
Sensor Fault Detection and Diagnosis For Autonomous Systems: January 2013
Sensor Fault Detection and Diagnosis For Autonomous Systems: January 2013
You might also like
- Actionable Performance MeasurementDocument296 pagesActionable Performance Measurementajaydeshpande2001100% (1)
- Driller: Augmenting Fuzzing Through Selective Symbolic ExecutionDocument16 pagesDriller: Augmenting Fuzzing Through Selective Symbolic ExecutionchoaybNo ratings yet
- NRI-Small: Improved Safety and Reliability of Robotic Systems by Faults/anomalies Detection From Uninterpreted Signals of Computation GraphsDocument19 pagesNRI-Small: Improved Safety and Reliability of Robotic Systems by Faults/anomalies Detection From Uninterpreted Signals of Computation GraphspsupridamuNo ratings yet
- ERTS2020 Paper 92Document4 pagesERTS2020 Paper 92tim jonesNo ratings yet
- Fault Detection and Isolation in Robotic Manipulator Via Hybrid Neural NetworksDocument12 pagesFault Detection and Isolation in Robotic Manipulator Via Hybrid Neural Networksnick4nameNo ratings yet
- Semantic Anomaly Detection With Large Language ModelsDocument27 pagesSemantic Anomaly Detection With Large Language ModelsimeemkhNo ratings yet
- Multisensor Feature Fusion For Bearing Fault Diagnosis Using Sparse Autoencoder and Deep Belief NetworkDocument10 pagesMultisensor Feature Fusion For Bearing Fault Diagnosis Using Sparse Autoencoder and Deep Belief NetworksagarduttaNo ratings yet
- Lectura Numerical Methods SimulationDocument13 pagesLectura Numerical Methods SimulationalexNo ratings yet
- Learningspecs TechreportDocument14 pagesLearningspecs TechreportExpForResearch expforresearchNo ratings yet
- Cabral 2019Document12 pagesCabral 2019Gustavo VianaNo ratings yet
- Fault Detection & Diagnosis For Small Uavs Via Machine LearningDocument6 pagesFault Detection & Diagnosis For Small Uavs Via Machine LearningergunesozlmNo ratings yet
- Gao 2015Document11 pagesGao 2015Tavi GrigNo ratings yet
- 1 s2.0 S0020025520308422 MainDocument20 pages1 s2.0 S0020025520308422 Mainjymcrusher42No ratings yet
- Deep State Inference Toward Behavioral Model Inference of Black-Box Software SystemsDocument16 pagesDeep State Inference Toward Behavioral Model Inference of Black-Box Software SystemsomanNo ratings yet
- ST Module - 4Document54 pagesST Module - 4Dbit DocsNo ratings yet
- Real-Time Obstacle Detection and Tracking For Sense-And-Avoid Mechanism in UavsDocument13 pagesReal-Time Obstacle Detection and Tracking For Sense-And-Avoid Mechanism in UavsRazvanHaragNo ratings yet
- Learning To Calibrate: Reinforcement Learning For Guided Calibration of Visual-Inertial RigsDocument15 pagesLearning To Calibrate: Reinforcement Learning For Guided Calibration of Visual-Inertial Rigsriyanto riyantoNo ratings yet
- Faults Diagnosis in Robot SystemsDocument12 pagesFaults Diagnosis in Robot Systemsfahd ghabiNo ratings yet
- A Survey On Fault Injection TechniquesDocument16 pagesA Survey On Fault Injection TechniquesMustafamna Al SalamNo ratings yet
- Testing Embedded SoftwareDocument34 pagesTesting Embedded SoftwaresonNo ratings yet
- Collision Avoidance in Multi-Robot Systems: Chengtao Cai and Chunsheng Yang Qidan Zhu and Yanhua LiangDocument6 pagesCollision Avoidance in Multi-Robot Systems: Chengtao Cai and Chunsheng Yang Qidan Zhu and Yanhua Liangshyam SaravananNo ratings yet
- Woot KoscherDocument10 pagesWoot KoscherEva ZemlyaNo ratings yet
- Shah 2011Document5 pagesShah 2011Chandru AizzuNo ratings yet
- Van 2015Document22 pagesVan 2015HowlNo ratings yet
- ISA Transactions: Alireza Abbaspour, Payam Aboutalebi, Kang K. Yen, Arman SargolzaeiDocument13 pagesISA Transactions: Alireza Abbaspour, Payam Aboutalebi, Kang K. Yen, Arman SargolzaeiHipólito AguilarNo ratings yet
