
Schleher, D.C. - LPI Radar - Fact or Fiction
Schleher, D.C. - LPI Radar - Fact or Fiction
You might also like
- On History of S-300-400Document51 pagesOn History of S-300-400Dhimas AfihandarinNo ratings yet
- NSI-MI - Military Radome Performance and Verification TestingDocument7 pagesNSI-MI - Military Radome Performance and Verification TestingKashif KhalilNo ratings yet
- AMRDEC Facilities 2008Document42 pagesAMRDEC Facilities 2008Jim HowlandNo ratings yet
- Phased Array Antenna Calibration Method in Operating Condition - Rev MethodDocument2 pagesPhased Array Antenna Calibration Method in Operating Condition - Rev MethodMatthew CarterNo ratings yet
- Radar Quick Reference GuideDocument38 pagesRadar Quick Reference Guide5emoNo ratings yet
- Nes Smith 1976Document11 pagesNes Smith 1976Maxamed CabdiraximNo ratings yet
- Radar Cheat SheetDocument12 pagesRadar Cheat SheetEng-Sa'di Y. Tamimi100% (1)
- FIGHTER DESIGN From Soviet PerspectiveDocument26 pagesFIGHTER DESIGN From Soviet PerspectiveDhimas AfihandarinNo ratings yet
- Strategic Antisubmarine Warfare & Naval StrategyDocument414 pagesStrategic Antisubmarine Warfare & Naval StrategyDhimas AfihandarinNo ratings yet
- WK JK Remote StartDocument37 pagesWK JK Remote StartArnold Torres100% (1)
- Digital Microwave CommunicationDocument113 pagesDigital Microwave CommunicationRakesh Yadav100% (2)
- Recent Advances in Airborne Phased Array Radar SystemsDocument7 pagesRecent Advances in Airborne Phased Array Radar SystemsAhmed Hussain100% (1)
- Radar (Electronics) - Britannica Online Encyclopedia PDFDocument12 pagesRadar (Electronics) - Britannica Online Encyclopedia PDFJitendra PanwarNo ratings yet
- Risk Management Lessons Learned From The APG - 79 Radar Test Planning and ExecutionDocument51 pagesRisk Management Lessons Learned From The APG - 79 Radar Test Planning and Executionjade8880No ratings yet
- Radar Doppler DSPDocument57 pagesRadar Doppler DSPeolocos100% (1)
- Volume Surveillance Radar Frequency SelectionDocument6 pagesVolume Surveillance Radar Frequency SelectionDhimas AfihandarinNo ratings yet
- Introduction To RadarMWJDocument52 pagesIntroduction To RadarMWJTeddy112No ratings yet
- DuPlessis Extended (2009) - Cross Eye JammerDocument4 pagesDuPlessis Extended (2009) - Cross Eye JammerDhimas AfihandarinNo ratings yet
- Syntonics FSS AntennaBriefingDocument6 pagesSyntonics FSS AntennaBriefinghillnerNo ratings yet
- ChineseDocument3 pagesChineseDhimas AfihandarinNo ratings yet
- Ch5-Radar Target and ClutterDocument44 pagesCh5-Radar Target and ClutterWesley GeorgeNo ratings yet
- Radar EquationDocument32 pagesRadar EquationArsalan Ahmed Usmani100% (4)
- Imaging Infrared Seeker or Antitank MissileDocument4 pagesImaging Infrared Seeker or Antitank MissileRamesh SanilNo ratings yet
- Electronic Scanned Array DesignDocument357 pagesElectronic Scanned Array DesignvasikasNo ratings yet
- Upkar Radar EngineeringDocument9 pagesUpkar Radar Engineeringjeravi84No ratings yet
- X Band T/R Modules: ApplicationsDocument2 pagesX Band T/R Modules: ApplicationsHassan MehmoodNo ratings yet
- Estimating The GNSS Broadcast Ephemeris Error - PaperDocument4 pagesEstimating The GNSS Broadcast Ephemeris Error - PaperSebastian CiubanNo ratings yet
- SARDocument204 pagesSARArash MazandaraniNo ratings yet
- MIMO Radar: Snake Oil or Good Idea?: RaytheonDocument5 pagesMIMO Radar: Snake Oil or Good Idea?: RaytheontianNo ratings yet
- Direction of Arrival Estimation AlgorithmsDocument14 pagesDirection of Arrival Estimation AlgorithmsilgisizalakasizNo ratings yet
- AN - AAR-47A (V) 2 Electro-Optic Missile and Laser Warning SystemDocument2 pagesAN - AAR-47A (V) 2 Electro-Optic Missile and Laser Warning Systemsd_hosseini_88No ratings yet
- جزوه درس رادارDocument121 pagesجزوه درس رادارbahram bahramiNo ratings yet
- Aesa Rbe2: Aesa Radar For The Rafale, The Omnirole FighterDocument2 pagesAesa Rbe2: Aesa Radar For The Rafale, The Omnirole FighterAfeef Ibn AlbraNo ratings yet
- Millimeter-Wavelength RadarsDocument17 pagesMillimeter-Wavelength RadarsbingwazzupNo ratings yet
- Multi-Channel Transmit/receive Modules For X-Band AesaDocument3 pagesMulti-Channel Transmit/receive Modules For X-Band AesaDhimas AfihandarinNo ratings yet
- Grifo eDocument2 pagesGrifo eManuel SolisNo ratings yet
- Exam 2016 RadarDocument13 pagesExam 2016 Radaradib50% (2)
- Design of FMCW Radars For Active Safety Applications PDFDocument5 pagesDesign of FMCW Radars For Active Safety Applications PDFAnonymous LoJy6ERXdNo ratings yet
- Adaptive Active Phased Array Radar PresentationDocument17 pagesAdaptive Active Phased Array Radar PresentationHarika Kilari50% (2)
- Introduction To Radar Systems - 2014Document38 pagesIntroduction To Radar Systems - 2014lfsa90No ratings yet
- Effect of The Internet-Of-Things On Fire Control and Weapon SystemsDocument20 pagesEffect of The Internet-Of-Things On Fire Control and Weapon SystemsMimidbe BibiNo ratings yet
- Fact Sheet - Bill BoardDocument2 pagesFact Sheet - Bill BoardNick NumlkNo ratings yet
- A DarterDocument2 pagesA DarterManuel SolisNo ratings yet
- HIAST-A.Taha-Radar Systems Ebook-2017 PDFDocument399 pagesHIAST-A.Taha-Radar Systems Ebook-2017 PDFisam_702No ratings yet
- Grifo e MM08942 LQ PDFDocument2 pagesGrifo e MM08942 LQ PDFToufeeque AhmedNo ratings yet
- DRFM Basic PaperDocument7 pagesDRFM Basic PaperAjinkya Kale100% (1)
