Download as docx, pdf, or txt
You might also like
- Ethical Dimensions in The Health Professions PDFDocument2 pagesEthical Dimensions in The Health Professions PDFJames0% (7)
- 2010 CC 3.6 Engine Schematic R36Document19 pages2010 CC 3.6 Engine Schematic R36Dungani AllanNo ratings yet
- Test Bank For Essentials of Health Information Management 4th Edition by BowieDocument12 pagesTest Bank For Essentials of Health Information Management 4th Edition by Bowiebevisphuonglc1u5No ratings yet
- St501-Ln1kv 04fs EnglishDocument12 pagesSt501-Ln1kv 04fs Englishsanthoshs241s0% (1)
- How To Measure Differential Pressure Using Piezoresistive Sensing ElementsDocument8 pagesHow To Measure Differential Pressure Using Piezoresistive Sensing ElementsTolera WorkuNo ratings yet
- Boiler DP Transmitter 7mf 4433Document24 pagesBoiler DP Transmitter 7mf 4433Batuhan ZerenerNo ratings yet
- Expt 6. Pressure Measurement Using Piezo-Resistive Pressure SensorDocument4 pagesExpt 6. Pressure Measurement Using Piezo-Resistive Pressure SensorRaghav somaniNo ratings yet
- P 6410 Ip Iom-1Document5 pagesP 6410 Ip Iom-1victorvelasquezchalcoNo ratings yet
- APN-060 Low Impedance Restricted Ground Fault ProtectionDocument15 pagesAPN-060 Low Impedance Restricted Ground Fault ProtectionCarlos Roberto Hernandez FerrerNo ratings yet
- Structure and Signal Flow of Pneumatic Systems: Chapter 1 (Continued)Document32 pagesStructure and Signal Flow of Pneumatic Systems: Chapter 1 (Continued)Isaac GisoreNo ratings yet
- 08 PressureDocument8 pages08 PressureDimasGustiPradistaNo ratings yet
- Lab 7 Pressure Measurement ApparatusDocument34 pagesLab 7 Pressure Measurement ApparatusJohanDanMizaNo ratings yet
- ST 710 KHJV 03Document13 pagesST 710 KHJV 03Saad rechamNo ratings yet
- P/N 974128 08/05 Rev. D ECO # 30337Document52 pagesP/N 974128 08/05 Rev. D ECO # 30337bakri fattalNo ratings yet
- Aumatic Control Unit: Aumund Fördertechnik GMBHDocument7 pagesAumatic Control Unit: Aumund Fördertechnik GMBHBruno SantosNo ratings yet
- Controller For DHW Heat Pump Heaters: EN EnglishDocument4 pagesController For DHW Heat Pump Heaters: EN EnglishToussaintNo ratings yet
- ESSK106 - 100 P 700008 enDocument4 pagesESSK106 - 100 P 700008 enfeketez.huNo ratings yet
- Stop WatchDocument17 pagesStop WatchGaurav SinghNo ratings yet
- MPXV7007Document11 pagesMPXV7007Phi MacNo ratings yet
- Datasheet sx01dn PDFDocument10 pagesDatasheet sx01dn PDFarielfilthNo ratings yet
- PositionerDocument6 pagesPositionerarif fadhillahNo ratings yet
- Operating Instructions Pressure SensorDocument17 pagesOperating Instructions Pressure SensorCapacitacion TodocatNo ratings yet
- Digital Relay E1200 PDFDocument5 pagesDigital Relay E1200 PDFMisdehRasmanNo ratings yet
- Three Phase Energy Meter - Counter Type: FeaturesDocument6 pagesThree Phase Energy Meter - Counter Type: FeaturesAbhinandan JainNo ratings yet
- Lab Sheet CourseworkDocument5 pagesLab Sheet CourseworkMike GibsonNo ratings yet
- Industrial Instrumentation LecturesDocument25 pagesIndustrial Instrumentation LecturesJunaid JohnsonNo ratings yet
- Circuito Medidor PresiónDocument4 pagesCircuito Medidor Presiónfredy8704No ratings yet
- Pressure Sensor 0 - 10 Bar (0 - 1,000 Kpa), With Switching Outputs and DisplayDocument2 pagesPressure Sensor 0 - 10 Bar (0 - 1,000 Kpa), With Switching Outputs and DisplayhamidouhouNo ratings yet
- Calibration Instruction Gen 1Document3 pagesCalibration Instruction Gen 1pelon pelo ricoNo ratings yet