- Cluster Computing For Neural Network Based Anomaly DetectionDocument5 pagesCluster Computing For Neural Network Based Anomaly Detectionpragya jhaNo ratings yet
- Virtual Assembly SystemsDocument1 pageVirtual Assembly Systemsketan3kNo ratings yet
- RAVAGE: Post-Silicon Validation of Mixed Signal Systems Using Genetic Stimulus Evolution and Model TuningDocument6 pagesRAVAGE: Post-Silicon Validation of Mixed Signal Systems Using Genetic Stimulus Evolution and Model TuningGiacomoverNo ratings yet
- A Tutorial On Visual Servo ControlDocument20 pagesA Tutorial On Visual Servo ControlAlberto NicolottiNo ratings yet
- Using Architectural Runtime Verification For Offline Data AnalysisDocument14 pagesUsing Architectural Runtime Verification For Offline Data AnalysisLars StockmannNo ratings yet
- A Survey of Fault Diagnosis and Fault-Tolerant Techniques-Part I: Fault Diagnosis With Model-Based and Signal-Based ApproachesDocument11 pagesA Survey of Fault Diagnosis and Fault-Tolerant Techniques-Part I: Fault Diagnosis With Model-Based and Signal-Based ApproachesBeto MayoNo ratings yet
- Sensors 24 00429 v2Document14 pagesSensors 24 00429 v2Tawanda GotozaNo ratings yet
- Distributed Fault Detection of Wireless Sensor Networks: Jinran Chen, Shubha Kher, and Arun SomaniDocument7 pagesDistributed Fault Detection of Wireless Sensor Networks: Jinran Chen, Shubha Kher, and Arun SomaniBalaji SrikanthNo ratings yet
- Resources 1Document16 pagesResources 1Mohammed AbdulreamNo ratings yet
- A Study of The Internal and External Effects of Concurrency BugsDocument10 pagesA Study of The Internal and External Effects of Concurrency BugskyooNo ratings yet
- A Simulator For Robot Navigation Algorithms: Michael A. Folcik and Bijan KarimiDocument6 pagesA Simulator For Robot Navigation Algorithms: Michael A. Folcik and Bijan KarimitechlabNo ratings yet
- 3Document6 pages3Samuel HamiltonNo ratings yet
- 1 s2.0 S0167404809000893 MainDocument16 pages1 s2.0 S0167404809000893 MainExpForResearch expforresearchNo ratings yet
- Real-Time Human Detection in Uncontrolled Camera Motion EnvironmentsDocument7 pagesReal-Time Human Detection in Uncontrolled Camera Motion EnvironmentsSaeideh OraeiNo ratings yet
- A Review of Probabilistic Map Based TechniquesDocument9 pagesA Review of Probabilistic Map Based TechniquesNguyễn Trường GiangNo ratings yet
- A Robust Observer For Sensor Faults Estimation On n-DOF Manipulator in Constrained Framework EnvironmentDocument13 pagesA Robust Observer For Sensor Faults Estimation On n-DOF Manipulator in Constrained Framework EnvironmentNinh DuyNo ratings yet
- A New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksDocument9 pagesA New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksRobert MaximilianNo ratings yet
- Nhan IEEEPowerandEnergyTechnologySystemsJournalDocument12 pagesNhan IEEEPowerandEnergyTechnologySystemsJournalNikole BaezNo ratings yet
- Anomaly Detection in Multi-Agent Trajectories For Automated DrivingDocument15 pagesAnomaly Detection in Multi-Agent Trajectories For Automated DrivingXin LiNo ratings yet
- Chowkidar A Health Monitor For Wireless Sensor Network TestbedsDocument10 pagesChowkidar A Health Monitor For Wireless Sensor Network TestbedsjamesNo ratings yet
- 2.1 Existing SystemDocument43 pages2.1 Existing SystemUDAY SOLUTIONSNo ratings yet
- Cores That Don't CountDocument8 pagesCores That Don't CountGary Ryan DonovanNo ratings yet
- Annual Reviews in Control: Khaoula Tidriri, Nizar Chatti, Sylvain Verron, Teodor TiplicaDocument19 pagesAnnual Reviews in Control: Khaoula Tidriri, Nizar Chatti, Sylvain Verron, Teodor TiplicaHusnain AliNo ratings yet