- MmwaveSensing FMCW Offlineviewing 0Document70 pagesMmwaveSensing FMCW Offlineviewing 0ppengNo ratings yet
- Real Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitDocument10 pagesReal Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitAI Coordinator - CSC JournalsNo ratings yet
- MIMO Radar A Idea Whose Time Has ComeDocument8 pagesMIMO Radar A Idea Whose Time Has Cometrongnguyen29No ratings yet
- ADS B TechnologiesDocument21 pagesADS B TechnologiesthanNo ratings yet
- Final ReportDocument43 pagesFinal ReportRajat RathiNo ratings yet
- Range Resolution Improvement of FMCW RadarsDocument104 pagesRange Resolution Improvement of FMCW RadarsLe Duy Trung0% (1)
- Cyient Transmit and Receive Module For Radar SystemsDocument4 pagesCyient Transmit and Receive Module For Radar SystemsPercy100% (1)
- Black Box ReportDocument24 pagesBlack Box ReportYashasCRNo ratings yet
- Micro PDFDocument55 pagesMicro PDFHem BhattaraiNo ratings yet
- Raytheon Technology Today 2004 - IssueDocument32 pagesRaytheon Technology Today 2004 - Issueparadizer100% (1)
- (2005) Advances in Active Radar Seeker TechnologyDocument8 pages(2005) Advances in Active Radar Seeker TechnologyAlex Yang100% (2)
- Infrared Quantum DotsDocument8 pagesInfrared Quantum DotsfaradeyisaheroNo ratings yet
- Passive and Low Frequency RadarDocument11 pagesPassive and Low Frequency RadarzaheermechNo ratings yet
- Sar Uav PDFDocument24 pagesSar Uav PDFadityaNo ratings yet
- Fire Vixen 500e Fire ControlDocument2 pagesFire Vixen 500e Fire ControlwyrumaNo ratings yet
- Global Positioning Systems, Inertial Navigation, and IntegrationFrom EverandGlobal Positioning Systems, Inertial Navigation, and IntegrationNo ratings yet
- 24 Radar PDFDocument11 pages24 Radar PDFMohd AhfazNo ratings yet
- Multi-Channel Transmit/receive Modules For X-Band AesaDocument3 pagesMulti-Channel Transmit/receive Modules For X-Band AesaDhimas AfihandarinNo ratings yet
- 4th Generation Nukes 1Document54 pages4th Generation Nukes 1lipsmalloyNo ratings yet
- ADA241165-Soviet Weapon Systems AcquisitionDocument91 pagesADA241165-Soviet Weapon Systems AcquisitionDhimas AfihandarinNo ratings yet
- SAAB IRST, The System and Flight TrialsDocument15 pagesSAAB IRST, The System and Flight TrialsDhimas AfihandarinNo ratings yet
- SFRJ ProjectileDocument21 pagesSFRJ ProjectileDhimas Afihandarin100% (1)
- Mission Success Probability of HypersonicsDocument6 pagesMission Success Probability of HypersonicsDhimas AfihandarinNo ratings yet
- Historical Overview of Phased Array Antennas For Defense Application in JapanDocument5 pagesHistorical Overview of Phased Array Antennas For Defense Application in JapanDhimas AfihandarinNo ratings yet
- Vendetta - Long Range Deep PenetratorDocument98 pagesVendetta - Long Range Deep PenetratorDhimas Afihandarin100% (1)
- Andre Gsponer - Fourth Generation Nuclear Weapons: Military Effectiveness and Collateral EffectsDocument54 pagesAndre Gsponer - Fourth Generation Nuclear Weapons: Military Effectiveness and Collateral EffectsGinertgNo ratings yet
- Merdeka Dutch Military Operations in Indonesia 1945 1950Document70 pagesMerdeka Dutch Military Operations in Indonesia 1945 1950Dhimas AfihandarinNo ratings yet
- Counting The Weapons. American Spy SatelliteDocument11 pagesCounting The Weapons. American Spy SatelliteDhimas AfihandarinNo ratings yet
- Atomic Powered Submarine Design Chapter 8 V M BukalovDocument52 pagesAtomic Powered Submarine Design Chapter 8 V M BukalovPeter AngeloNo ratings yet
- Correction To f16 Pulse Doppler Radar Anapg66 Performance - 1983Document1 pageCorrection To f16 Pulse Doppler Radar Anapg66 Performance - 1983Dhimas AfihandarinNo ratings yet
- F-16 Pulse Doppler Radar (AN/APG-66) Performance-1983Document12 pagesF-16 Pulse Doppler Radar (AN/APG-66) Performance-1983Dhimas Afihandarin100% (2)
- DuPlessis Extended (2009) - Cross Eye JammerDocument4 pagesDuPlessis Extended (2009) - Cross Eye JammerDhimas AfihandarinNo ratings yet
- Immoreev, I. - Active Transmitting Phased Antenna ArraysDocument14 pagesImmoreev, I. - Active Transmitting Phased Antenna ArraysDhimas AfihandarinNo ratings yet
- AESA Radar Calculator-The User's Read-Preliminary VersionDocument2 pagesAESA Radar Calculator-The User's Read-Preliminary VersionDhimas Afihandarin100% (2)
- Campbell, P. - Comments On - Energy Stored in Permanent MagnetsDocument3 pagesCampbell, P. - Comments On - Energy Stored in Permanent MagnetsDhimas AfihandarinNo ratings yet
- Volume Surveillance Radar Frequency SelectionDocument6 pagesVolume Surveillance Radar Frequency SelectionDhimas AfihandarinNo ratings yet
- Cruise Missile DefenseDocument51 pagesCruise Missile DefenseDhimas Afihandarin100% (1)
- ChineseDocument3 pagesChineseDhimas AfihandarinNo ratings yet
- Survey of Russian Low Cost Phased ArrayDocument5 pagesSurvey of Russian Low Cost Phased ArrayDhimas Afihandarin100% (1)
- Kuschel, H. VHF-UHF Radar: Part 2. Operational Aspects and ApplicationsDocument11 pagesKuschel, H. VHF-UHF Radar: Part 2. Operational Aspects and ApplicationsDhimas Afihandarin100% (1)
- Kuschel, H. - VHF - UHF Radar. 1. CharacteristicsDocument12 pagesKuschel, H. - VHF - UHF Radar. 1. CharacteristicsDhimas AfihandarinNo ratings yet
- LCDR Nate "Hyber" Marler Advanced Weapons Lab, VX-31 China Lake, CaDocument51 pagesLCDR Nate "Hyber" Marler Advanced Weapons Lab, VX-31 China Lake, CaDhimas Afihandarin100% (4)
