
mrt5 1
mrt5 1
You might also like
- MRTduino English VersionDocument95 pagesMRTduino English VersionMaria Isabel Espinoza SalvadorNo ratings yet
- Wsm-Park EN 2000-2007Document187 pagesWsm-Park EN 2000-2007Andrzej Nurzyński100% (1)
- Overspeed Govenor: Operating ManualDocument48 pagesOverspeed Govenor: Operating Manualhc_elec100% (1)
- SainSmart Genmitsu CNC Router 3018-User ManualDocument26 pagesSainSmart Genmitsu CNC Router 3018-User ManualFernando MarcanoNo ratings yet
- EN. mrt3-3 PDFDocument126 pagesEN. mrt3-3 PDFemrecan cincanNo ratings yet
- Somfy Motor Catalog LightDocument78 pagesSomfy Motor Catalog LightAmer GrabusNo ratings yet
- 2.0L Gasoline Engine With Start/Stop, CADA, CAEB, CDNB, CDNC: Wiring DiagramDocument24 pages2.0L Gasoline Engine With Start/Stop, CADA, CAEB, CDNB, CDNC: Wiring DiagramJose FlorezNo ratings yet
- ZACE 7K-E Engine EWD of Zace DR077W (VN)Document41 pagesZACE 7K-E Engine EWD of Zace DR077W (VN)nguyenthai100% (1)
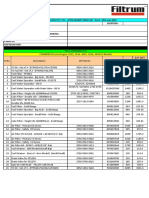
- Location:-Fleetguard Filters Pvt. Ltd. - After Market Price List W.E.F. 18Th June 2018 Distributor Name: - Address: - Office Contact No. For Queries / Order Booking: - Distributor Contact PersonDocument23 pagesLocation:-Fleetguard Filters Pvt. Ltd. - After Market Price List W.E.F. 18Th June 2018 Distributor Name: - Address: - Office Contact No. For Queries / Order Booking: - Distributor Contact PersonDadasaheb More100% (2)
- mrt5 1Document120 pagesmrt5 1June Emerson ManalangNo ratings yet
- MRTduino English VersionDocument95 pagesMRTduino English Versionredharry27No ratings yet
- Honda CB500X Oem Installation Crash BarDocument4 pagesHonda CB500X Oem Installation Crash BarUrialNo ratings yet
- Operators Manual: Artificial LiftDocument25 pagesOperators Manual: Artificial LiftSam Ruge100% (1)
- Katalog Suku Cadang Mio J - 231102 - 121521Document61 pagesKatalog Suku Cadang Mio J - 231102 - 121521drive1 ardhyNo ratings yet
- Meritor - FrontAxle KinpinesDocument234 pagesMeritor - FrontAxle Kinpinesramsi17No ratings yet
- Cardan Driveline Catalogue Series GLOBALDocument285 pagesCardan Driveline Catalogue Series GLOBALlujoflosaNo ratings yet
- Universal StuffDocument8 pagesUniversal Stuffjaume68No ratings yet
- MRTX 1Document108 pagesMRTX 1Thet Aung SanNo ratings yet
- Manual - AR2 Robot Arm Assembly PDFDocument70 pagesManual - AR2 Robot Arm Assembly PDFZall Boed-zilsNo ratings yet
- Rotork CatalogDocument12 pagesRotork CatalogKedar PatwardhanNo ratings yet
- Manual - AR2 Robot Arm AssemblyDocument67 pagesManual - AR2 Robot Arm AssemblyMohammad NasutionNo ratings yet
- Platinum TX Series: Electric Counterbalanced Forklift TrucksDocument6 pagesPlatinum TX Series: Electric Counterbalanced Forklift TrucksJose Juan Reyes ResendizNo ratings yet
- Imh 23Document7 pagesImh 23Lorenzo TorresNo ratings yet
- Motor Da FatBikeDocument1 pageMotor Da FatBikeAllan BispoNo ratings yet
- Ficha Tecnica Pf50Document10 pagesFicha Tecnica Pf50GUSTAVO CORTEZNo ratings yet
- ENG.001 Mechanical EngineDocument44 pagesENG.001 Mechanical EngineOmar Diaz Segura100% (1)
