Download as pdf or txt
You might also like
- Informations Some Interfaces of Proc Filesystem. Is There Any Other Ways To Get Process Memory Informations Apart From Proc Interfaces?Document10 pagesInformations Some Interfaces of Proc Filesystem. Is There Any Other Ways To Get Process Memory Informations Apart From Proc Interfaces?kumar0% (1)
- 6 Stages of Linux Boot ProcessDocument9 pages6 Stages of Linux Boot Processbhupendra kumar singhNo ratings yet
- Boot - Process, Systemd - RUN LevelsDocument18 pagesBoot - Process, Systemd - RUN LevelsArunaigiri NmNo ratings yet
- Different Types of Operating SystemsDocument8 pagesDifferent Types of Operating SystemsMahesh AbnaveNo ratings yet
- Session 1Document19 pagesSession 1Rathinam CollegeNo ratings yet
- OS-Record-21 RegulationDocument72 pagesOS-Record-21 RegulationSindhuja VigneshwaranNo ratings yet
- Operating Systems: Chapter 1: IntroductionDocument34 pagesOperating Systems: Chapter 1: IntroductionMultiple Criteria DssNo ratings yet
- Operating Systems-Unit 1Document89 pagesOperating Systems-Unit 1Himank JainNo ratings yet
- 090 DrlinuxDocument3 pages090 DrlinuxmakulatNo ratings yet
- Os Ch1 Operating System Overview PDFDocument38 pagesOs Ch1 Operating System Overview PDFElit HakimiNo ratings yet
- OSY Practical No.1Document18 pagesOSY Practical No.1aniket bhoirNo ratings yet
- Unit 1.1Document22 pagesUnit 1.1Ayush MehraNo ratings yet
- Junos AnglaisDocument27 pagesJunos AnglaisSuley PatersonNo ratings yet
- The Linux Boot Sequence: Administrator's Guide and From Chap. 6 of Linux UnleashedDocument7 pagesThe Linux Boot Sequence: Administrator's Guide and From Chap. 6 of Linux UnleashedAmulya VarshneyNo ratings yet
- 1008 Computing FundamantalsDocument26 pages1008 Computing Fundamantalsremya aniNo ratings yet
- Project For Operating SystemsDocument16 pagesProject For Operating SystemsTommyPanFangNo ratings yet
- Booting ProcessDocument4 pagesBooting ProcessRakesh KashyapNo ratings yet
- Unix NotesDocument18 pagesUnix Notesaayreen220No ratings yet
- UntitledDocument59 pagesUntitledSouradeep GuptaNo ratings yet
- Lesson 10 PCO System Software-FINALSDocument9 pagesLesson 10 PCO System Software-FINALSBee NeilNo ratings yet
- Multiprocessor Systems: 1. Increased Throughput. by Increasing The Number of Processors, We ExpectDocument8 pagesMultiprocessor Systems: 1. Increased Throughput. by Increasing The Number of Processors, We ExpectVaishnavi ShreeNo ratings yet
- Deep Sleep v. 0.8 DocumentationDocument7 pagesDeep Sleep v. 0.8 Documentationapi-295699No ratings yet
- (Xperf) : Introduction and Case StudiesDocument56 pages(Xperf) : Introduction and Case StudiesRotaru CristianNo ratings yet
- History of Computer Operating SystemsDocument12 pagesHistory of Computer Operating Systemsapi-3695543No ratings yet
- Chapter 1 Introduction To Operating SystemDocument59 pagesChapter 1 Introduction To Operating Systemliyagahnug61No ratings yet
- A Beginners Guide To ExitsDocument5 pagesA Beginners Guide To ExitsAtthulaiNo ratings yet
- Introduction To Operating SystemDocument59 pagesIntroduction To Operating SystemSAPTARSHI GHOSHNo ratings yet
- Introduction To Operating System (OS)Document39 pagesIntroduction To Operating System (OS)AdipNo ratings yet
- Operating SystemsDocument59 pagesOperating SystemsPrashant MittraNo ratings yet
- Introduction To Operating System (OS)Document69 pagesIntroduction To Operating System (OS)Himanshu MathurNo ratings yet