- RadBase2 Tech PaperDocument10 pagesRadBase2 Tech PaperDhimas AfihandarinNo ratings yet
- The Advanced Simulation System For MMW Imaging Radar Seeker Onboard Air-To-Air MissileDocument4 pagesThe Advanced Simulation System For MMW Imaging Radar Seeker Onboard Air-To-Air MissileDhimas AfihandarinNo ratings yet
- Cellmax-D-Cpuse: Electrical SpecificationsDocument3 pagesCellmax-D-Cpuse: Electrical Specificationsjosetb_hNo ratings yet
- MCWC GTU Study Material Presentations Unit-2 25072021031051PMDocument36 pagesMCWC GTU Study Material Presentations Unit-2 25072021031051PMjigneshNo ratings yet
- AAU3911 Hardware Description (04) (PDF) - enDocument64 pagesAAU3911 Hardware Description (04) (PDF) - enMd Ataulla64% (11)
- Evs27 2440228Document9 pagesEvs27 2440228jhabNo ratings yet
- EF-140S and EF-140S/H: 40 Meter Linear Loaded DipoleDocument26 pagesEF-140S and EF-140S/H: 40 Meter Linear Loaded Dipolesboonuy331No ratings yet
- EE609 Lect-6-2023 Horn ReflectorDocument25 pagesEE609 Lect-6-2023 Horn Reflectorgargbansalpulkit100% (1)
- Design and Analysis of An Active Integrated AntennaDocument58 pagesDesign and Analysis of An Active Integrated AntennaAli AliNo ratings yet
- LTE Optimization GuidelineDocument55 pagesLTE Optimization GuidelineJairo Fabian Basto ParedesNo ratings yet
- MGL Avionics V16 Aviation Band Transceiver User and Installation ManualDocument25 pagesMGL Avionics V16 Aviation Band Transceiver User and Installation ManualAlexandruNo ratings yet
- S800 User Manual (ENG)Document35 pagesS800 User Manual (ENG)Andri DikaNo ratings yet
- Microstrip Patch AntennaDocument5 pagesMicrostrip Patch Antennamsh-666No ratings yet
- A Women SafetyDocument3 pagesA Women Safetyhamed razaNo ratings yet
- Apxvll14h - 43 C I20Document3 pagesApxvll14h - 43 C I20Cami GenaroNo ratings yet
- 2G6WF 00VDocument4 pages2G6WF 00VHoang DoNo ratings yet
- Gate 2016 Questions and AnswersDocument29 pagesGate 2016 Questions and AnswersRavi AnnepakaNo ratings yet
- Odp-090r16bv 17KV PDFDocument1 pageOdp-090r16bv 17KV PDFAlberto LinaresNo ratings yet
- Test Report Part 22 PDFDocument31 pagesTest Report Part 22 PDFPabl OrozkoNo ratings yet
- CV65CSX-M Product SpecificationsDocument5 pagesCV65CSX-M Product Specificationsnivesh vermaNo ratings yet
- PCB Antenna TheoryDocument26 pagesPCB Antenna TheoryEdmundo Eduardo Lashley100% (1)
- Sirio VHF Uhf 2019Document60 pagesSirio VHF Uhf 2019Noor M.SNo ratings yet
- KPI Optimization Test Plan For LTEDocument42 pagesKPI Optimization Test Plan For LTEhuzaif zahoorNo ratings yet
- Motorola PTP 800 Series 02-04 User GuideDocument391 pagesMotorola PTP 800 Series 02-04 User GuideDaniel Xavier Oliveira Dos SantosNo ratings yet
- Cellmax o CpuseDocument2 pagesCellmax o CpuseMarcos GrabicoskiNo ratings yet
- Cma-B/3324: GSM / Cdma: 1800, 1900 & 2100Document1 pageCma-B/3324: GSM / Cdma: 1800, 1900 & 2100susah emailNo ratings yet
- Intro MicrowaveDocument16 pagesIntro Microwaveclaudinejene.reyes25No ratings yet
- Extc Sem6 SyllabusDocument50 pagesExtc Sem6 SyllabusVIRENDRA KUMAR SAHUNo ratings yet
- Designer PolarizationDocument9 pagesDesigner Polarizationravi010582No ratings yet

















































































































LPI Radar: Fact or Fiction
D.C. Schleher
Naval Postgraduate School
ABSTRACT a description of the various types of ES systems for which
this claim applies. However the LPI radar can never
LPI radar is a system that consists of a radar and ES completely escape detection since there is always a
system. Its performance depends on both components. An minimum range (RES) between the ES system and radar
LPIPerformance Factor is derived and applied to several where the interception receiver detection threshold is
examples. Operational LPIradars are described. A Digital exceeded.
LPIRadar Detector is described and test results presented.
A recent book on LPI radar received a number of
LPIRADAR PERFORMANCEFACTOR
somewhat critical reviews that were published in Systems
magazine [1-5]. Although these reviews made a number of
excellent poin ts, several questioned the existence of LPI The scenario to be analyzed envisions a tactical platform,
radar. The objectives of this article are to provide a sound with radar cross-section (0,), that is equipped with an ES
technical basis for determining LPI properties of radar, system whose function is to alert the platform that is being
examine several radars that have LPIqualities, and then to targeted by the LPI radar. Interception of the radar
describe a Digital LPIRadar Detector designed and tested transmissions by the ES intercept receiver before the platform
against the PILOT Mk2 Radar. can be detected by the radar enables the platform to employ EA
LPI Rad ar is a system that represents a confluence or other defense suppression actions thereby reducing its
between Radar and Electronic Support (ES) technology. vulnerability to attack. Conversely, if the LPI radar can detect
The objective of an LPI Radar is clear; that is, to escape the platfonn before it is alerted by its ES system then the
detection by the ES receiv er . However, the capability of the
platform becomes vulnerable to missile attack and other
offensive actions.