- Echnical Information: Oncept and Main ApplicationsDocument15 pagesEchnical Information: Oncept and Main ApplicationsJózek JózekNo ratings yet
- 1setting Sepam 1000Document19 pages1setting Sepam 1000Wildan ArifNo ratings yet
- UniCarriers TX BrochureDocument6 pagesUniCarriers TX BrochureAbdelhadi HoussinNo ratings yet
- ULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionDocument21 pagesULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionHABUMUGISHA DieudonneNo ratings yet
- ULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionDocument21 pagesULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionVictor Manuel ReyesNo ratings yet
- ULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionDocument21 pagesULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionCapitanSalamiNo ratings yet
- Genmitsu - 4030XLPROVer MANUALv1.01Document39 pagesGenmitsu - 4030XLPROVer MANUALv1.01abunom48No ratings yet
- Model 40D MT Triple Mast: Parts ManualDocument108 pagesModel 40D MT Triple Mast: Parts ManualChristian BedoyaNo ratings yet
- SN 74 HC 595Document36 pagesSN 74 HC 595inven formNo ratings yet
- Snx4Hc595 8-Bit Shift Registers With 3-State Output RegistersDocument36 pagesSnx4Hc595 8-Bit Shift Registers With 3-State Output RegistersAldair Yhan GonzalesNo ratings yet
- Snx4Hc595 8-Bit Shift Registers With 3-State Output RegistersDocument38 pagesSnx4Hc595 8-Bit Shift Registers With 3-State Output RegistersĐăng VinhNo ratings yet
- Snx4Hc595 8-Bit Shift Registers With 3-State Output RegistersDocument39 pagesSnx4Hc595 8-Bit Shift Registers With 3-State Output RegistersDiego LondoñoNo ratings yet
- ENG0011 DB DE Mechanical EngineDocument44 pagesENG0011 DB DE Mechanical Enginefrezgi birhanuNo ratings yet
- Service Information: AG-AC90P/PX/PJ/AN/EJ/EN/MCDocument40 pagesService Information: AG-AC90P/PX/PJ/AN/EJ/EN/MCEdward CapmariNo ratings yet
- IB-303 - NS 200 NS-Fi RS200 - Modification of Cylinder Head AsslyDocument4 pagesIB-303 - NS 200 NS-Fi RS200 - Modification of Cylinder Head AsslyDeibid RVNo ratings yet
- Combiflex, Combiflex RL, Re 500 e 316 (En) PDFDocument16 pagesCombiflex, Combiflex RL, Re 500 e 316 (En) PDFleonardoNo ratings yet
- Alternator: SpecificationsDocument4 pagesAlternator: SpecificationsjogremaurNo ratings yet
- Supplementary Service Manual: For '03 ModelDocument20 pagesSupplementary Service Manual: For '03 Modeljose martinezNo ratings yet
- M1. Multi Axis Servo System Using Step Motors and Motion Control PDFDocument37 pagesM1. Multi Axis Servo System Using Step Motors and Motion Control PDFTrân HồNo ratings yet
- fc5200 SpecificationsDocument12 pagesfc5200 SpecificationsHakan ŞahinoğluNo ratings yet
- Esquema Hidraulico MT - X 1030 S Turbo s4 E3, GetdocDocument6 pagesEsquema Hidraulico MT - X 1030 S Turbo s4 E3, GetdocEliecer godoy100% (1)
- Grundfos InstructionDocument22 pagesGrundfos InstructionSajeev NerurkarNo ratings yet
- RAUP THA Commercial R22, R407C 250-6000 MBH 50, 60 HZ Product CatalogueDocument68 pagesRAUP THA Commercial R22, R407C 250-6000 MBH 50, 60 HZ Product CatalogueHassan SaleemNo ratings yet