- The Proposed Design of The Monitoring System For Security Breaches of Buildings Based On Behavioral TrackingDocument5 pagesThe Proposed Design of The Monitoring System For Security Breaches of Buildings Based On Behavioral TrackingGabou BassNo ratings yet
- A Survey of Fault Diagnosis and Fault-Tolerant TechniquesPart I Fault Diagnosis With Model-Based and Signal-Based ApproachesDocument11 pagesA Survey of Fault Diagnosis and Fault-Tolerant TechniquesPart I Fault Diagnosis With Model-Based and Signal-Based Approachesowais khanNo ratings yet
- Peerj Cs 1709Document26 pagesPeerj Cs 1709mueenNo ratings yet
- A Multi Model Approach A Data Engineering Driven Pipeline Model For Detecting Anomaly in Sensor Data Using Stacked LSTMDocument8 pagesA Multi Model Approach A Data Engineering Driven Pipeline Model For Detecting Anomaly in Sensor Data Using Stacked LSTMIJRASETPublicationsNo ratings yet
- Ullah 2019Document6 pagesUllah 2019Dinar TASNo ratings yet
- Process Framework: Basic PrinciplesDocument33 pagesProcess Framework: Basic PrinciplesLikhith NNo ratings yet
- An Artificial Neural Network For Automated Fault DetectionDocument7 pagesAn Artificial Neural Network For Automated Fault DetectionAndemariamNo ratings yet
- 1 On Fault Detection and Isolation Applied On Unicycle Mobile RobotDocument7 pages1 On Fault Detection and Isolation Applied On Unicycle Mobile Robotfahd ghabiNo ratings yet
- Robot Localization Ias13 Revised PDFDocument6 pagesRobot Localization Ias13 Revised PDFKamal NathanNo ratings yet
- Robot Localization Ias13 RevisedDocument6 pagesRobot Localization Ias13 RevisedaurelioktaNo ratings yet
- Penetration Testing Fundamentals-2: Penetration Testing Study Guide To Breaking Into SystemsFrom EverandPenetration Testing Fundamentals-2: Penetration Testing Study Guide To Breaking Into SystemsNo ratings yet
- Robot Operating System (ROS): The Complete Reference (Volume 6)From EverandRobot Operating System (ROS): The Complete Reference (Volume 6)No ratings yet
- Automatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionFrom EverandAutomatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionNo ratings yet
- Shopping Is FunDocument10 pagesShopping Is FunPATRICK SU YI SHANG MoeNo ratings yet
- Innovate 3ZZ3 - Welcome and Survey On Team PreferencesDocument1 pageInnovate 3ZZ3 - Welcome and Survey On Team PreferencesDan KlausnerNo ratings yet
- 61863e Ladder Language Programming ManualDocument40 pages61863e Ladder Language Programming ManualSang Nguyễn BáNo ratings yet
- PanasonicDocument55 pagesPanasonicHuy TranNo ratings yet
- Arrays & Strings Pactice Problems ClassDocument5 pagesArrays & Strings Pactice Problems ClassrakeshNo ratings yet
- HSBCDocument3 pagesHSBCOmid PtokNo ratings yet
- Manual Programacion PhoenixDocument106 pagesManual Programacion Phoenixlucho0314No ratings yet
- C DilmDocument61 pagesC DilmotavioalcaldeNo ratings yet
- PC-3000-Flash (4.0) RussiaDocument2 pagesPC-3000-Flash (4.0) RussiaRajesh DhanambalNo ratings yet
- Chapter 10 - Capacitors: Introductory Circuit Analysis Robert L. BoylestadDocument27 pagesChapter 10 - Capacitors: Introductory Circuit Analysis Robert L. Boylestadakankshag_13No ratings yet
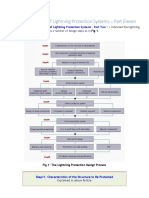
- Design Calculations of Lightning Protection Systems - Part ElevenDocument37 pagesDesign Calculations of Lightning Protection Systems - Part ElevenHansika RajapakshaNo ratings yet
- Fireeye Email Security Server Edition: Data SheetDocument7 pagesFireeye Email Security Server Edition: Data SheetNADERNo ratings yet