LPIRadar system depends upon the characteristics of both
To illustrate the application of the LPI perfonnance formula
the Radar and ES receiver. To understand LPI radar one
let us assume that the PILOT Mk2 radar is used in a Coastal
must first understand the nature of ES receivers. The
Surveillance application to detect small 100 m2 ships while it
functions performed by tactical ES receivers are
is to be intercepted by a conventional Radar Warning Receiver
immediate interception, identification, and location of both
(RWR) on the ship. RWRs employ main beam detection to
friendly and hostile emitters. Location requires
intercept immediate threats. They generally use four- to six
interception in the emitter's sidelobes. Identification is
spiral antennas whose coverage is equally spaced over 3600 in
performed by comparing the intercepted signature against
azimuth and have a gain of 0 dBi A CODUnon architecture
.
the signatures contained within its threat library [6]. The utilizes a crystal video receiver (CVR) with a front-end LNA
metric that establishes the quality of interception is called complemented by a sca n ni n g Superhetrodyne Receiver (SHR)
the Probability ofIntercept (POI) and is generally included to detect CW and high-duty-cycle Pulsed Doppler radars and
in its specifications [6]. an IFM receiver to accurately measure the emitter's frequency.
From the above discussion it is evident that radar might The SHR is th e best choice, since CVR and IFM receivers have
have LPI properties with respect to one type, but not to limitations againstFMCW-type signals. The normal maximum
another type of ES system. This situation can be clarified if bandwidth of a SHR in practice is 20 MHz that would have to
the claim of a radar being an LPIradar is accompanied by be increased to 50 MHz for this application. The SHR could
then easily detect the PILOT MK2 signal that has a 30 MHz
uncertainty about its nominal operating frequency of 9375
MHz.
Author's Current Address:
Naval PostgJ1lduate Sctwol. 185 Chick Road. Camano lsl""d. WA 98282. USA. A performance parameter for LPI radar is given in Figure I.
Manuscript recdYed March 9, 2006. Accor ding to the comp uter program in Refere n ce [6] the
088518985/061 $17.[)o Ie 2006 IEEIl PILOT Mk2 has a noise limited detection range of is
IEEE A&E SYSTEMS MAGAZINE. MAY 2006
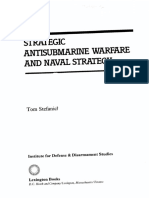
A perfonnance parameter (a) that quantifies the quality of an LPI radar is Ihe
ratio of the range (R.., J at which an intercept receiver on board the platform can detect
the LP[ radar to the range (HR) at which the platform can be detected by the LP[ radar
[7J. A ratio less than one (a < I) indicates that the radar has LPI properties while a ratio
greater than one (a � I) indica tes an advantage to th e ES system.
where
a=R.., RQR=RR(I-a), as!.
RR
The derivation of the above formula assumes that the radar and ES receivers have similar
noise figures and detection s ingle sample threshold sensitivities. The quiet range (RQR) is
a metric that identifies the range that the LPI radar can detect the target without
interception from the ES system.
The fi rs t term indicates t ha t radars with longer noise limited detection ranges
(RR) increase the detection range of the ES system. This follows from the one-way free
space loss of the intercept receiver while the radar experiences a two-way free space loss.
Further platforms with lower RCS «(7,) inc rease the interception range (RES) of the ES
system due to the increased power required by the radar. Since the ES system generally
processes only one sample while the radar processes multiple returns the interception
range is decreased relative to the detection range of the radar by the integration gain (IG)
of the radar.
The second term involves the antenna gain of the radar (Gr ), the antenna gain of
the intercept receiver (G..,) and the antenna gain of the radar in the direction of the
intercept receiver (GrES). For main beam intercepts this term reduces toG£.< IGr.
Generally this term reduces the interception range (RES) of the ES system relative to the
radar since the antenna gain of t he radar is generally much greater than that of the ES
system. For sidelobe interce ption it is important to reduce GrES to as small a magn itude
as practicable pointing to the need for ultralow sidelobe antennas in LPI radar design.
The third term involves the ratio of the radii! detection noise bandwidth (B"R) to
the ES receiver detection noise bandwidth (BNes). This factor always reduces the
interception range (RES) of the ES system relative to the radars range since the radar can
employ a matched filter receiver while the ES receiver is generally severely mismatched
to the many waveforms it musl process. LP[ radar waveform design focuses on reducing
its noise bandwidth by using phase or frequency modulated CW waveforms such as
FMCW to spread the frequency spectrum of the signal over a wideband while its matched
filter compresses the spectrum into a narrow frequency band that generally corresponds
to the reciprocal of the period of the waveform. The mechanism for LPI operation
involves the difference in processing whereby the radar has available a stored coherent
replica of its transmitted waveform while the ES receiver at best must synthesize the
waveform to be intercepted. For example, the PILOT radar. in one of its modes employs
.
a simple FMCW wavefonn that linearly sweeps through 50 MHz in I ms resulting in a
noise bandwidth of I kHz. If the i ntercept receiver employs some form of envelope
det ect or its noise bandwidth must be a min imum of 50 MHz. The ratio of the relative
noise bandwidth's then favors the LPI radar by a factor of 4 7 dB.
The fourth term involves the ratio of the various losses attributed to the radar and
ES detection processes. These losses translate the computed idealized range performance
into that realized by a practical system and are diverse in narure and a function of the
detailed strucrure of the radar and associated ES system [8]. As 8 working number it ls
convenient to assume that the losses associated with the ES and LPI radar systems are
similar and th e value of this term is one.