- Specifications For CamshaftsDocument78 pagesSpecifications For Camshaftsbetoven84370% (1)
- Starter Sprinter 1500 2019Document9 pagesStarter Sprinter 1500 2019OHANo ratings yet
- TinyTrak4 Hardware Manual v0.6Document9 pagesTinyTrak4 Hardware Manual v0.6Scott Gillis100% (1)
- Manual - AR2 Robot Arm AssemblyDocument68 pagesManual - AR2 Robot Arm AssemblyDreyer1416100% (1)
- wlt600 2enDocument26 pageswlt600 2enAldo BravoNo ratings yet
- 6932FD TeDocument6 pages6932FD TeWalker SkyNo ratings yet
- Swaraj Tractor Genuine SparesDocument139 pagesSwaraj Tractor Genuine SparesKanhaiya AgrawalNo ratings yet
- 9300 SERIES: Parts ManualDocument28 pages9300 SERIES: Parts ManualRazvan MitruNo ratings yet
- 'RAUP IOM-Aug06Document35 pages'RAUP IOM-Aug06Ngô Khắc ToảnNo ratings yet
- Specifications For Crankshafts in C7, C9, C-9, C10, C11, C12, C-12, C13, C-13, C15, C-15, C16, C-16, C18, C-18, C27, C30, and C32 Engines (1202)Document18 pagesSpecifications For Crankshafts in C7, C9, C-9, C10, C11, C12, C-12, C13, C-13, C15, C-15, C16, C-16, C18, C-18, C27, C30, and C32 Engines (1202)Eduar VasqNo ratings yet
- Mercruiser-3 7LDocument83 pagesMercruiser-3 7LFreakplayer20000No ratings yet
- Rock Drilling BitsDocument80 pagesRock Drilling BitsshrekerNo ratings yet
- Illustrated Assembly Manual k8040 Rev2Document24 pagesIllustrated Assembly Manual k8040 Rev2sankar ramasavarNo ratings yet
- 735fe, 735xm, 834xm CatlougeDocument143 pages735fe, 735xm, 834xm Catlougedadu tractor83% (30)
- EH3500AC 3 - Workshop - WQEB EN 01 (20151120) 153 164Document12 pagesEH3500AC 3 - Workshop - WQEB EN 01 (20151120) 153 164Omar HajjiNo ratings yet
- Volvo Ew 160BDocument60 pagesVolvo Ew 160BApexiNo ratings yet
- Installation Instructions: RingsDocument3 pagesInstallation Instructions: RingsMulualem TeferaNo ratings yet
- Hydraulic Pumps - Hydraulic Pump TypesDocument28 pagesHydraulic Pumps - Hydraulic Pump TypesMohammed Al-OdatNo ratings yet
- Electronica y Electricidad Automotriz 4 Como Funcionan Los Sistemas de Encendido ElectronicoDocument11 pagesElectronica y Electricidad Automotriz 4 Como Funcionan Los Sistemas de Encendido ElectronicoJuan Francisco Garcia ArroyoNo ratings yet
- Turb AireCentrifugal PDFDocument2 pagesTurb AireCentrifugal PDFBoBo KyawNo ratings yet
- Ficha Tecnica - Tabla de Carga Sany 100Document21 pagesFicha Tecnica - Tabla de Carga Sany 100Adm Rigger Crane Sac100% (1)
- HENCODocument144 pagesHENCOlucy_erNo ratings yet
- Electrical Drives Course HandoutDocument2 pagesElectrical Drives Course Handoutramkashyap117No ratings yet
- Chapter 2 Automotive Careers Ase Certification PDFDocument12 pagesChapter 2 Automotive Careers Ase Certification PDFAmirNo ratings yet
- Husqvarna 137 PDFDocument6 pagesHusqvarna 137 PDFDamir MiholićNo ratings yet
- Triton Workcentre 2000Document28 pagesTriton Workcentre 2000MiraNo ratings yet
- Manual de Operacion y Servicio VC6-FT & VC7-FTDocument19 pagesManual de Operacion y Servicio VC6-FT & VC7-FTsoluciones Internet 4taNo ratings yet