- SG 4 VPNDocument2 pagesSG 4 VPNinvoker14No ratings yet
- Questions On Tcp/IpDocument25 pagesQuestions On Tcp/IpchandrashekarNo ratings yet
- Honeywell Alarmnet Internet FaqsDocument2 pagesHoneywell Alarmnet Internet FaqsAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- PR02 - New PlantPAx Systems Checklist and Verification Tools ROKTechED 2016Document32 pagesPR02 - New PlantPAx Systems Checklist and Verification Tools ROKTechED 2016Marcio Issao WatanabeNo ratings yet
- API GovernanceDocument7 pagesAPI Governancetamiloppo321No ratings yet
- Think 2 Unit 4 Sample UnitDocument10 pagesThink 2 Unit 4 Sample UnitCandelaria Luque100% (1)
- Lesson 11 Multiple Linear RegressionDocument35 pagesLesson 11 Multiple Linear RegressionbatmaninclashNo ratings yet
- CHP 5 SimplexDocument36 pagesCHP 5 SimplexQnah Abdul MoinNo ratings yet
- Kalloo 2011Document18 pagesKalloo 2011Nhóm 10 tin họcNo ratings yet
- Diptrace TutorialDocument221 pagesDiptrace TutorialAviraj GhanekarNo ratings yet
- A Comparative Study of Online Learning and Traditional Learning Among Grade 11 Abm Students in St. Clare CollegeDocument35 pagesA Comparative Study of Online Learning and Traditional Learning Among Grade 11 Abm Students in St. Clare College11D3 CHUA , Jasmine B.No ratings yet
- Melissa Van Balen ResumeDocument3 pagesMelissa Van Balen Resumeapi-315598529No ratings yet
- LTE OMC Functions IntroductionDocument46 pagesLTE OMC Functions IntroductionDativaNo ratings yet
- The Key Element For Your ProcessDocument18 pagesThe Key Element For Your ProcessSantiNo ratings yet
- Registration - Test - CaseDocument4 pagesRegistration - Test - Casegoga1234No ratings yet
- Data Structures Using Java - Lab ManualDocument48 pagesData Structures Using Java - Lab Manualkishore kumar80% (5)
- TBC ResourcesDocument49 pagesTBC Resourcesyuri Paul Castañeda BaldaNo ratings yet























































































Download as pdf or txt
You might also like
- Actionable Performance MeasurementDocument296 pagesActionable Performance Measurementajaydeshpande2001100% (1)
- Driller: Augmenting Fuzzing Through Selective Symbolic ExecutionDocument16 pagesDriller: Augmenting Fuzzing Through Selective Symbolic ExecutionchoaybNo ratings yet
- NRI-Small: Improved Safety and Reliability of Robotic Systems by Faults/anomalies Detection From Uninterpreted Signals of Computation GraphsDocument19 pagesNRI-Small: Improved Safety and Reliability of Robotic Systems by Faults/anomalies Detection From Uninterpreted Signals of Computation GraphspsupridamuNo ratings yet
- ERTS2020 Paper 92Document4 pagesERTS2020 Paper 92tim jonesNo ratings yet
- Fault Detection and Isolation in Robotic Manipulator Via Hybrid Neural NetworksDocument12 pagesFault Detection and Isolation in Robotic Manipulator Via Hybrid Neural Networksnick4nameNo ratings yet
- Semantic Anomaly Detection With Large Language ModelsDocument27 pagesSemantic Anomaly Detection With Large Language ModelsimeemkhNo ratings yet
- Multisensor Feature Fusion For Bearing Fault Diagnosis Using Sparse Autoencoder and Deep Belief NetworkDocument10 pagesMultisensor Feature Fusion For Bearing Fault Diagnosis Using Sparse Autoencoder and Deep Belief NetworksagarduttaNo ratings yet
- Lectura Numerical Methods SimulationDocument13 pagesLectura Numerical Methods SimulationalexNo ratings yet
- Learningspecs TechreportDocument14 pagesLearningspecs TechreportExpForResearch expforresearchNo ratings yet
- Cabral 2019Document12 pagesCabral 2019Gustavo VianaNo ratings yet
- Fault Detection & Diagnosis For Small Uavs Via Machine LearningDocument6 pagesFault Detection & Diagnosis For Small Uavs Via Machine LearningergunesozlmNo ratings yet