Fig. 1. LPI Radar Performance Factor
kilometers against a 100 m' Swerling 3 target and an expected that a large radar loss might result from target
integration g ain of 3 38. The antenna rotates at 48 rpm and fragmentation due to the 3 m resolution of the radar.
provides a gain of 30 dB and a beamwidth of 1.20. The losses of Substituting these parameters into the LPI performance
the ES system and radar are assumed equal although it is equation results in a = 0.409 indicating that the PILOT Mk2
4 IEEE A&B SYSTBMS MAGAZINB, MAY 2006
radar has LPI properties against the SHR-based RWR-type generally true since most currently designed ES receivers
interception receiver. The resulting range of the ES system is operate on the basis of a single sample and have little or no
6135 m while the quiet range of the LPI radar is 8865 m. capability to detect internal signal modulation such as
As another example, consider an operational airborne employed in FMCW radar. Under these circumstances, the
EUNT intercept receiver utilizing a spinning dish antenna FMCW signal is completely mismatched to the ES receiver
with 20 dB gain and a 50 MHz SHR [9, 10]. The platform has a signal processor, thereby preventing interception. However,
25 m' RCS and the Swerling 1 radar detection range is 8520 m. since the FMCW radar's characteristic is known at the ES
Applying our formula for mainbeam interception results in a = receiVer, it is relatively easy to synthesize a matched filter for
4.645 and a R., of 39,575 m indicating that the PILOT Mk2 the specific FMCW radar waveform used in the PILOT LPI
does not have LPI properties against this EUNT system. radar. In this regard, the strategic problem faced by the ES
However the POI for this situation is extremely low for this receiver is to provide, not only a matched filter for this LPI
classic beam-on-beam detection problem [6]. For sidelobe radar waveform, but also for all conventional signals to be
interception the radar has LPI properties since a = O. 104. In intercepted.
g eneral the PILOT Mk2 presents a difficult target for this The recently introduced PILOT Mid operates with
operational EUNT system. frequency agility (FA) over a band from 9.1-9.5 GHz and
includes a Reflected Power Canceller (RPC) that enables it to
OPERATIONAL LPI RADAR SYSTEMS operate with a single TransmitlReceive antenna [12]. The FA
would require ES systems to use some form of Channelized
The principal idea of LPI radar is to escape interception by receiver that is only available in the most modern RWRs (e.g.,
mismatching its waveform to those waveforms for which an ALR-67(V)3).
ES receiver is tuned. Since the majority of ES receivers are
f
tuned to detect pulse, CW , and pulsed Doppler waveforms it is
i ntuitively obvious that it should use some form of frequency so MHz
or phase-coded high duty cycle signal. The wide bandwidth
will negate the CW receiving channel and the high duty cycle
with associated low peak power will make it difficult for the
pulse channel to detect and identify the signal. The FMCW and
phase-coded CW waveforms meet these criteria. The PILOT
radar is an excellent example of LPI radar that is designed to be
invisible to existing ES receivers. At the Naval Postgraduate
School (NPS), we tested the PILOT against two sensitive ES
and EUNT receivers and found the manufacturers claims to be
1 ms
substantially true [10, 11].
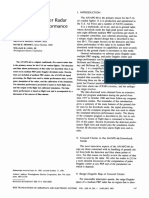
The operating principle of the FMCW PILOT Radar is best f
understood by referring to the waveform diagram depicted in
Figure 1. The target return is displaced in time, but identical in 512 �f - - - - - - - - - - - - - - - - - - - - - - - r -
shape, to the 50 MHz transmitted waveform. By mixing the
target and transmitted waveforms in a homodyne receiver an IF Bandwidth
approximately steady tone is produced whose frequency is
proportional to the target's range. However there is an end
!
effect that is eliminated in the PILOT by the receiver' s 512 kHz
1 ms
IF bandwidth. The resulting beat frequency can be visualized
as a one-millisecond rectangular pulse whose frequency is
proportional to the range of the target. The matched filter for Fig. 2. PILOT FMCW Waveforms
this pulse has a 1 kHz noise bandwidth. The matched filter is
formed by a 512-point FFT filter bank where each filter's Another operational LPI radar is the Ku-band APQ-181
bandwidth is 1 kHz and whose filter position represents the used in the B-2 stealth aircraft [13]. The necessity of an LPI
target range. Note that the 1 kHz noise bandwidth is design for stealth platforms using radar is obvious since
determined by the period of the waveform and hence is detection and location by an ES system would compromise its
independent of the frequency excursion of the linear sweep. low observable properties. The radar employs a phased array
The necessity for minimizing the end effect restricts the antenna and a gridded TWT transmitter similar to those in the
maximum range for each of the 6 range modes of the PILOT APG-63, 65, and 70 radars. The details of the LPI waveform
radar to a small percentage of the total unambiguous range that are classified.
might be available from a sweep period of 1 ms. Many Radar Altimeters have LPI properties. These radars
The manufacturers of this radar claim that the radar is have special characteristics in that they process only a single
invisible to all currently available ES receivers. This claim is target and their antenna's mainbeam is directed away from
IEEE A&E SYSTEMS MAGAZINE, MAY 2006
potential intercept receivers. Their transmitter signals are REFERENCES
generally power managed.
[I] p, Pace,
Detecting and Classifying LPI Radar,
THE DIGITAL LPI RADAR DETECTOR
Artech, Norwood. MA, 2004.
An adaptive digital LPI radar detector was designed, bu ilt (2) P. Bskelinen,
using COTS components, and tested at NPS against the PILOT Review of Detecting and Classifying LPI Radar,
Systems Magazine, May 2004,
Mk2 radar [14, 15 1 . The LPI de te ctor was initially designed
and tested using MATLAB simulation. Then the front-end [3] E. Key,
c onsisti ng of an a ntenna LNA, mixer, and La was
,
Review of Detecting and Classifying LPI Radar,
implemented using COTS hardware. The resulting baseband Systems Magazine, June 2004.
signal was amplified in a 50 MHz video amplifier and applied
(4) CA Fowler,
to a digital storage Gage card containing an 8-bit 250 MHz
Review of Detecting and Classifying LPI Radar,
AID converter, data storage and MATI..AB interface Systems Magazine, November. 2004.
embedded in a PC. Processing to detect and identify the LPI
signal is then accomplished using the MA'fLAB program [51 S, Johnston,
Review of Detecting and Classifying LPI Radar,
developed from the simulation design. The same procedure
Systems Magazine, November, 2004.
can be used to process any LPI waveform.
The philosophy of the design was that it is possible to (6] D,C. SchIeher,
adaptively form a matched filter using the general known Electronic Warfare in the Information Age,
PILOT signal structure. The processor adaptively tests the Artech, Norwood, MA, 1999.
received PILOT signal using de rampi ng techniques similar to [7] D.C. Schleher,
those used in "Stretch Radar" to form a matched filter. The Low Probability ofIntercept Radar,
processor not only finds the correct mode (bandwidth) of the IEEE Radar Conference, Washington. DC, May 1985.
PILOT radar but also synchronizes to its sweep. The measured
[8) D.C Scbleher,
sensitivities achieved at the receiver terminals were -108 dBm
Introduction to Electronic Warfare,
for the 50 MHz bandwidth mode and - 123 dBm for the 1.625 Artecb, Norwood, MA, 1986.