- XL CodesDocument3 pagesXL CodesAntonioPalloneNo ratings yet
- Switch RotatoriosDocument12 pagesSwitch RotatoriosRoberto AndrésNo ratings yet
- Ejes CompensadoresDocument3 pagesEjes CompensadoresNovers Ma RresNo ratings yet
- CDPF System PDFDocument16 pagesCDPF System PDFmanualNo ratings yet
- Engine Oil System ................................Document10 pagesEngine Oil System ................................chiri003No ratings yet
- ENERGY STAR Most Efficient 2020 - Central Air Conditioners and Air Source Heat Pumps - Products - ENERGY STARDocument51 pagesENERGY STAR Most Efficient 2020 - Central Air Conditioners and Air Source Heat Pumps - Products - ENERGY STARRicardo Chegwin HillembrandNo ratings yet
- Electrical Supercharging For Future Diesel Powertrain ApplicationsDocument10 pagesElectrical Supercharging For Future Diesel Powertrain ApplicationsAbdoel Wahied ArohmanNo ratings yet
- Calydra-Comfort Spare PartsDocument16 pagesCalydra-Comfort Spare PartsnitescucipNo ratings yet
- Dja3032 Chapter3 151217030704Document38 pagesDja3032 Chapter3 151217030704handwiNo ratings yet
- SPMT SCHEDULE AS OF 19062020 (Version 1)Document31 pagesSPMT SCHEDULE AS OF 19062020 (Version 1)asdasd asdasdNo ratings yet
- Aeg Lavamat 511Document21 pagesAeg Lavamat 511POLAKU2002No ratings yet
- CNC Lathe Machines PDFDocument7 pagesCNC Lathe Machines PDFMetwally Naser100% (1)
- Setting Up Hydraulic/pneumatic Clutch ActuatorDocument5 pagesSetting Up Hydraulic/pneumatic Clutch ActuatorCristian RoşianuNo ratings yet
























































































Download as pdf or txt
You might also like
- MRTduino English VersionDocument95 pagesMRTduino English VersionMaria Isabel Espinoza SalvadorNo ratings yet
- Wsm-Park EN 2000-2007Document187 pagesWsm-Park EN 2000-2007Andrzej Nurzyński100% (1)
- Overspeed Govenor: Operating ManualDocument48 pagesOverspeed Govenor: Operating Manualhc_elec100% (1)
- SainSmart Genmitsu CNC Router 3018-User ManualDocument26 pagesSainSmart Genmitsu CNC Router 3018-User ManualFernando MarcanoNo ratings yet
- EN. mrt3-3 PDFDocument126 pagesEN. mrt3-3 PDFemrecan cincanNo ratings yet
- Somfy Motor Catalog LightDocument78 pagesSomfy Motor Catalog LightAmer GrabusNo ratings yet
- 2.0L Gasoline Engine With Start/Stop, CADA, CAEB, CDNB, CDNC: Wiring DiagramDocument24 pages2.0L Gasoline Engine With Start/Stop, CADA, CAEB, CDNB, CDNC: Wiring DiagramJose FlorezNo ratings yet
- ZACE 7K-E Engine EWD of Zace DR077W (VN)Document41 pagesZACE 7K-E Engine EWD of Zace DR077W (VN)nguyenthai100% (1)
- Location:-Fleetguard Filters Pvt. Ltd. - After Market Price List W.E.F. 18Th June 2018 Distributor Name: - Address: - Office Contact No. For Queries / Order Booking: - Distributor Contact PersonDocument23 pagesLocation:-Fleetguard Filters Pvt. Ltd. - After Market Price List W.E.F. 18Th June 2018 Distributor Name: - Address: - Office Contact No. For Queries / Order Booking: - Distributor Contact PersonDadasaheb More100% (2)
- mrt5 1Document120 pagesmrt5 1June Emerson ManalangNo ratings yet
