Download as pdf or txt
You might also like
- Department of Electrical Engineering: Riphah College of Science & Technology Faculty of Engineering & Applied SciencesDocument6 pagesDepartment of Electrical Engineering: Riphah College of Science & Technology Faculty of Engineering & Applied Sciencesallrounder fightNo ratings yet
- Speed-Sensorless Estimation For Induction Motors Using Extended Kalman FiltersDocument9 pagesSpeed-Sensorless Estimation For Induction Motors Using Extended Kalman Filtersosmar_douradoNo ratings yet
- Design and Low Cost Implementation of AnDocument12 pagesDesign and Low Cost Implementation of Analex EdwinsonNo ratings yet
- Adaptive Input-OutputDocument10 pagesAdaptive Input-Outputmail2pramod86No ratings yet
- Field Oriented Control of Ac Motor - ReportDocument9 pagesField Oriented Control of Ac Motor - ReportKesri Nath TiwariNo ratings yet
- Sensor-Less Field Oriented Control of Wind TurbineDocument11 pagesSensor-Less Field Oriented Control of Wind TurbinegiovanniNo ratings yet
- Sensorless Control of Induction-Motor Drive Based On Robust Kalman Filter and Adaptive Speed EstimationDocument10 pagesSensorless Control of Induction-Motor Drive Based On Robust Kalman Filter and Adaptive Speed EstimationPonnilavan SibiNo ratings yet
- Recursive Identification of Induction Motor Parameters - 2004Document19 pagesRecursive Identification of Induction Motor Parameters - 2004leosensNo ratings yet
- Adaptive Sliding-Mode Observer For Speed-Sensorless Control of Induction MotorsDocument8 pagesAdaptive Sliding-Mode Observer For Speed-Sensorless Control of Induction MotorsUma SathyadevanNo ratings yet
- Stator Resistance and Speed Estimation For Induction Motor Drives As Influenced by SaturationDocument9 pagesStator Resistance and Speed Estimation For Induction Motor Drives As Influenced by Saturationalaaa3No ratings yet
- Speed Estimation of Vector Controlled Three-Phase Induction Motor Under Four-Quadrant Operation Using Stator Currents and VoltagesDocument5 pagesSpeed Estimation of Vector Controlled Three-Phase Induction Motor Under Four-Quadrant Operation Using Stator Currents and VoltagesTuấn Anh ĐinhNo ratings yet
- Sliding Mode Control of Induction Motor ThesisDocument6 pagesSliding Mode Control of Induction Motor Thesiss0kuzej0byn2100% (2)
- Pemd2008 ShadyDocument5 pagesPemd2008 ShadySorin DeleanuNo ratings yet
- Improved Velocity Estimation For Low-Speed and Transient Regimes Using Low-Resolution EncodersDocument8 pagesImproved Velocity Estimation For Low-Speed and Transient Regimes Using Low-Resolution EncodersLÊ ĐẠI HIỆPNo ratings yet
- Energies: New Sensorless Speed Control of A Hybrid Stepper Motor Based On Fuzzy Sliding Mode ObserverDocument19 pagesEnergies: New Sensorless Speed Control of A Hybrid Stepper Motor Based On Fuzzy Sliding Mode ObserverTrần Tấn LộcNo ratings yet
- Model-Based Sensorless Control of An IPMSM With Enhanced Robustness Against Load Disturbances Based On Position and Speed Estimator Using A Speed ErrorDocument12 pagesModel-Based Sensorless Control of An IPMSM With Enhanced Robustness Against Load Disturbances Based On Position and Speed Estimator Using A Speed Errorsudheer307klceNo ratings yet
- Comparison of The Speedy Estimate Methods of The Induction MotorsDocument12 pagesComparison of The Speedy Estimate Methods of The Induction MotorsTELKOMNIKANo ratings yet
- Design and Implementation of The Extended Kalman Filter For The Speed and Rotor Position Estimation of Brushless DC MotorDocument9 pagesDesign and Implementation of The Extended Kalman Filter For The Speed and Rotor Position Estimation of Brushless DC MotorSoujanya VinnakotaNo ratings yet
- Paper 15-A Review On Parameters Identification Methods For Asynchronous MotorDocument6 pagesPaper 15-A Review On Parameters Identification Methods For Asynchronous MotorAldemar GonzalezNo ratings yet
- Sensorless Vector Controller For A Synchronous Reluctance MotorDocument9 pagesSensorless Vector Controller For A Synchronous Reluctance MotorUma SathyadevanNo ratings yet
- Low-Cost Accelerometers For Robotic Manipulator PerceptionDocument7 pagesLow-Cost Accelerometers For Robotic Manipulator PerceptionAbbé BusoniNo ratings yet
- Sensorless Field OrientedDocument8 pagesSensorless Field Orientedmv1970No ratings yet
- EKF Applied To BLDCDocument9 pagesEKF Applied To BLDCUma SathyadevanNo ratings yet
- Sensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.irDocument8 pagesSensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.ira1690074No ratings yet
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- Effective Estimation of Speed and Rotor Position of A PM Synchronous Motor Drive by A Kalman FiltDocument7 pagesEffective Estimation of Speed and Rotor Position of A PM Synchronous Motor Drive by A Kalman FiltAli H. NumanNo ratings yet
- Energies 11 03517Document21 pagesEnergies 11 03517Hemanth KumarNo ratings yet
- Energies 11 02886Document16 pagesEnergies 11 02886Trần Tấn LộcNo ratings yet
- Crossmark: Control Engineering PracticeDocument13 pagesCrossmark: Control Engineering PracticeLê Đức ThịnhNo ratings yet
- Sensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverDocument7 pagesSensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverWalid AbidNo ratings yet
- Robust Observer Design For Sensorless Voltage and Frequency Control of A Doubly Fed Induction Generator in Standalone ModeDocument11 pagesRobust Observer Design For Sensorless Voltage and Frequency Control of A Doubly Fed Induction Generator in Standalone ModeMohammed Saci ChabaniNo ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- Ijream PaperDocument8 pagesIjream PaperJimsNo ratings yet
- Fast Flux Linkage Measurement For Switched Reluctance Motors Excluding Rotor Clamping Devices and Position SensorsDocument7 pagesFast Flux Linkage Measurement For Switched Reluctance Motors Excluding Rotor Clamping Devices and Position SensorsLalbahadur MajhiNo ratings yet
- IMP - Automated Lane Change Controller DesignDocument10 pagesIMP - Automated Lane Change Controller Designjohncena3No ratings yet
- NewNov2016 ModelingandParameterIdentificationofDCMotor PDFDocument12 pagesNewNov2016 ModelingandParameterIdentificationofDCMotor PDFゞ『HaiDerツ98〆No ratings yet
- 1 s2.0 S0196890410003560 Main PDFDocument12 pages1 s2.0 S0196890410003560 Main PDFSelami AslanNo ratings yet
- Speed and Parameter Identification For Sensorless Vector Control of Induction Motors at Very Low SpeedDocument21 pagesSpeed and Parameter Identification For Sensorless Vector Control of Induction Motors at Very Low SpeedAli AldosNo ratings yet
- PI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM DrivesDocument11 pagesPI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM Drivesrizk86No ratings yet
- Parameter Estimation For Electric Motor Condition MonitoringDocument12 pagesParameter Estimation For Electric Motor Condition MonitoringNatarajNo ratings yet
- On Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerDocument8 pagesOn Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerRaja ReddyNo ratings yet
- Fuzzy Sliding Mode Control of A Switched ReluctancDocument8 pagesFuzzy Sliding Mode Control of A Switched ReluctancTejas PanchalNo ratings yet
- 1 s2.0 S0888327014001332 Main PDFDocument15 pages1 s2.0 S0888327014001332 Main PDFbasic joNo ratings yet
- A MRAS-based Stator Resistance and Speed Estimation For Sensorless IPMSMDocument15 pagesA MRAS-based Stator Resistance and Speed Estimation For Sensorless IPMSMmusty38No ratings yet
- Sensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed EstimatorDocument9 pagesSensorless Vector Control of Induction Motor Using Direct Adaptive RNN Speed Estimatormechernene_aek9037No ratings yet
- Model Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveDocument9 pagesModel Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Rotor Speed-Based Bearing Fault Diagnosis (RSB-BFD) Under Variable SpeedDocument10 pagesRotor Speed-Based Bearing Fault Diagnosis (RSB-BFD) Under Variable SpeedKunal JoshiNo ratings yet
- Current and Speed Sensor Fault Diagnosis Method Applied To Induction Motor Drive - Paper IEEE Access 2021Document13 pagesCurrent and Speed Sensor Fault Diagnosis Method Applied To Induction Motor Drive - Paper IEEE Access 2021cuongNo ratings yet
- Identification of Variable Frequency Induction Motor Models From Operating DataDocument8 pagesIdentification of Variable Frequency Induction Motor Models From Operating Datani60No ratings yet
- Identification of The Machine Parameters IN Vector Controlled Induction Motor DriveDocument6 pagesIdentification of The Machine Parameters IN Vector Controlled Induction Motor DriveBelkacem BerrehailNo ratings yet
- New Sensor LessDocument10 pagesNew Sensor LessAbhishek AgarwalNo ratings yet