- Gao 2015Document11 pagesGao 2015Tavi GrigNo ratings yet
- 1 s2.0 S0020025520308422 MainDocument20 pages1 s2.0 S0020025520308422 Mainjymcrusher42No ratings yet
- Deep State Inference Toward Behavioral Model Inference of Black-Box Software SystemsDocument16 pagesDeep State Inference Toward Behavioral Model Inference of Black-Box Software SystemsomanNo ratings yet
- ST Module - 4Document54 pagesST Module - 4Dbit DocsNo ratings yet
- Real-Time Obstacle Detection and Tracking For Sense-And-Avoid Mechanism in UavsDocument13 pagesReal-Time Obstacle Detection and Tracking For Sense-And-Avoid Mechanism in UavsRazvanHaragNo ratings yet
- Learning To Calibrate: Reinforcement Learning For Guided Calibration of Visual-Inertial RigsDocument15 pagesLearning To Calibrate: Reinforcement Learning For Guided Calibration of Visual-Inertial Rigsriyanto riyantoNo ratings yet
- Faults Diagnosis in Robot SystemsDocument12 pagesFaults Diagnosis in Robot Systemsfahd ghabiNo ratings yet
- A Survey On Fault Injection TechniquesDocument16 pagesA Survey On Fault Injection TechniquesMustafamna Al SalamNo ratings yet
- Testing Embedded SoftwareDocument34 pagesTesting Embedded SoftwaresonNo ratings yet
- Collision Avoidance in Multi-Robot Systems: Chengtao Cai and Chunsheng Yang Qidan Zhu and Yanhua LiangDocument6 pagesCollision Avoidance in Multi-Robot Systems: Chengtao Cai and Chunsheng Yang Qidan Zhu and Yanhua Liangshyam SaravananNo ratings yet
- Woot KoscherDocument10 pagesWoot KoscherEva ZemlyaNo ratings yet
- Shah 2011Document5 pagesShah 2011Chandru AizzuNo ratings yet
- Van 2015Document22 pagesVan 2015HowlNo ratings yet
- ISA Transactions: Alireza Abbaspour, Payam Aboutalebi, Kang K. Yen, Arman SargolzaeiDocument13 pagesISA Transactions: Alireza Abbaspour, Payam Aboutalebi, Kang K. Yen, Arman SargolzaeiHipólito AguilarNo ratings yet
- Cluster Computing For Neural Network Based Anomaly DetectionDocument5 pagesCluster Computing For Neural Network Based Anomaly Detectionpragya jhaNo ratings yet
- Virtual Assembly SystemsDocument1 pageVirtual Assembly Systemsketan3kNo ratings yet
- RAVAGE: Post-Silicon Validation of Mixed Signal Systems Using Genetic Stimulus Evolution and Model TuningDocument6 pagesRAVAGE: Post-Silicon Validation of Mixed Signal Systems Using Genetic Stimulus Evolution and Model TuningGiacomoverNo ratings yet
- A Tutorial On Visual Servo ControlDocument20 pagesA Tutorial On Visual Servo ControlAlberto NicolottiNo ratings yet
- Using Architectural Runtime Verification For Offline Data AnalysisDocument14 pagesUsing Architectural Runtime Verification For Offline Data AnalysisLars StockmannNo ratings yet
- A Survey of Fault Diagnosis and Fault-Tolerant Techniques-Part I: Fault Diagnosis With Model-Based and Signal-Based ApproachesDocument11 pagesA Survey of Fault Diagnosis and Fault-Tolerant Techniques-Part I: Fault Diagnosis With Model-Based and Signal-Based ApproachesBeto MayoNo ratings yet
- Sensors 24 00429 v2Document14 pagesSensors 24 00429 v2Tawanda GotozaNo ratings yet
- Distributed Fault Detection of Wireless Sensor Networks: Jinran Chen, Shubha Kher, and Arun SomaniDocument7 pagesDistributed Fault Detection of Wireless Sensor Networks: Jinran Chen, Shubha Kher, and Arun SomaniBalaji SrikanthNo ratings yet
- Resources 1Document16 pagesResources 1Mohammed AbdulreamNo ratings yet
- A Study of The Internal and External Effects of Concurrency BugsDocument10 pagesA Study of The Internal and External Effects of Concurrency BugskyooNo ratings yet