- MRTduino English VersionDocument95 pagesMRTduino English Versionredharry27No ratings yet
- Honda CB500X Oem Installation Crash BarDocument4 pagesHonda CB500X Oem Installation Crash BarUrialNo ratings yet
- Operators Manual: Artificial LiftDocument25 pagesOperators Manual: Artificial LiftSam Ruge100% (1)
- Katalog Suku Cadang Mio J - 231102 - 121521Document61 pagesKatalog Suku Cadang Mio J - 231102 - 121521drive1 ardhyNo ratings yet
- Meritor - FrontAxle KinpinesDocument234 pagesMeritor - FrontAxle Kinpinesramsi17No ratings yet
- Cardan Driveline Catalogue Series GLOBALDocument285 pagesCardan Driveline Catalogue Series GLOBALlujoflosaNo ratings yet
- Universal StuffDocument8 pagesUniversal Stuffjaume68No ratings yet
- MRTX 1Document108 pagesMRTX 1Thet Aung SanNo ratings yet
- Manual - AR2 Robot Arm Assembly PDFDocument70 pagesManual - AR2 Robot Arm Assembly PDFZall Boed-zilsNo ratings yet
- Rotork CatalogDocument12 pagesRotork CatalogKedar PatwardhanNo ratings yet
- Manual - AR2 Robot Arm AssemblyDocument67 pagesManual - AR2 Robot Arm AssemblyMohammad NasutionNo ratings yet
- Platinum TX Series: Electric Counterbalanced Forklift TrucksDocument6 pagesPlatinum TX Series: Electric Counterbalanced Forklift TrucksJose Juan Reyes ResendizNo ratings yet
- Imh 23Document7 pagesImh 23Lorenzo TorresNo ratings yet
- Motor Da FatBikeDocument1 pageMotor Da FatBikeAllan BispoNo ratings yet
- Ficha Tecnica Pf50Document10 pagesFicha Tecnica Pf50GUSTAVO CORTEZNo ratings yet
- ENG.001 Mechanical EngineDocument44 pagesENG.001 Mechanical EngineOmar Diaz Segura100% (1)
- Echnical Information: Oncept and Main ApplicationsDocument15 pagesEchnical Information: Oncept and Main ApplicationsJózek JózekNo ratings yet
- 1setting Sepam 1000Document19 pages1setting Sepam 1000Wildan ArifNo ratings yet
- UniCarriers TX BrochureDocument6 pagesUniCarriers TX BrochureAbdelhadi HoussinNo ratings yet
- ULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionDocument21 pagesULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionHABUMUGISHA DieudonneNo ratings yet
- ULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionDocument21 pagesULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionVictor Manuel ReyesNo ratings yet
- ULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionDocument21 pagesULN2803A Darlington Transistor Arrays: 1 Features 3 DescriptionCapitanSalamiNo ratings yet
- Genmitsu - 4030XLPROVer MANUALv1.01Document39 pagesGenmitsu - 4030XLPROVer MANUALv1.01abunom48No ratings yet
- Model 40D MT Triple Mast: Parts ManualDocument108 pagesModel 40D MT Triple Mast: Parts ManualChristian BedoyaNo ratings yet
- SN 74 HC 595Document36 pagesSN 74 HC 595inven formNo ratings yet
- Snx4Hc595 8-Bit Shift Registers With 3-State Output RegistersDocument36 pagesSnx4Hc595 8-Bit Shift Registers With 3-State Output RegistersAldair Yhan GonzalesNo ratings yet
- Snx4Hc595 8-Bit Shift Registers With 3-State Output RegistersDocument38 pagesSnx4Hc595 8-Bit Shift Registers With 3-State Output RegistersĐăng VinhNo ratings yet