MHz bandwidth mode. For I W tran smitter power and -25 dB
sidelobes, the signal can be inter cepted through its sidelobes (9) D. C Schieber,
Detection of LPI Radar Signals,
and identified at a maximum range of 220 krn with a spinning
43d Annual Joint Electronic Warfare Conference,
20 dB antenna gain dish. For mainlobe intercepts with the high Colorado Springs, 199&.
bandwidth 1 mW mode, as might occur in a power managed
missile seeker, the maximum intercept range is 55 krn. The [LO) T. Kubusta,
processor was successfully tested, using Simulation, against Intercepting a Covert Naval Radar,
NPS lbesis, Monterey, CA, September 1996.
the interference from 500 pulse radars operating in the same
frequency band as the PILOT radar. [I I] G. Haws,
Effectiveness Assessment of LPI Radar,
CONCLUSION NPS Thesis, Monterey, CA, September 1995.
[12) 5aab - PILOT MkJ LPI Navigation and Detection Radar,
LPI radar is a system that involves both a radar and ES www.navy�technology.oom.
system. Since there are many types of ES systems, the claim
that a radar has LPI properties must include a description of the (13) C Smith,
The 8-2 Radar,
types of ES systems for which the claim applies. A metric that
Presentation to AUTOTESTCON'91.
quantifies the quality of LPI radar against a particular ES
system is the quiet range. Waveform design to achieve LPI [14) D,C. SchIeher,
operation relies on mismatching the radar signal to the signals The LPI Radar Detector,
44· Annualloint Electronic Warfare Conference,
for which the ES system is tuned However, in general the
.
Monterey, 1999.
signature of the LPI radar must be known at the ES receiver to
accomplish its identification function. This signature is [15) P. Dng and H. Teng,
obtained through SIGINT and other intelligence methods. Digital LPI Radar DetectDr.
Knowledge of the signiature allows the ES s ys te m to form a NPS Thesis, Monterey, CA, Marcb 2001,
(Available from DTIC),
matched filter for the LPI radar signal that will generally
negate the LPI properties of the radar but may not be
econ omically practicable.
6 IEEE A&E SYSTEMS MAGAZINE, MAY 2006
You might also like
- On History of S-300-400Document51 pagesOn History of S-300-400Dhimas AfihandarinNo ratings yet
- NSI-MI - Military Radome Performance and Verification TestingDocument7 pagesNSI-MI - Military Radome Performance and Verification TestingKashif KhalilNo ratings yet
- AMRDEC Facilities 2008Document42 pagesAMRDEC Facilities 2008Jim HowlandNo ratings yet
- Phased Array Antenna Calibration Method in Operating Condition - Rev MethodDocument2 pagesPhased Array Antenna Calibration Method in Operating Condition - Rev MethodMatthew CarterNo ratings yet
- Radar Quick Reference GuideDocument38 pagesRadar Quick Reference Guide5emoNo ratings yet
- Nes Smith 1976Document11 pagesNes Smith 1976Maxamed CabdiraximNo ratings yet
- Radar Cheat SheetDocument12 pagesRadar Cheat SheetEng-Sa'di Y. Tamimi100% (1)
- FIGHTER DESIGN From Soviet PerspectiveDocument26 pagesFIGHTER DESIGN From Soviet PerspectiveDhimas AfihandarinNo ratings yet
- Strategic Antisubmarine Warfare & Naval StrategyDocument414 pagesStrategic Antisubmarine Warfare & Naval StrategyDhimas AfihandarinNo ratings yet
- WK JK Remote StartDocument37 pagesWK JK Remote StartArnold Torres100% (1)
- Digital Microwave CommunicationDocument113 pagesDigital Microwave CommunicationRakesh Yadav100% (2)
- Recent Advances in Airborne Phased Array Radar SystemsDocument7 pagesRecent Advances in Airborne Phased Array Radar SystemsAhmed Hussain100% (1)
- Radar (Electronics) - Britannica Online Encyclopedia PDFDocument12 pagesRadar (Electronics) - Britannica Online Encyclopedia PDFJitendra PanwarNo ratings yet
- Risk Management Lessons Learned From The APG - 79 Radar Test Planning and ExecutionDocument51 pagesRisk Management Lessons Learned From The APG - 79 Radar Test Planning and Executionjade8880No ratings yet
- Radar Doppler DSPDocument57 pagesRadar Doppler DSPeolocos100% (1)
- Volume Surveillance Radar Frequency SelectionDocument6 pagesVolume Surveillance Radar Frequency SelectionDhimas AfihandarinNo ratings yet
- Introduction To RadarMWJDocument52 pagesIntroduction To RadarMWJTeddy112No ratings yet
- DuPlessis Extended (2009) - Cross Eye JammerDocument4 pagesDuPlessis Extended (2009) - Cross Eye JammerDhimas AfihandarinNo ratings yet
- Syntonics FSS AntennaBriefingDocument6 pagesSyntonics FSS AntennaBriefinghillnerNo ratings yet
- ChineseDocument3 pagesChineseDhimas AfihandarinNo ratings yet
- Ch5-Radar Target and ClutterDocument44 pagesCh5-Radar Target and ClutterWesley GeorgeNo ratings yet
- Radar EquationDocument32 pagesRadar EquationArsalan Ahmed Usmani100% (4)
- Imaging Infrared Seeker or Antitank MissileDocument4 pagesImaging Infrared Seeker or Antitank MissileRamesh SanilNo ratings yet
- Electronic Scanned Array DesignDocument357 pagesElectronic Scanned Array DesignvasikasNo ratings yet
- Upkar Radar EngineeringDocument9 pagesUpkar Radar Engineeringjeravi84No ratings yet
- X Band T/R Modules: ApplicationsDocument2 pagesX Band T/R Modules: ApplicationsHassan MehmoodNo ratings yet
- Estimating The GNSS Broadcast Ephemeris Error - PaperDocument4 pagesEstimating The GNSS Broadcast Ephemeris Error - PaperSebastian CiubanNo ratings yet
- SARDocument204 pagesSARArash MazandaraniNo ratings yet
