Download as pdf or txt
You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Design and Analysis of Differential GearboxDocument49 pagesDesign and Analysis of Differential GearboxLakshmiprasad Kadari50% (4)
- Discussion 1Document19 pagesDiscussion 1Praveen P JoseNo ratings yet
- Detroit Type of AutomationDocument73 pagesDetroit Type of Automationvinay846458% (12)
- 3200AMMe Part 2Document224 pages3200AMMe Part 2Tanja KesicNo ratings yet
- Lecture 13Document40 pagesLecture 13nadia_shuhada_2No ratings yet
- Kindexing MechanismsDocument7 pagesKindexing MechanismsSMBEAUTYNo ratings yet
- Automation in Machining Case StudyDocument10 pagesAutomation in Machining Case StudyspicykeyurNo ratings yet
- Termpaper: Different Mechanism Used in Industries CODE:MEC101Document13 pagesTermpaper: Different Mechanism Used in Industries CODE:MEC101Tejpal SinghNo ratings yet
- Unit 5 Automated Asssembly SystemsDocument32 pagesUnit 5 Automated Asssembly SystemsAli FikarNo ratings yet
- Advantages of Geneva MechanismDocument2 pagesAdvantages of Geneva MechanismMersal PavanNo ratings yet
- Transfer Devices and Feeders: Industrial AutomationDocument18 pagesTransfer Devices and Feeders: Industrial Automationdeepakeme60No ratings yet
- Astomated Assembly SystemDocument32 pagesAstomated Assembly SystemmohitNo ratings yet
- Robotics Chapter 9 - Assembly AutomationDocument9 pagesRobotics Chapter 9 - Assembly Automationtutorfelix777No ratings yet
- Automatic Tool Changer (ATC)Document11 pagesAutomatic Tool Changer (ATC)Diwakar PrasadNo ratings yet
- Transfer Lines and Similar Automated Manufacturing SystemDocument26 pagesTransfer Lines and Similar Automated Manufacturing Systemsnjypraja100% (2)
- Mini Conveyor Using Geneva MechanismDocument3 pagesMini Conveyor Using Geneva MechanismLokeshvarma RNo ratings yet
- Automatic Paper Cutting Machine Using Geneva Mechanism PDFDocument8 pagesAutomatic Paper Cutting Machine Using Geneva Mechanism PDFNoor Islam100% (1)
- Automatic Paper Cutting Machine Using Geneva Mechanism: Sunil H V, Ankit Yadav, Shivu L, Santosh ChoudriDocument8 pagesAutomatic Paper Cutting Machine Using Geneva Mechanism: Sunil H V, Ankit Yadav, Shivu L, Santosh ChoudriNoor IslamNo ratings yet
- Low Cost Automation For Manufacturing of Conveyor Chain BushesDocument6 pagesLow Cost Automation For Manufacturing of Conveyor Chain BushesRobinson PrabuNo ratings yet
- UntitledDocument56 pagesUntitledSarumathySundaramNo ratings yet
- Automated Flow LinesDocument18 pagesAutomated Flow LinesTanweerNo ratings yet
- 0620Document7 pages0620Shahrzad GhasemiNo ratings yet
- Unit 2Document64 pagesUnit 2piyush.foruppoNo ratings yet
- Bent ShaftDocument17 pagesBent ShaftD-10-Ghodake-ShubhamNo ratings yet
- Design and Fabrication of Step Feeder Automation MDocument10 pagesDesign and Fabrication of Step Feeder Automation MJesslyne CheniaNo ratings yet
- Chapter2-Automation System in IndustryDocument31 pagesChapter2-Automation System in IndustryAbdul Razzi0% (1)
- Semi Automatic Lathe Machine Using ARM ProcessorDocument7 pagesSemi Automatic Lathe Machine Using ARM ProcessorIRJIENo ratings yet
- An Introduction To Plug-and-Play Motion SubsystemsDocument5 pagesAn Introduction To Plug-and-Play Motion SubsystemsIlija BozovicNo ratings yet
- Am Unit - 2Document19 pagesAm Unit - 2Sravanth KondetiNo ratings yet
- Assignment AutomationDocument6 pagesAssignment AutomationHazznel KameriNo ratings yet
- MPrathyusha PMounica GKalyani GPrashanthi VenkataPhaniBabuV 30Document9 pagesMPrathyusha PMounica GKalyani GPrashanthi VenkataPhaniBabuV 30Anonymous kZswaZ69oNo ratings yet