- Date: 11-12-2020 Branch: ECE /3 Year Topic: OS in Embedded System Time: 8:00 AM - 9:00 AMDocument7 pagesDate: 11-12-2020 Branch: ECE /3 Year Topic: OS in Embedded System Time: 8:00 AM - 9:00 AMTech guru MaheshwariNo ratings yet
- Linux Boot ProcessDocument9 pagesLinux Boot ProcessALKESH KUMRAWATNo ratings yet
- Assignment No: 02Document9 pagesAssignment No: 02Ali YaqteenNo ratings yet
- Introduction To Operating System (OS) : by Vinod SenchaDocument59 pagesIntroduction To Operating System (OS) : by Vinod SenchaKamlesh RajputNo ratings yet
- ThoughtsonPersistence Neel Mehta Baythreat2011Document53 pagesThoughtsonPersistence Neel Mehta Baythreat2011DonnieNo ratings yet
- Os 20210426203801Document59 pagesOs 20210426203801diana.manaliliNo ratings yet
- Chapter 01 Introduction To Operating SystemsDocument52 pagesChapter 01 Introduction To Operating SystemsMickNo ratings yet
- Wuolah Free Tests Diarios Resueltos2021 2022Document3 pagesWuolah Free Tests Diarios Resueltos2021 2022jsanchezn99No ratings yet
- Secure Computer 2006aDocument7 pagesSecure Computer 2006asaraNo ratings yet
- Os Lab ManualDocument75 pagesOs Lab ManualAmp RajasriNo ratings yet
- 6.1 Basic Technique: Limited Direct ExecutionDocument15 pages6.1 Basic Technique: Limited Direct ExecutionSadaf HussainNo ratings yet
- Operating Systems Lecture Notes: Matthew DaileyDocument31 pagesOperating Systems Lecture Notes: Matthew DaileyMegha HegdeNo ratings yet
- Operating Systems-1-Introduction - Structure - UpdatedDocument50 pagesOperating Systems-1-Introduction - Structure - Updatedamal53tyNo ratings yet
- Basics of Operating Systems (IT2019-2) : Assignment IIDocument5 pagesBasics of Operating Systems (IT2019-2) : Assignment IIGiang LeNo ratings yet
- Guide To Linux System Boot ProcessDocument10 pagesGuide To Linux System Boot ProcessJérôme AntoineNo ratings yet
- OS Solved Question PapersDocument17 pagesOS Solved Question PapersAbhilash M K AcharNo ratings yet
- Patching of ExadataDocument33 pagesPatching of ExadataVidyarthi Anurag100% (1)
- 22 Useful Tweaks To Make Ubuntu Feel Like Home PDFDocument21 pages22 Useful Tweaks To Make Ubuntu Feel Like Home PDFestudiocodecNo ratings yet
- CSC322 Operating SystemsDocument7 pagesCSC322 Operating SystemsJ-SolutionsNo ratings yet
- IT 6201C Final Lab ActivityDocument5 pagesIT 6201C Final Lab Activityems floraldeNo ratings yet
- Es Rtos Exp 5 - SKDocument15 pagesEs Rtos Exp 5 - SKAkshara VNo ratings yet
- Evolution of Operating SystemDocument22 pagesEvolution of Operating SystemRishi JainNo ratings yet
- 5 OperatingSystemDocument41 pages5 OperatingSystemThanh Võ Thị HoàiNo ratings yet
- MOS3E Chapter1 pp1 10Document10 pagesMOS3E Chapter1 pp1 10tutorial122011No ratings yet
- What Is Kernel?Document5 pagesWhat Is Kernel?ratheeshbrNo ratings yet
- Operating Systems: Chapter 5: Input/OutputDocument26 pagesOperating Systems: Chapter 5: Input/OutputMultiple Criteria DssNo ratings yet
- Linux BootingDocument7 pagesLinux BootingPriyankar RoychowdhuryNo ratings yet
- Operating System ConceptsDocument45 pagesOperating System ConceptsYusufNo ratings yet
- Introduction To Computers (C)Document3 pagesIntroduction To Computers (C)MorshedHumayunNo ratings yet
- 09 Optimal ZVS Modulation EvertsDocument18 pages09 Optimal ZVS Modulation EvertsGiancarloRichardRivadeneyraMirandaNo ratings yet