- A Simulator For Robot Navigation Algorithms: Michael A. Folcik and Bijan KarimiDocument6 pagesA Simulator For Robot Navigation Algorithms: Michael A. Folcik and Bijan KarimitechlabNo ratings yet
- 3Document6 pages3Samuel HamiltonNo ratings yet
- 1 s2.0 S0167404809000893 MainDocument16 pages1 s2.0 S0167404809000893 MainExpForResearch expforresearchNo ratings yet
- Real-Time Human Detection in Uncontrolled Camera Motion EnvironmentsDocument7 pagesReal-Time Human Detection in Uncontrolled Camera Motion EnvironmentsSaeideh OraeiNo ratings yet
- A Review of Probabilistic Map Based TechniquesDocument9 pagesA Review of Probabilistic Map Based TechniquesNguyễn Trường GiangNo ratings yet
- A Robust Observer For Sensor Faults Estimation On n-DOF Manipulator in Constrained Framework EnvironmentDocument13 pagesA Robust Observer For Sensor Faults Estimation On n-DOF Manipulator in Constrained Framework EnvironmentNinh DuyNo ratings yet
- A New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksDocument9 pagesA New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksRobert MaximilianNo ratings yet
- Nhan IEEEPowerandEnergyTechnologySystemsJournalDocument12 pagesNhan IEEEPowerandEnergyTechnologySystemsJournalNikole BaezNo ratings yet
- Anomaly Detection in Multi-Agent Trajectories For Automated DrivingDocument15 pagesAnomaly Detection in Multi-Agent Trajectories For Automated DrivingXin LiNo ratings yet
- Chowkidar A Health Monitor For Wireless Sensor Network TestbedsDocument10 pagesChowkidar A Health Monitor For Wireless Sensor Network TestbedsjamesNo ratings yet
- 2.1 Existing SystemDocument43 pages2.1 Existing SystemUDAY SOLUTIONSNo ratings yet
- Cores That Don't CountDocument8 pagesCores That Don't CountGary Ryan DonovanNo ratings yet
- Annual Reviews in Control: Khaoula Tidriri, Nizar Chatti, Sylvain Verron, Teodor TiplicaDocument19 pagesAnnual Reviews in Control: Khaoula Tidriri, Nizar Chatti, Sylvain Verron, Teodor TiplicaHusnain AliNo ratings yet
- The Proposed Design of The Monitoring System For Security Breaches of Buildings Based On Behavioral TrackingDocument5 pagesThe Proposed Design of The Monitoring System For Security Breaches of Buildings Based On Behavioral TrackingGabou BassNo ratings yet
- A Survey of Fault Diagnosis and Fault-Tolerant TechniquesPart I Fault Diagnosis With Model-Based and Signal-Based ApproachesDocument11 pagesA Survey of Fault Diagnosis and Fault-Tolerant TechniquesPart I Fault Diagnosis With Model-Based and Signal-Based Approachesowais khanNo ratings yet
- Peerj Cs 1709Document26 pagesPeerj Cs 1709mueenNo ratings yet
- A Multi Model Approach A Data Engineering Driven Pipeline Model For Detecting Anomaly in Sensor Data Using Stacked LSTMDocument8 pagesA Multi Model Approach A Data Engineering Driven Pipeline Model For Detecting Anomaly in Sensor Data Using Stacked LSTMIJRASETPublicationsNo ratings yet
- Ullah 2019Document6 pagesUllah 2019Dinar TASNo ratings yet
- Process Framework: Basic PrinciplesDocument33 pagesProcess Framework: Basic PrinciplesLikhith NNo ratings yet
- An Artificial Neural Network For Automated Fault DetectionDocument7 pagesAn Artificial Neural Network For Automated Fault DetectionAndemariamNo ratings yet
- 1 On Fault Detection and Isolation Applied On Unicycle Mobile RobotDocument7 pages1 On Fault Detection and Isolation Applied On Unicycle Mobile Robotfahd ghabiNo ratings yet
- Robot Localization Ias13 Revised PDFDocument6 pagesRobot Localization Ias13 Revised PDFKamal NathanNo ratings yet
- Robot Localization Ias13 RevisedDocument6 pagesRobot Localization Ias13 RevisedaurelioktaNo ratings yet