- Chapter 11 Electronic Calib PDFDocument25 pagesChapter 11 Electronic Calib PDFjoseNo ratings yet
- Pressure, Differential Pressure and Temperature TransmitterDocument108 pagesPressure, Differential Pressure and Temperature TransmitterAnggi SujiwoNo ratings yet
- Pressure Department: Business Head: Mr. Parthiv Kinariwala Tech. Manager: Ms. Riddhi KinariwalaDocument24 pagesPressure Department: Business Head: Mr. Parthiv Kinariwala Tech. Manager: Ms. Riddhi Kinariwala422881100% (1)
- Z0714242 005 DFS73 GBDocument9 pagesZ0714242 005 DFS73 GBЦлмг Цэрэндагва МодонгуудNo ratings yet
- Lec 2Document20 pagesLec 2Karim SakrNo ratings yet
- MPX5500 Sensor de Presion para ArduinoDocument7 pagesMPX5500 Sensor de Presion para ArduinoMarvin Melendez VanegasNo ratings yet
- Temperature Limiter, Temperature Monitor Nach Din en 14597: Jumo Safetym TB/TWDocument52 pagesTemperature Limiter, Temperature Monitor Nach Din en 14597: Jumo Safetym TB/TWRazvanNo ratings yet
- CS FileDocument11 pagesCS FileD StudiosNo ratings yet
- Sensors and SwitchesDocument18 pagesSensors and SwitchesAdhityaPahlefiNo ratings yet
- Festo SPAN-B PSI EN142493 202108 V01Document2 pagesFesto SPAN-B PSI EN142493 202108 V01bassem kortasNo ratings yet
- What Is Flapper Nozzle System - Instrumentation ToolsDocument3 pagesWhat Is Flapper Nozzle System - Instrumentation ToolsLeDuNo ratings yet
- Features: Position Control (Pid) With Min/Max Sele (Ars) 69229S904ADocument13 pagesFeatures: Position Control (Pid) With Min/Max Sele (Ars) 69229S904AWasim AhmedNo ratings yet
- Inst PrabhaDocument29 pagesInst Prabharaj guptaNo ratings yet
- Testing of Pressure Distribution Over A Cylindrical Tube Under CrossDocument6 pagesTesting of Pressure Distribution Over A Cylindrical Tube Under CrossTadesse AyalewNo ratings yet
- Module - 4Document44 pagesModule - 4Bhabatosh SenapatiNo ratings yet
- Transmitters Operation & MaintenanceDocument51 pagesTransmitters Operation & Maintenancedahmane mostafaNo ratings yet
- Actuators: Version 2 EE IIT, Kharagpur 1Document30 pagesActuators: Version 2 EE IIT, Kharagpur 1Khaled MahranNo ratings yet
- Actuators: Version 2 EE IIT, Kharagpur 1Document30 pagesActuators: Version 2 EE IIT, Kharagpur 1Khaled MahranNo ratings yet
- MPX5700Document11 pagesMPX5700frederypsNo ratings yet
- Pressure Switch ManualDocument19 pagesPressure Switch ManualJason TanNo ratings yet
- Calibration ManualDocument56 pagesCalibration ManualMaxence Kouessi100% (1)
- How To Monitor Sensor Health With Instrumentation AmplifiersDocument8 pagesHow To Monitor Sensor Health With Instrumentation AmplifiersJoseNo ratings yet
- Emailing Panasonic Door Operator AAD0302DKT01 NSFC01 01 PDFDocument14 pagesEmailing Panasonic Door Operator AAD0302DKT01 NSFC01 01 PDFاحمد المقرمي100% (1)
- PN-2500 NewDocument50 pagesPN-2500 NewcresjohnNo ratings yet
- Lab2: Programming Pic18F4550 Microcontroller With Button 1. ObjectivesDocument3 pagesLab2: Programming Pic18F4550 Microcontroller With Button 1. ObjectivesĐào Nhật TrungNo ratings yet
- Lecture 3B MCT 436Document109 pagesLecture 3B MCT 436Usman SheikhNo ratings yet
- Semiconductor Technical Data: Order This Document by MPX2010/DDocument13 pagesSemiconductor Technical Data: Order This Document by MPX2010/DTaTa ArroyaveNo ratings yet
- Intelligent Differential Pressure Transmitter: Product OverviewDocument3 pagesIntelligent Differential Pressure Transmitter: Product Overviewmfg_serviciosNo ratings yet
- Monitor - Espec.ws Files Dap013 858Document16 pagesMonitor - Espec.ws Files Dap013 858Glaucio AlmeidaNo ratings yet