- MNE 3046 Part 1Document68 pagesMNE 3046 Part 1ChunMan SitNo ratings yet
- Unit 2 Automated Flow LinesDocument21 pagesUnit 2 Automated Flow Linesraam100% (1)
- Automated Flow Lines AnswersDocument8 pagesAutomated Flow Lines AnswersAnmol SetiaNo ratings yet
- CNC Turning CentreDocument10 pagesCNC Turning CentreArun100% (1)
- CAD/CAM/CIMDocument11 pagesCAD/CAM/CIMNPMYS23No ratings yet
- India Road Traffic SignsDocument17 pagesIndia Road Traffic Signsjivan tidakeNo ratings yet
- CADDocument21 pagesCADajit1130No ratings yet
- Seminar ReportDocument1 pageSeminar ReportRajdatta JoshiNo ratings yet
- Unit Ii Automated Flow LinesDocument94 pagesUnit Ii Automated Flow LinesRajesh Shah100% (1)
- Mechanics of MachineDocument9 pagesMechanics of MachineWaleed J sKNo ratings yet
- Automated Drilling MachineDocument14 pagesAutomated Drilling MachineVardhan ChipperNo ratings yet
- Welding Slag CLEANING MachineDocument5 pagesWelding Slag CLEANING MachineSuganthan IasNo ratings yet
- HPC (APPLICATIONS)Document46 pagesHPC (APPLICATIONS)Sneha PatilNo ratings yet
- 8automated Assembly SystemsDocument28 pages8automated Assembly SystemsvijayNo ratings yet
- Aim Lab 22Document21 pagesAim Lab 22ashish kumarNo ratings yet
- Unit 12 Tool Management in Advance Manufacturing Systems: StructureDocument11 pagesUnit 12 Tool Management in Advance Manufacturing Systems: StructureSHREY GIRINo ratings yet
- AR - Module-2 Q & A (SEE)Document7 pagesAR - Module-2 Q & A (SEE)Simply AkashNo ratings yet
- Ingenious Mechanisms Vol.1 - Jones 1930Document272 pagesIngenious Mechanisms Vol.1 - Jones 1930gandalfg8No ratings yet
- Geneva Mechanism and Its ApplicationsDocument4 pagesGeneva Mechanism and Its ApplicationsRutu PatilNo ratings yet
- Introduction of Gears:: 1.2 Gears For Parallel ShaftsDocument16 pagesIntroduction of Gears:: 1.2 Gears For Parallel ShaftsnareshNo ratings yet
- Multi-Function Operating Machine: A Conceptual Model: Sharad Srivastava, Shivam Srivastava, C.B.KhatriDocument10 pagesMulti-Function Operating Machine: A Conceptual Model: Sharad Srivastava, Shivam Srivastava, C.B.KhatriAnkit SinghNo ratings yet
- AM 7th Sem Solution 31.01.21 in CourseDocument9 pagesAM 7th Sem Solution 31.01.21 in CourseRaj PatelNo ratings yet
- Servomotor: Servo MotorDocument4 pagesServomotor: Servo MotorAngel AventedorNo ratings yet
- CNC Unit 6Document72 pagesCNC Unit 6rahul bhattNo ratings yet
- Automated AssemblyDocument30 pagesAutomated AssemblyPolavarapu Srinivasa RaoNo ratings yet
- AutT MotionDocument3 pagesAutT MotionSambath JoyNo ratings yet
- Creating a One-Piece Flow and Production Cell: Just-in-time Production with Toyota’s Single Piece FlowFrom EverandCreating a One-Piece Flow and Production Cell: Just-in-time Production with Toyota’s Single Piece FlowRating: 4 out of 5 stars4/5 (1)
- Design of Brakes With TheoryDocument17 pagesDesign of Brakes With TheorySUMIT MALUSARENo ratings yet
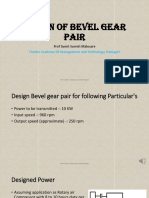
- Design of Bevel Gear Pair PDFDocument21 pagesDesign of Bevel Gear Pair PDFSUMIT MALUSARENo ratings yet
- Design of Bevel Gear Pair: Finolex Academy of Management and Technology, RatnagiriDocument5 pagesDesign of Bevel Gear Pair: Finolex Academy of Management and Technology, RatnagiriSUMIT MALUSARENo ratings yet
- Cam and Follower MechanismDocument35 pagesCam and Follower MechanismSUMIT MALUSARENo ratings yet
- Belt Drives BasicsDocument28 pagesBelt Drives BasicsSUMIT MALUSARENo ratings yet
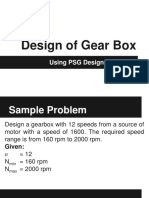
- Design of Gear BoxDocument19 pagesDesign of Gear BoxSUMIT MALUSARE100% (1)