- Artificial Neural Network Based Speed and Torque Control of Three Phase Induction MotorDocument4 pagesArtificial Neural Network Based Speed and Torque Control of Three Phase Induction MotorIjsrnet EditorialNo ratings yet
- EV Sukanta DasDocument12 pagesEV Sukanta DasShadNo ratings yet
- Điều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiDocument10 pagesĐiều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiNguyễn Văn HoàNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Induction Motor (IM) - Controls and Flux Estimations: Presented By: Dr. Manoj Datta Dept. of Human and Information SystemsDocument82 pagesInduction Motor (IM) - Controls and Flux Estimations: Presented By: Dr. Manoj Datta Dept. of Human and Information Systemsswapno_akashNo ratings yet
- 4 UnbalanceDocument9 pages4 Unbalancerola mohamedNo ratings yet
- PSO Based RP-MRAS Estimator For 3ph IMDocument30 pagesPSO Based RP-MRAS Estimator For 3ph IMSalim AhmedNo ratings yet
- A Physically Insightful Approach To The Design and Accuracy Assessment of Flux Observers For Field Oriented Induction Machine DrivesDocument8 pagesA Physically Insightful Approach To The Design and Accuracy Assessment of Flux Observers For Field Oriented Induction Machine Drivesapi-3826450100% (1)
- Current Reconstruction-3 PDFDocument8 pagesCurrent Reconstruction-3 PDFmanas jenaNo ratings yet
- Thesis PMSMDocument87 pagesThesis PMSMmanas jenaNo ratings yet
- ATV12H018M2: Product Data SheetDocument2 pagesATV12H018M2: Product Data Sheetmanas jenaNo ratings yet
- 1Document30 pages1manas jenaNo ratings yet
- Dasar OpampDocument54 pagesDasar OpampMaulana HidayatullahNo ratings yet
- Bridge'sDocument2 pagesBridge'snar11No ratings yet
- ElectromagnetismDocument3 pagesElectromagnetismazurillmarill3734No ratings yet
- Ansi Ieee C37.101 19931Document60 pagesAnsi Ieee C37.101 19931Wilmar Andres Martinez100% (1)
- Kenwood KAC-9103DDocument14 pagesKenwood KAC-9103DDragan CvetkovicNo ratings yet
- The Story of Electricity - A.K.chakraborty, S.C.bhattacharyaDocument90 pagesThe Story of Electricity - A.K.chakraborty, S.C.bhattacharyaGEMMA PUIG100% (1)
- Sm-A305f SVC ManualDocument172 pagesSm-A305f SVC ManualAngel Leon100% (1)
- Manual DL - 3155m07 Go Ing - Ver 2008Document84 pagesManual DL - 3155m07 Go Ing - Ver 2008ancabausNo ratings yet
- S ParametersDocument36 pagesS ParametersRegginNo ratings yet
- 06 G482 ALL QuestionsDocument244 pages06 G482 ALL QuestionsBin RenNo ratings yet
- Importance and Conduct of Grid Impact StudyDocument24 pagesImportance and Conduct of Grid Impact StudyJCuchapinNo ratings yet
- AQU4518R0Document2 pagesAQU4518R0Jose ParadaNo ratings yet
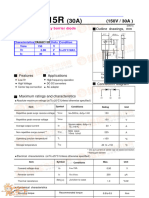
- YA868C15R: High Voltage Schottky Barrier DiodeDocument3 pagesYA868C15R: High Voltage Schottky Barrier DiodeleventtozkoparanNo ratings yet
- Question Bank For Electric DrivesDocument10 pagesQuestion Bank For Electric DrivesPradosh100% (1)
- Exp 1 Amplitude Modulation and DemodulationDocument17 pagesExp 1 Amplitude Modulation and DemodulationOhidul IslamNo ratings yet
- Ogale's Learn With Fun Electricity Kit HandbookDocument15 pagesOgale's Learn With Fun Electricity Kit HandbookUdita OgaleNo ratings yet
- Manual Phonic 3000Document32 pagesManual Phonic 3000Luis Daniel Gutierrez PertuzNo ratings yet
- FHSC1034 T8 AdditionalDocument6 pagesFHSC1034 T8 AdditionalTZSheng100% (1)
- VIC EDH - Catalog - Data Sheet - 01Document38 pagesVIC EDH - Catalog - Data Sheet - 01Zubair KhanNo ratings yet
- SMC 60Document1 pageSMC 60JuppehupNo ratings yet
- Capitolo 22 GB - Metering Instruments - LOVATODocument48 pagesCapitolo 22 GB - Metering Instruments - LOVATOCiprian DemianNo ratings yet
- CDG 6000Document31 pagesCDG 6000Alex AlexNo ratings yet
- Pioneer Deh 3100r Deh 3130rDocument69 pagesPioneer Deh 3100r Deh 3130revagualdaNo ratings yet
- Presentation On Theme: "EXTERNAL ALARMS AT BTS SITES" - Presentation TranscriptDocument3 pagesPresentation On Theme: "EXTERNAL ALARMS AT BTS SITES" - Presentation TranscriptJabulani LunguNo ratings yet
- Senior Design Project IdeasDocument8 pagesSenior Design Project IdeasTanzir Bin Razzaque 1831914042No ratings yet
- Signal Transformer 241Document2 pagesSignal Transformer 241NavnetNo ratings yet
- DriverDocument2 pagesDriverDeepak LaserNo ratings yet
- 10 Sme-RrDocument2 pages10 Sme-RrprakashebhangaleNo ratings yet
- Cryogenic Electronics: Poles and ZerosDocument1 pageCryogenic Electronics: Poles and ZerosMadhu JbNo ratings yet