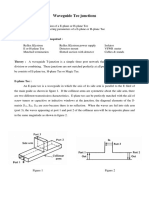
- Waveguide Tee Junctions: Expt. No.: DateDocument4 pagesWaveguide Tee Junctions: Expt. No.: DateSarvagya DasguptaNo ratings yet
- AND8331/D Quasi-Resonant Current-Mode Controller For High - Power Ac-Dc AdaptersDocument16 pagesAND8331/D Quasi-Resonant Current-Mode Controller For High - Power Ac-Dc AdaptersLucía MitchellNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Chapters 4 - 5 - 6 Quiz MC AnswersDocument7 pagesChapters 4 - 5 - 6 Quiz MC AnswersJamie N Clint BrendleNo ratings yet
- MS A480 / A490: Butterfly ValveDocument6 pagesMS A480 / A490: Butterfly ValveLuz HerazoNo ratings yet
- 1 2014 KTM 250-300 Exc XC-W ManualDocument292 pages1 2014 KTM 250-300 Exc XC-W ManualfesterqNo ratings yet
- Algebra I-B - Teacher's GuideDocument400 pagesAlgebra I-B - Teacher's GuideMLSBU11100% (1)
- Egypt: Gec08-Science, Technology & Society Modern AgesDocument7 pagesEgypt: Gec08-Science, Technology & Society Modern AgesNo NameNo ratings yet
- WWW - Recurrent Action Grammar - 1Document34 pagesWWW - Recurrent Action Grammar - 1goldengroveNo ratings yet
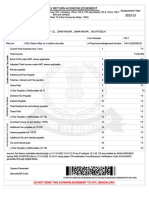
- Itr 22-23 PDFDocument1 pageItr 22-23 PDFPixel computerNo ratings yet
- Skoda New Scala Brochure February 2024Document27 pagesSkoda New Scala Brochure February 2024ayawe888888No ratings yet
- Supplier Audit Check SheetDocument5 pagesSupplier Audit Check SheetMotive Post100% (2)
- Brochure For ET 2023Document18 pagesBrochure For ET 2023Belal AhmedNo ratings yet
- Secondary Lesson Plan Template: Let Students Process and Get Their Misconceptions Out While Pulling Up The VideoDocument2 pagesSecondary Lesson Plan Template: Let Students Process and Get Their Misconceptions Out While Pulling Up The VideoKayla BrauerNo ratings yet
- PE Firm To Acquire Optimal Blue, Names Scott Happ CEODocument2 pagesPE Firm To Acquire Optimal Blue, Names Scott Happ CEOJacob PassyNo ratings yet
- Family Feud GameDocument16 pagesFamily Feud GamesboyyamagNo ratings yet
- Primary Health Care: Dr. Ariful Bari ChowdhuryDocument39 pagesPrimary Health Care: Dr. Ariful Bari ChowdhuryTanni ChowdhuryNo ratings yet
- Text Types in EnglishDocument1 pageText Types in Englishcarlos santanaNo ratings yet
- Result FormatDocument481 pagesResult FormatDinesh GodeNo ratings yet
- Poet, Lover, BirdwatcherDocument13 pagesPoet, Lover, BirdwatcherFhjjhhvNo ratings yet
- OS Manual Oretronic III Rec4105LDocument152 pagesOS Manual Oretronic III Rec4105LJose ReedNo ratings yet
- Survey Practical I PDFDocument19 pagesSurvey Practical I PDFSeasonNo ratings yet
- 9Document4 pages9maithaNo ratings yet
- PR-1948 - Electrical Safety Operating ProceduresDocument116 pagesPR-1948 - Electrical Safety Operating ProceduresVineshViswanathanNo ratings yet
- Interocclusal Records in Prosthodontic Rehabilitations - Materials and Techniques - A Literature ReviewDocument7 pagesInterocclusal Records in Prosthodontic Rehabilitations - Materials and Techniques - A Literature ReviewnandaNo ratings yet
- 6chefs Plate - Fresh Ingredients & Delicious Recipes Delivered To Your DoorDocument6 pages6chefs Plate - Fresh Ingredients & Delicious Recipes Delivered To Your DoorEmmaNo ratings yet
- Module 1 PDFDocument18 pagesModule 1 PDFYashaswiniNo ratings yet
- CyclamenDocument9 pagesCyclamenLAUM1No ratings yet
- Fundmentals Energy ProcessDocument11 pagesFundmentals Energy ProcessepjxNo ratings yet
- Metland Menteng e Brochure SDocument22 pagesMetland Menteng e Brochure Selha2727No ratings yet