- Hollander - HF Oscillation Shunt Vs PearsonDocument19 pagesHollander - HF Oscillation Shunt Vs PearsonGiancarloRichardRivadeneyraMirandaNo ratings yet
- SN75LVDS88PFD Texas InstrumentsDocument12 pagesSN75LVDS88PFD Texas InstrumentsGiancarloRichardRivadeneyraMirandaNo ratings yet
- Guía UART de PS4 - Wiki de ReparaciónDocument9 pagesGuía UART de PS4 - Wiki de ReparaciónGiancarloRichardRivadeneyraMiranda50% (2)
- United States Patent: (10) Patent No.: (45) Date of PatentDocument23 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentGiancarloRichardRivadeneyraMirandaNo ratings yet
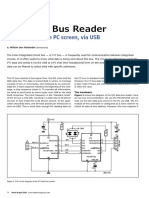
- Lector de Bus de Datos IÂ CDocument4 pagesLector de Bus de Datos IÂ CGiancarloRichardRivadeneyraMiranda100% (1)
- THAN0060 Rev.1.50 EDocument12 pagesTHAN0060 Rev.1.50 EGiancarloRichardRivadeneyraMirandaNo ratings yet
- 5800-P24QB-WP20-C (Electric Diagram) 2012.9.13Document1 page5800-P24QB-WP20-C (Electric Diagram) 2012.9.13GiancarloRichardRivadeneyraMirandaNo ratings yet
- HX8218-A 960CH TFT LCD Source Driver With Built-In TCON: Preliminary Version 01 January 2005Document48 pagesHX8218-A 960CH TFT LCD Source Driver With Built-In TCON: Preliminary Version 01 January 2005GiancarloRichardRivadeneyraMirandaNo ratings yet
- 1200/1152/1080/960-Output TFT LCD Gate Driver: Fitipower Integrated Technology IncDocument26 pages1200/1152/1080/960-Output TFT LCD Gate Driver: Fitipower Integrated Technology IncGiancarloRichardRivadeneyraMirandaNo ratings yet
- Service Manual: Auto WasherDocument42 pagesService Manual: Auto WasherGiancarloRichardRivadeneyraMirandaNo ratings yet
- FA1A60N/FA6B20N: Enhanced Efficiency With Dual ICDocument2 pagesFA1A60N/FA6B20N: Enhanced Efficiency With Dual ICGiancarloRichardRivadeneyraMirandaNo ratings yet
- N - Channel Enhancement Mode " Single Feature Size " Power MosfetDocument9 pagesN - Channel Enhancement Mode " Single Feature Size " Power MosfetGiancarloRichardRivadeneyraMirandaNo ratings yet
- Samsung-Ps43e400 Service ManualDocument66 pagesSamsung-Ps43e400 Service ManualGiancarloRichardRivadeneyraMiranda88% (8)
- Sunlord: Wire Wound SMD Power Inductors - SWPA SeriesDocument20 pagesSunlord: Wire Wound SMD Power Inductors - SWPA SeriesGiancarloRichardRivadeneyraMirandaNo ratings yet
- Kickstarting Your PCB Design With Partquest: W W W - P A D S - C o MDocument8 pagesKickstarting Your PCB Design With Partquest: W W W - P A D S - C o MGiancarloRichardRivadeneyraMirandaNo ratings yet
- SVC - Intervals Vertical Bar - 160422Document4 pagesSVC - Intervals Vertical Bar - 160422GiancarloRichardRivadeneyraMirandaNo ratings yet
- Battery Data Sheet Model: 564-276Document1 pageBattery Data Sheet Model: 564-276GiancarloRichardRivadeneyraMirandaNo ratings yet
- Led TV: Service ManualDocument89 pagesLed TV: Service ManualGiancarloRichardRivadeneyraMiranda100% (1)
- 05 - High Speed Interface Various Applications - LG전자 - 홍국태 발표자료 - HS Interface - V10Document51 pages05 - High Speed Interface Various Applications - LG전자 - 홍국태 발표자료 - HS Interface - V10GiancarloRichardRivadeneyraMirandaNo ratings yet
- Assignment 1Document1 pageAssignment 1raviNo ratings yet
- Design and Analysis of COTTER JOINT Using Autodesk Inventor 2013 and ANSYS WorkbenchDocument22 pagesDesign and Analysis of COTTER JOINT Using Autodesk Inventor 2013 and ANSYS WorkbenchamuNo ratings yet
- Artifical Intelligence - For IT AuditorsDocument16 pagesArtifical Intelligence - For IT AuditorssumairianNo ratings yet
