GrimaldoNo ratings yet
- Basic Electrical Engineering SyllabusDocument5 pagesBasic Electrical Engineering SyllabusCatherine Salvador0% (1)
- Panchatantra Stories - 2Document3 pagesPanchatantra Stories - 2DeepikaNo ratings yet
- A Critical Review On Different Types of Wear of MaterialsDocument7 pagesA Critical Review On Different Types of Wear of MaterialsIAEME PublicationNo ratings yet
- Reaper User Guide 472 CDocument416 pagesReaper User Guide 472 CAndrew CochranNo ratings yet
- Development of A Smart Garment For The Assessment of Cardiac Mechanical Performance and Other Vital Signs During Sleep in MicrogravityDocument9 pagesDevelopment of A Smart Garment For The Assessment of Cardiac Mechanical Performance and Other Vital Signs During Sleep in MicrogravitynarykNo ratings yet
- Project Management Assignment ImprovemenDocument29 pagesProject Management Assignment ImprovemenSyed Umair AshrafNo ratings yet
- Newton's Law of Universal Gravitation (Physics)Document43 pagesNewton's Law of Universal Gravitation (Physics)Maryanne100% (1)
- Chocolate Bar by Venelopa ToysDocument29 pagesChocolate Bar by Venelopa ToysMarcela Murillo100% (2)
- 11 Micro NutritionDocument71 pages11 Micro NutritionSumit RaiNo ratings yet
- Story of Siachen-1Document28 pagesStory of Siachen-1Henish KananiNo ratings yet
- Radiology in A Trench Coat PDFDocument238 pagesRadiology in A Trench Coat PDFAnantha KrishnanNo ratings yet
- MAR 20 2Q15:: Department of Public Works and HighwaysDocument6 pagesMAR 20 2Q15:: Department of Public Works and HighwaysFaustino AbadNo ratings yet
- 1 Heat Exchanger VDFDocument26 pages1 Heat Exchanger VDFPablo TorresNo ratings yet
- J28475 Galnorth Presentation Royal BafokengDocument17 pagesJ28475 Galnorth Presentation Royal BafokengLeeLowersNo ratings yet
- Lecture 6 SamplingDocument54 pagesLecture 6 SamplingPeter Makara100% (1)
- Cirrus 5 Oxygen Concentrator Manual: Important: Make Sure You Read and Understand All of The InformationDocument21 pagesCirrus 5 Oxygen Concentrator Manual: Important: Make Sure You Read and Understand All of The Informationmario pulido benitezNo ratings yet
- Filipino Inventors and Filipino ScientistsDocument25 pagesFilipino Inventors and Filipino ScientistsChristopher Jordan JustoNo ratings yet
- Passage 1: Mukesh AmbaniDocument4 pagesPassage 1: Mukesh AmbaniThảo VyNo ratings yet
- Design of Rigid Pavement CC Road With M25Document5 pagesDesign of Rigid Pavement CC Road With M25pravincs_007No ratings yet
- The Future of Renewable Energy: Solar, Wind, and BeyondDocument1 pageThe Future of Renewable Energy: Solar, Wind, and Beyondtiticelestin98No ratings yet
- Evaluation of IEEE 57 Bus System For Optimal Power Flow AnalysisDocument5 pagesEvaluation of IEEE 57 Bus System For Optimal Power Flow AnalysisAnkur MaheshwariNo ratings yet