- Initial Data ModifiedDocument17 pagesInitial Data ModifiedSUMIT MALUSARENo ratings yet
- P9736 (1) (1) 000000000000000000000000Document29 pagesP9736 (1) (1) 000000000000000000000000WASEM ANWARNo ratings yet
- Design Analysis of Geneva Drive Using CatiaDocument20 pagesDesign Analysis of Geneva Drive Using CatiaSahil AcharyaNo ratings yet
- Geneva Mechanism Literature ReviewDocument4 pagesGeneva Mechanism Literature Reviewaflslwuup100% (1)
- Dokumen - Tips Geneva Wheel Based Auto Roll Punching MachineDocument30 pagesDokumen - Tips Geneva Wheel Based Auto Roll Punching MachineBaldev SinghNo ratings yet
- Geneva MechanismDocument2 pagesGeneva MechanismrajivkumarbalagaNo ratings yet
- Detroit Type of AutomationDocument84 pagesDetroit Type of AutomationMunaf AcademyNo ratings yet
- Design and Fabrication of Paper Cutter 1Document29 pagesDesign and Fabrication of Paper Cutter 1Pát ŔiçkNo ratings yet
- 01 KOM - 18ME36 - Unit 1 - MechanismsDocument142 pages01 KOM - 18ME36 - Unit 1 - MechanismsKiran Thunuguntla100% (1)
- Experiment No: 1: Aim: - To Study Automated Flow Line (AFL) & Transfer Line MechanismDocument8 pagesExperiment No: 1: Aim: - To Study Automated Flow Line (AFL) & Transfer Line MechanismJust for funNo ratings yet
- Automated Punching MachineDocument8 pagesAutomated Punching MachineMohamed IbrahemNo ratings yet
- Je Tire 006084Document7 pagesJe Tire 006084AmerNo ratings yet
- Conveyor Belt Using Geneva Mechanism: Presented by Bishnu Jasleen Kaur Pranshu Tiwari Amit Kumar RaiDocument11 pagesConveyor Belt Using Geneva Mechanism: Presented by Bishnu Jasleen Kaur Pranshu Tiwari Amit Kumar RaibishnuNo ratings yet
- 1ZUA549200-505 VRLTC Technical Guide Rev2Document20 pages1ZUA549200-505 VRLTC Technical Guide Rev2Mạnh Nguyễn VănNo ratings yet
- Geneva Cam MechanismDocument58 pagesGeneva Cam MechanismAzri Lundu0% (1)
- Bottle Filling and Capping Using Geneva MechanismDocument5 pagesBottle Filling and Capping Using Geneva Mechanismabubeker muhamedNo ratings yet
- Design of An Automated Bottle Packaging SystemDocument5 pagesDesign of An Automated Bottle Packaging SystemIJAR JOURNAL100% (1)
- Geneva ConveyorDocument16 pagesGeneva ConveyorLuis Nunes67% (3)
- Radams ' 09Document370 pagesRadams ' 09Muthuvel M100% (1)
- Assignment 2 Industrial Automation With NotesDocument41 pagesAssignment 2 Industrial Automation With NotesSUMIT MALUSARENo ratings yet
- Advantages, Disadvantages AND ApplicationsDocument7 pagesAdvantages, Disadvantages AND ApplicationsEngineers GalleryNo ratings yet
- A1 Seminar Report-KomDocument24 pagesA1 Seminar Report-KomADITYA SURYAWANSHINo ratings yet
- Government College of Engineering Dharmapuri: Design and Fabrication of Paper Cutting Using Geneva MechanismDocument16 pagesGovernment College of Engineering Dharmapuri: Design and Fabrication of Paper Cutting Using Geneva Mechanismmani manisNo ratings yet
- Geneva Mechanism and Its ApplicationsDocument4 pagesGeneva Mechanism and Its ApplicationsRutu PatilNo ratings yet
- Paper Cutting MachineDocument11 pagesPaper Cutting MachineGopi SanikaNo ratings yet
- Kinematics of Machinery (AU 402) : Types of Kinematic Chain With Four Lower PairsDocument11 pagesKinematics of Machinery (AU 402) : Types of Kinematic Chain With Four Lower PairsJanardhanaNo ratings yet
- JMMA10090Document8 pagesJMMA10090Abhishek KumarNo ratings yet
- 1 Automation and MechatronicsDocument49 pages1 Automation and MechatronicsJEYAVEL PALANISAMYNo ratings yet
- Automation in Manufacturing 101-200Document100 pagesAutomation in Manufacturing 101-200MsNo ratings yet