- Snx4Hc595 8-Bit Shift Registers With 3-State Output RegistersDocument39 pagesSnx4Hc595 8-Bit Shift Registers With 3-State Output RegistersDiego LondoñoNo ratings yet
- ENG0011 DB DE Mechanical EngineDocument44 pagesENG0011 DB DE Mechanical Enginefrezgi birhanuNo ratings yet
- Service Information: AG-AC90P/PX/PJ/AN/EJ/EN/MCDocument40 pagesService Information: AG-AC90P/PX/PJ/AN/EJ/EN/MCEdward CapmariNo ratings yet
- IB-303 - NS 200 NS-Fi RS200 - Modification of Cylinder Head AsslyDocument4 pagesIB-303 - NS 200 NS-Fi RS200 - Modification of Cylinder Head AsslyDeibid RVNo ratings yet
- Combiflex, Combiflex RL, Re 500 e 316 (En) PDFDocument16 pagesCombiflex, Combiflex RL, Re 500 e 316 (En) PDFleonardoNo ratings yet
- Alternator: SpecificationsDocument4 pagesAlternator: SpecificationsjogremaurNo ratings yet
- Supplementary Service Manual: For '03 ModelDocument20 pagesSupplementary Service Manual: For '03 Modeljose martinezNo ratings yet
- M1. Multi Axis Servo System Using Step Motors and Motion Control PDFDocument37 pagesM1. Multi Axis Servo System Using Step Motors and Motion Control PDFTrân HồNo ratings yet
- fc5200 SpecificationsDocument12 pagesfc5200 SpecificationsHakan ŞahinoğluNo ratings yet
- Esquema Hidraulico MT - X 1030 S Turbo s4 E3, GetdocDocument6 pagesEsquema Hidraulico MT - X 1030 S Turbo s4 E3, GetdocEliecer godoy100% (1)
- Grundfos InstructionDocument22 pagesGrundfos InstructionSajeev NerurkarNo ratings yet
- RAUP THA Commercial R22, R407C 250-6000 MBH 50, 60 HZ Product CatalogueDocument68 pagesRAUP THA Commercial R22, R407C 250-6000 MBH 50, 60 HZ Product CatalogueHassan SaleemNo ratings yet
- Specifications For CamshaftsDocument78 pagesSpecifications For Camshaftsbetoven84370% (1)
- Starter Sprinter 1500 2019Document9 pagesStarter Sprinter 1500 2019OHANo ratings yet
- TinyTrak4 Hardware Manual v0.6Document9 pagesTinyTrak4 Hardware Manual v0.6Scott Gillis100% (1)
- Manual - AR2 Robot Arm AssemblyDocument68 pagesManual - AR2 Robot Arm AssemblyDreyer1416100% (1)
- wlt600 2enDocument26 pageswlt600 2enAldo BravoNo ratings yet
- 6932FD TeDocument6 pages6932FD TeWalker SkyNo ratings yet
- Swaraj Tractor Genuine SparesDocument139 pagesSwaraj Tractor Genuine SparesKanhaiya AgrawalNo ratings yet
- 9300 SERIES: Parts ManualDocument28 pages9300 SERIES: Parts ManualRazvan MitruNo ratings yet
- 'RAUP IOM-Aug06Document35 pages'RAUP IOM-Aug06Ngô Khắc ToảnNo ratings yet
- Specifications For Crankshafts in C7, C9, C-9, C10, C11, C12, C-12, C13, C-13, C15, C-15, C16, C-16, C18, C-18, C27, C30, and C32 Engines (1202)Document18 pagesSpecifications For Crankshafts in C7, C9, C-9, C10, C11, C12, C-12, C13, C-13, C15, C-15, C16, C-16, C18, C-18, C27, C30, and C32 Engines (1202)Eduar VasqNo ratings yet
- Mercruiser-3 7LDocument83 pagesMercruiser-3 7LFreakplayer20000No ratings yet
- Rock Drilling BitsDocument80 pagesRock Drilling BitsshrekerNo ratings yet
- Illustrated Assembly Manual k8040 Rev2Document24 pagesIllustrated Assembly Manual k8040 Rev2sankar ramasavarNo ratings yet
- 735fe, 735xm, 834xm CatlougeDocument143 pages735fe, 735xm, 834xm Catlougedadu tractor83% (30)