- MIMO Radar: Snake Oil or Good Idea?: RaytheonDocument5 pagesMIMO Radar: Snake Oil or Good Idea?: RaytheontianNo ratings yet
- Direction of Arrival Estimation AlgorithmsDocument14 pagesDirection of Arrival Estimation AlgorithmsilgisizalakasizNo ratings yet
- AN - AAR-47A (V) 2 Electro-Optic Missile and Laser Warning SystemDocument2 pagesAN - AAR-47A (V) 2 Electro-Optic Missile and Laser Warning Systemsd_hosseini_88No ratings yet
- جزوه درس رادارDocument121 pagesجزوه درس رادارbahram bahramiNo ratings yet
- Aesa Rbe2: Aesa Radar For The Rafale, The Omnirole FighterDocument2 pagesAesa Rbe2: Aesa Radar For The Rafale, The Omnirole FighterAfeef Ibn AlbraNo ratings yet
- Millimeter-Wavelength RadarsDocument17 pagesMillimeter-Wavelength RadarsbingwazzupNo ratings yet
- Multi-Channel Transmit/receive Modules For X-Band AesaDocument3 pagesMulti-Channel Transmit/receive Modules For X-Band AesaDhimas AfihandarinNo ratings yet
- Grifo eDocument2 pagesGrifo eManuel SolisNo ratings yet
- Exam 2016 RadarDocument13 pagesExam 2016 Radaradib50% (2)
- Design of FMCW Radars For Active Safety Applications PDFDocument5 pagesDesign of FMCW Radars For Active Safety Applications PDFAnonymous LoJy6ERXdNo ratings yet
- Adaptive Active Phased Array Radar PresentationDocument17 pagesAdaptive Active Phased Array Radar PresentationHarika Kilari50% (2)
- Introduction To Radar Systems - 2014Document38 pagesIntroduction To Radar Systems - 2014lfsa90No ratings yet
- Effect of The Internet-Of-Things On Fire Control and Weapon SystemsDocument20 pagesEffect of The Internet-Of-Things On Fire Control and Weapon SystemsMimidbe BibiNo ratings yet
- Fact Sheet - Bill BoardDocument2 pagesFact Sheet - Bill BoardNick NumlkNo ratings yet
- A DarterDocument2 pagesA DarterManuel SolisNo ratings yet
- HIAST-A.Taha-Radar Systems Ebook-2017 PDFDocument399 pagesHIAST-A.Taha-Radar Systems Ebook-2017 PDFisam_702No ratings yet
- Grifo e MM08942 LQ PDFDocument2 pagesGrifo e MM08942 LQ PDFToufeeque AhmedNo ratings yet
- DRFM Basic PaperDocument7 pagesDRFM Basic PaperAjinkya Kale100% (1)
- MmwaveSensing FMCW Offlineviewing 0Document70 pagesMmwaveSensing FMCW Offlineviewing 0ppengNo ratings yet
- Real Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitDocument10 pagesReal Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitAI Coordinator - CSC JournalsNo ratings yet
- MIMO Radar A Idea Whose Time Has ComeDocument8 pagesMIMO Radar A Idea Whose Time Has Cometrongnguyen29No ratings yet
- ADS B TechnologiesDocument21 pagesADS B TechnologiesthanNo ratings yet
- Final ReportDocument43 pagesFinal ReportRajat RathiNo ratings yet
- Range Resolution Improvement of FMCW RadarsDocument104 pagesRange Resolution Improvement of FMCW RadarsLe Duy Trung0% (1)
- Cyient Transmit and Receive Module For Radar SystemsDocument4 pagesCyient Transmit and Receive Module For Radar SystemsPercy100% (1)
- Black Box ReportDocument24 pagesBlack Box ReportYashasCRNo ratings yet
- Micro PDFDocument55 pagesMicro PDFHem BhattaraiNo ratings yet
- Raytheon Technology Today 2004 - IssueDocument32 pagesRaytheon Technology Today 2004 - Issueparadizer100% (1)
- (2005) Advances in Active Radar Seeker TechnologyDocument8 pages(2005) Advances in Active Radar Seeker TechnologyAlex Yang100% (2)
- Infrared Quantum DotsDocument8 pagesInfrared Quantum DotsfaradeyisaheroNo ratings yet
- Passive and Low Frequency RadarDocument11 pagesPassive and Low Frequency RadarzaheermechNo ratings yet
- Sar Uav PDFDocument24 pagesSar Uav PDFadityaNo ratings yet
- Fire Vixen 500e Fire ControlDocument2 pagesFire Vixen 500e Fire ControlwyrumaNo ratings yet
- Global Positioning Systems, Inertial Navigation, and IntegrationFrom EverandGlobal Positioning Systems, Inertial Navigation, and IntegrationNo ratings yet
- 24 Radar PDFDocument11 pages24 Radar PDFMohd AhfazNo ratings yet
- Multi-Channel Transmit/receive Modules For X-Band AesaDocument3 pagesMulti-Channel Transmit/receive Modules For X-Band AesaDhimas AfihandarinNo ratings yet
- 4th Generation Nukes 1Document54 pages4th Generation Nukes 1lipsmalloyNo ratings yet
- ADA241165-Soviet Weapon Systems AcquisitionDocument91 pagesADA241165-Soviet Weapon Systems AcquisitionDhimas AfihandarinNo ratings yet
- SAAB IRST, The System and Flight TrialsDocument15 pagesSAAB IRST, The System and Flight TrialsDhimas AfihandarinNo ratings yet
- SFRJ ProjectileDocument21 pagesSFRJ ProjectileDhimas Afihandarin100% (1)
- Mission Success Probability of HypersonicsDocument6 pagesMission Success Probability of HypersonicsDhimas AfihandarinNo ratings yet
- Historical Overview of Phased Array Antennas For Defense Application in JapanDocument5 pagesHistorical Overview of Phased Array Antennas For Defense Application in JapanDhimas AfihandarinNo ratings yet
- Vendetta - Long Range Deep PenetratorDocument98 pagesVendetta - Long Range Deep PenetratorDhimas Afihandarin100% (1)
- Andre Gsponer - Fourth Generation Nuclear Weapons: Military Effectiveness and Collateral EffectsDocument54 pagesAndre Gsponer - Fourth Generation Nuclear Weapons: Military Effectiveness and Collateral EffectsGinertgNo ratings yet
- Merdeka Dutch Military Operations in Indonesia 1945 1950Document70 pagesMerdeka Dutch Military Operations in Indonesia 1945 1950Dhimas AfihandarinNo ratings yet