- Ultra DTMR m08 Ing r2Document4 pagesUltra DTMR m08 Ing r2Cerduardo Chanchisco Roga RojasNo ratings yet
- Optimal Control and Dynamic Games PDFDocument351 pagesOptimal Control and Dynamic Games PDFNailulNellyIzzatiNo ratings yet
- Head LukasDocument43 pagesHead LukasSergent Khaos100% (1)
- Database Functions - DSUM DAVERAGE DCOUNT PDFDocument3 pagesDatabase Functions - DSUM DAVERAGE DCOUNT PDFPrateek MohapatraNo ratings yet
- Hitachi 32hb6t41u 32284dlbn Chassis 17mb97-r2 17ips62-R2 SMDocument65 pagesHitachi 32hb6t41u 32284dlbn Chassis 17mb97-r2 17ips62-R2 SMCarlos GonçalvesNo ratings yet
- MathsDocument2 pagesMathsJoshua S JedheeshNo ratings yet
- (K. K., Appuu Kuttan) Introduction To Mechatronics (B-Ok - CC)Document346 pages(K. K., Appuu Kuttan) Introduction To Mechatronics (B-Ok - CC)Yogendra MauryaNo ratings yet
- INSTOCK IPAS EDI InstructionDocument27 pagesINSTOCK IPAS EDI InstructionFei XueNo ratings yet
- Karnaugh Map: Engr. Pablo B. Asi Engr. Leni A. Bulan Engr. Liza R. MaderazoDocument18 pagesKarnaugh Map: Engr. Pablo B. Asi Engr. Leni A. Bulan Engr. Liza R. MaderazoDexter DoteNo ratings yet
- Chapter 11 - Projectiles and Circular MotionDocument56 pagesChapter 11 - Projectiles and Circular Motionascd_msvuNo ratings yet
- FriMar09050680351PM09510072007 ConceptWave Order Care OverviewDocument2 pagesFriMar09050680351PM09510072007 ConceptWave Order Care OverviewMahendra YadavNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document19 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Josué Abel Mamani RevillaNo ratings yet
- NotesDocument289 pagesNoteshemanth beharaNo ratings yet
- Structural Design of RCC CWR KL Capacity At-Dist - : 550 Abc NagaurDocument30 pagesStructural Design of RCC CWR KL Capacity At-Dist - : 550 Abc NagaurARSENo ratings yet
- University of Cagayan Valley School of Criminology 23Document4 pagesUniversity of Cagayan Valley School of Criminology 23gaea louNo ratings yet
- Revision Grade 7Document10 pagesRevision Grade 7Yousaf SaleemNo ratings yet
- DC Voltage Input Digital Panel Meter: 1 Before Using The Unit 3 Terminals and ConnectionsDocument10 pagesDC Voltage Input Digital Panel Meter: 1 Before Using The Unit 3 Terminals and ConnectionsAgustantoNo ratings yet
- Hendrickson Assignment4Document11 pagesHendrickson Assignment4Angel Nicole SorianoNo ratings yet
- CT AbdomenDocument2 pagesCT AbdomenVlog Anak DusunNo ratings yet
- What's New in Angular 17 - Angular 17 - Yaay or Naay - by Thamodi Wickramasinghe - Feb, 2024 - Bits and PiecesDocument17 pagesWhat's New in Angular 17 - Angular 17 - Yaay or Naay - by Thamodi Wickramasinghe - Feb, 2024 - Bits and PiecesifanNo ratings yet
- Sample Question Paper - Object Oriented Programming-12063Document4 pagesSample Question Paper - Object Oriented Programming-12063amit_t4210% (1)
- Annex A - Scope of WorkDocument4 pagesAnnex A - Scope of Workمهيب سعيد الشميريNo ratings yet
- Read MeDocument1 pageRead MeDileep MishraNo ratings yet
- Convergence of Random Variables - WikipediaDocument17 pagesConvergence of Random Variables - Wikipediasandeep aNo ratings yet
- Pneumatic Logic ComponentsDocument17 pagesPneumatic Logic ComponentskammoNo ratings yet
- MPR (22446) ManualDocument31 pagesMPR (22446) Manualsiddiquimuzammil876No ratings yet
- EGMO 2012-19 EN With Solutions PDFDocument151 pagesEGMO 2012-19 EN With Solutions PDFgarciacapitan100% (1)