- EH3500AC 3 - Workshop - WQEB EN 01 (20151120) 153 164Document12 pagesEH3500AC 3 - Workshop - WQEB EN 01 (20151120) 153 164Omar HajjiNo ratings yet
- Volvo Ew 160BDocument60 pagesVolvo Ew 160BApexiNo ratings yet
- Installation Instructions: RingsDocument3 pagesInstallation Instructions: RingsMulualem TeferaNo ratings yet
- Hydraulic Pumps - Hydraulic Pump TypesDocument28 pagesHydraulic Pumps - Hydraulic Pump TypesMohammed Al-OdatNo ratings yet
- Electronica y Electricidad Automotriz 4 Como Funcionan Los Sistemas de Encendido ElectronicoDocument11 pagesElectronica y Electricidad Automotriz 4 Como Funcionan Los Sistemas de Encendido ElectronicoJuan Francisco Garcia ArroyoNo ratings yet
- Turb AireCentrifugal PDFDocument2 pagesTurb AireCentrifugal PDFBoBo KyawNo ratings yet
- Ficha Tecnica - Tabla de Carga Sany 100Document21 pagesFicha Tecnica - Tabla de Carga Sany 100Adm Rigger Crane Sac100% (1)
- HENCODocument144 pagesHENCOlucy_erNo ratings yet
- Electrical Drives Course HandoutDocument2 pagesElectrical Drives Course Handoutramkashyap117No ratings yet
- Chapter 2 Automotive Careers Ase Certification PDFDocument12 pagesChapter 2 Automotive Careers Ase Certification PDFAmirNo ratings yet
- Husqvarna 137 PDFDocument6 pagesHusqvarna 137 PDFDamir MiholićNo ratings yet
- Triton Workcentre 2000Document28 pagesTriton Workcentre 2000MiraNo ratings yet
- Manual de Operacion y Servicio VC6-FT & VC7-FTDocument19 pagesManual de Operacion y Servicio VC6-FT & VC7-FTsoluciones Internet 4taNo ratings yet
- XL CodesDocument3 pagesXL CodesAntonioPalloneNo ratings yet
- Switch RotatoriosDocument12 pagesSwitch RotatoriosRoberto AndrésNo ratings yet
- Ejes CompensadoresDocument3 pagesEjes CompensadoresNovers Ma RresNo ratings yet
- CDPF System PDFDocument16 pagesCDPF System PDFmanualNo ratings yet
- Engine Oil System ................................Document10 pagesEngine Oil System ................................chiri003No ratings yet
- ENERGY STAR Most Efficient 2020 - Central Air Conditioners and Air Source Heat Pumps - Products - ENERGY STARDocument51 pagesENERGY STAR Most Efficient 2020 - Central Air Conditioners and Air Source Heat Pumps - Products - ENERGY STARRicardo Chegwin HillembrandNo ratings yet
- Electrical Supercharging For Future Diesel Powertrain ApplicationsDocument10 pagesElectrical Supercharging For Future Diesel Powertrain ApplicationsAbdoel Wahied ArohmanNo ratings yet
- Calydra-Comfort Spare PartsDocument16 pagesCalydra-Comfort Spare PartsnitescucipNo ratings yet
- Dja3032 Chapter3 151217030704Document38 pagesDja3032 Chapter3 151217030704handwiNo ratings yet
- SPMT SCHEDULE AS OF 19062020 (Version 1)Document31 pagesSPMT SCHEDULE AS OF 19062020 (Version 1)asdasd asdasdNo ratings yet
- Aeg Lavamat 511Document21 pagesAeg Lavamat 511POLAKU2002No ratings yet
- CNC Lathe Machines PDFDocument7 pagesCNC Lathe Machines PDFMetwally Naser100% (1)
- Setting Up Hydraulic/pneumatic Clutch ActuatorDocument5 pagesSetting Up Hydraulic/pneumatic Clutch ActuatorCristian RoşianuNo ratings yet