- Counting The Weapons. American Spy SatelliteDocument11 pagesCounting The Weapons. American Spy SatelliteDhimas AfihandarinNo ratings yet
- Atomic Powered Submarine Design Chapter 8 V M BukalovDocument52 pagesAtomic Powered Submarine Design Chapter 8 V M BukalovPeter AngeloNo ratings yet
- Correction To f16 Pulse Doppler Radar Anapg66 Performance - 1983Document1 pageCorrection To f16 Pulse Doppler Radar Anapg66 Performance - 1983Dhimas AfihandarinNo ratings yet
- F-16 Pulse Doppler Radar (AN/APG-66) Performance-1983Document12 pagesF-16 Pulse Doppler Radar (AN/APG-66) Performance-1983Dhimas Afihandarin100% (2)
- DuPlessis Extended (2009) - Cross Eye JammerDocument4 pagesDuPlessis Extended (2009) - Cross Eye JammerDhimas AfihandarinNo ratings yet
- Immoreev, I. - Active Transmitting Phased Antenna ArraysDocument14 pagesImmoreev, I. - Active Transmitting Phased Antenna ArraysDhimas AfihandarinNo ratings yet
- AESA Radar Calculator-The User's Read-Preliminary VersionDocument2 pagesAESA Radar Calculator-The User's Read-Preliminary VersionDhimas Afihandarin100% (2)
- Campbell, P. - Comments On - Energy Stored in Permanent MagnetsDocument3 pagesCampbell, P. - Comments On - Energy Stored in Permanent MagnetsDhimas AfihandarinNo ratings yet
- Volume Surveillance Radar Frequency SelectionDocument6 pagesVolume Surveillance Radar Frequency SelectionDhimas AfihandarinNo ratings yet
- Cruise Missile DefenseDocument51 pagesCruise Missile DefenseDhimas Afihandarin100% (1)
- ChineseDocument3 pagesChineseDhimas AfihandarinNo ratings yet
- Survey of Russian Low Cost Phased ArrayDocument5 pagesSurvey of Russian Low Cost Phased ArrayDhimas Afihandarin100% (1)
- Kuschel, H. VHF-UHF Radar: Part 2. Operational Aspects and ApplicationsDocument11 pagesKuschel, H. VHF-UHF Radar: Part 2. Operational Aspects and ApplicationsDhimas Afihandarin100% (1)
- Kuschel, H. - VHF - UHF Radar. 1. CharacteristicsDocument12 pagesKuschel, H. - VHF - UHF Radar. 1. CharacteristicsDhimas AfihandarinNo ratings yet
- LCDR Nate "Hyber" Marler Advanced Weapons Lab, VX-31 China Lake, CaDocument51 pagesLCDR Nate "Hyber" Marler Advanced Weapons Lab, VX-31 China Lake, CaDhimas Afihandarin100% (4)
- RadBase2 Tech PaperDocument10 pagesRadBase2 Tech PaperDhimas AfihandarinNo ratings yet
- The Advanced Simulation System For MMW Imaging Radar Seeker Onboard Air-To-Air MissileDocument4 pagesThe Advanced Simulation System For MMW Imaging Radar Seeker Onboard Air-To-Air MissileDhimas AfihandarinNo ratings yet
- Cellmax-D-Cpuse: Electrical SpecificationsDocument3 pagesCellmax-D-Cpuse: Electrical Specificationsjosetb_hNo ratings yet
- MCWC GTU Study Material Presentations Unit-2 25072021031051PMDocument36 pagesMCWC GTU Study Material Presentations Unit-2 25072021031051PMjigneshNo ratings yet
- AAU3911 Hardware Description (04) (PDF) - enDocument64 pagesAAU3911 Hardware Description (04) (PDF) - enMd Ataulla64% (11)
- Evs27 2440228Document9 pagesEvs27 2440228jhabNo ratings yet
- EF-140S and EF-140S/H: 40 Meter Linear Loaded DipoleDocument26 pagesEF-140S and EF-140S/H: 40 Meter Linear Loaded Dipolesboonuy331No ratings yet
- EE609 Lect-6-2023 Horn ReflectorDocument25 pagesEE609 Lect-6-2023 Horn Reflectorgargbansalpulkit100% (1)
- Design and Analysis of An Active Integrated AntennaDocument58 pagesDesign and Analysis of An Active Integrated AntennaAli AliNo ratings yet
- LTE Optimization GuidelineDocument55 pagesLTE Optimization GuidelineJairo Fabian Basto ParedesNo ratings yet
- MGL Avionics V16 Aviation Band Transceiver User and Installation ManualDocument25 pagesMGL Avionics V16 Aviation Band Transceiver User and Installation ManualAlexandruNo ratings yet
- S800 User Manual (ENG)Document35 pagesS800 User Manual (ENG)Andri DikaNo ratings yet
- Microstrip Patch AntennaDocument5 pagesMicrostrip Patch Antennamsh-666No ratings yet
- A Women SafetyDocument3 pagesA Women Safetyhamed razaNo ratings yet
- Apxvll14h - 43 C I20Document3 pagesApxvll14h - 43 C I20Cami GenaroNo ratings yet
- 2G6WF 00VDocument4 pages2G6WF 00VHoang DoNo ratings yet
- Gate 2016 Questions and AnswersDocument29 pagesGate 2016 Questions and AnswersRavi AnnepakaNo ratings yet
- Odp-090r16bv 17KV PDFDocument1 pageOdp-090r16bv 17KV PDFAlberto LinaresNo ratings yet
- Test Report Part 22 PDFDocument31 pagesTest Report Part 22 PDFPabl OrozkoNo ratings yet
- CV65CSX-M Product SpecificationsDocument5 pagesCV65CSX-M Product Specificationsnivesh vermaNo ratings yet
- PCB Antenna TheoryDocument26 pagesPCB Antenna TheoryEdmundo Eduardo Lashley100% (1)
- Sirio VHF Uhf 2019Document60 pagesSirio VHF Uhf 2019Noor M.SNo ratings yet
- KPI Optimization Test Plan For LTEDocument42 pagesKPI Optimization Test Plan For LTEhuzaif zahoorNo ratings yet
- Motorola PTP 800 Series 02-04 User GuideDocument391 pagesMotorola PTP 800 Series 02-04 User GuideDaniel Xavier Oliveira Dos SantosNo ratings yet
- Cellmax o CpuseDocument2 pagesCellmax o CpuseMarcos GrabicoskiNo ratings yet
- Cma-B/3324: GSM / Cdma: 1800, 1900 & 2100Document1 pageCma-B/3324: GSM / Cdma: 1800, 1900 & 2100susah emailNo ratings yet
- Intro MicrowaveDocument16 pagesIntro Microwaveclaudinejene.reyes25No ratings yet
- Extc Sem6 SyllabusDocument50 pagesExtc Sem6 SyllabusVIRENDRA KUMAR SAHUNo ratings yet
- Designer PolarizationDocument9 pagesDesigner Polarizationravi010582No ratings yet