- Penetration Testing Fundamentals-2: Penetration Testing Study Guide To Breaking Into SystemsFrom EverandPenetration Testing Fundamentals-2: Penetration Testing Study Guide To Breaking Into SystemsNo ratings yet
- Robot Operating System (ROS): The Complete Reference (Volume 6)From EverandRobot Operating System (ROS): The Complete Reference (Volume 6)No ratings yet
- Automatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionFrom EverandAutomatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionNo ratings yet
- Shopping Is FunDocument10 pagesShopping Is FunPATRICK SU YI SHANG MoeNo ratings yet
- Innovate 3ZZ3 - Welcome and Survey On Team PreferencesDocument1 pageInnovate 3ZZ3 - Welcome and Survey On Team PreferencesDan KlausnerNo ratings yet
- 61863e Ladder Language Programming ManualDocument40 pages61863e Ladder Language Programming ManualSang Nguyễn BáNo ratings yet
- PanasonicDocument55 pagesPanasonicHuy TranNo ratings yet
- Arrays & Strings Pactice Problems ClassDocument5 pagesArrays & Strings Pactice Problems ClassrakeshNo ratings yet
- HSBCDocument3 pagesHSBCOmid PtokNo ratings yet
- Manual Programacion PhoenixDocument106 pagesManual Programacion Phoenixlucho0314No ratings yet
- C DilmDocument61 pagesC DilmotavioalcaldeNo ratings yet
- PC-3000-Flash (4.0) RussiaDocument2 pagesPC-3000-Flash (4.0) RussiaRajesh DhanambalNo ratings yet
- Chapter 10 - Capacitors: Introductory Circuit Analysis Robert L. BoylestadDocument27 pagesChapter 10 - Capacitors: Introductory Circuit Analysis Robert L. Boylestadakankshag_13No ratings yet
- Design Calculations of Lightning Protection Systems - Part ElevenDocument37 pagesDesign Calculations of Lightning Protection Systems - Part ElevenHansika RajapakshaNo ratings yet
- Fireeye Email Security Server Edition: Data SheetDocument7 pagesFireeye Email Security Server Edition: Data SheetNADERNo ratings yet
- SG 4 VPNDocument2 pagesSG 4 VPNinvoker14No ratings yet
- Questions On Tcp/IpDocument25 pagesQuestions On Tcp/IpchandrashekarNo ratings yet
- Honeywell Alarmnet Internet FaqsDocument2 pagesHoneywell Alarmnet Internet FaqsAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- PR02 - New PlantPAx Systems Checklist and Verification Tools ROKTechED 2016Document32 pagesPR02 - New PlantPAx Systems Checklist and Verification Tools ROKTechED 2016Marcio Issao WatanabeNo ratings yet
- API GovernanceDocument7 pagesAPI Governancetamiloppo321No ratings yet
- Think 2 Unit 4 Sample UnitDocument10 pagesThink 2 Unit 4 Sample UnitCandelaria Luque100% (1)
- Lesson 11 Multiple Linear RegressionDocument35 pagesLesson 11 Multiple Linear RegressionbatmaninclashNo ratings yet
- CHP 5 SimplexDocument36 pagesCHP 5 SimplexQnah Abdul MoinNo ratings yet
- Kalloo 2011Document18 pagesKalloo 2011Nhóm 10 tin họcNo ratings yet
- Diptrace TutorialDocument221 pagesDiptrace TutorialAviraj GhanekarNo ratings yet
- A Comparative Study of Online Learning and Traditional Learning Among Grade 11 Abm Students in St. Clare CollegeDocument35 pagesA Comparative Study of Online Learning and Traditional Learning Among Grade 11 Abm Students in St. Clare College11D3 CHUA , Jasmine B.No ratings yet
- Melissa Van Balen ResumeDocument3 pagesMelissa Van Balen Resumeapi-315598529No ratings yet
- LTE OMC Functions IntroductionDocument46 pagesLTE OMC Functions IntroductionDativaNo ratings yet
- The Key Element For Your ProcessDocument18 pagesThe Key Element For Your ProcessSantiNo ratings yet
- Registration - Test - CaseDocument4 pagesRegistration - Test - Casegoga1234No ratings yet
- Data Structures Using Java - Lab ManualDocument48 pagesData Structures Using Java - Lab Manualkishore kumar80% (5)
- TBC ResourcesDocument49 pagesTBC Resourcesyuri Paul Castañeda BaldaNo ratings yet