
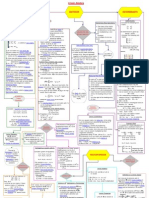
Manipulating The Multivariate Gaussian Density
Manipulating The Multivariate Gaussian Density
You might also like
- Hassler Whitney - Tensor Products of Abelian GroupsDocument34 pagesHassler Whitney - Tensor Products of Abelian GroupsRagib ZamanNo ratings yet
- Linear Algebra Flow Diagram 1Document1 pageLinear Algebra Flow Diagram 1stansmith1100% (1)
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- Linear Algebra With Applications 2nd Edition by Holt Test BankDocument13 pagesLinear Algebra With Applications 2nd Edition by Holt Test BankvalgorbNo ratings yet
- Advanced Linear Algebra PDFDocument348 pagesAdvanced Linear Algebra PDFaviantara100% (10)
- cs229 Notes9 PDFDocument9 pagescs229 Notes9 PDFShubhamKhodiyarNo ratings yet
- Gaussian Conjugate Prior Cheat SheetDocument7 pagesGaussian Conjugate Prior Cheat SheetHirdesh KumarNo ratings yet
- Mathematical Methods MT2017: Problems 2: John - Magorrian@physics - Ox.ac - UkDocument2 pagesMathematical Methods MT2017: Problems 2: John - Magorrian@physics - Ox.ac - UkRoy VeseyNo ratings yet
- Chap2 Multivariate Normal and Related DistributionsDocument18 pagesChap2 Multivariate Normal and Related DistributionschanpeinNo ratings yet
- The Multivariate Gaussian Distribution: 1 Relationship To Univariate GaussiansDocument10 pagesThe Multivariate Gaussian Distribution: 1 Relationship To Univariate Gaussiansandrewjbrereton31No ratings yet
- Pauli Matrices: 1 Algebraic PropertiesDocument6 pagesPauli Matrices: 1 Algebraic PropertiesAnthony RogersNo ratings yet
- Multivariate AnalysisDocument25 pagesMultivariate AnalysisPaul EthamNo ratings yet
- Solv Int9712008Document6 pagesSolv Int9712008Lucas SilvaNo ratings yet
- A Relativistic Statistical Field Theory On A Discretized Minkowski Lattice With Quantum-Like ObservablesDocument21 pagesA Relativistic Statistical Field Theory On A Discretized Minkowski Lattice With Quantum-Like ObservablesBNo ratings yet
- HW1 SolutionsDocument3 pagesHW1 SolutionsyanxiaNo ratings yet
- A Pseudospectral Method For The One Dimensional Fractional Laplacian On RDocument31 pagesA Pseudospectral Method For The One Dimensional Fractional Laplacian On RRocher FerreroNo ratings yet
- Cumulative Function N Dimensional Gaussians 12.2013Document8 pagesCumulative Function N Dimensional Gaussians 12.2013msayalaNo ratings yet
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocument5 pagesCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiNo ratings yet
- Gaussian Mixture Model: P (X - Y) P (Y - X) P (X)Document3 pagesGaussian Mixture Model: P (X - Y) P (Y - X) P (X)Kishore Kumar DasNo ratings yet
- f (x) = Γ (α+β) Γ (α) Γ (β) x, for 0<x<1Document8 pagesf (x) = Γ (α+β) Γ (α) Γ (β) x, for 0<x<1Kimondo KingNo ratings yet
- The Pointwise Convergence of Möbius Maps: A.F.BeardonDocument7 pagesThe Pointwise Convergence of Möbius Maps: A.F.BeardonAnalysis JohnNo ratings yet
- A Spectral Approach To BandwidthDocument19 pagesA Spectral Approach To Bandwidthforoud_makvandi1985No ratings yet
- 10of15 - Appendix A - Mathematical BackgroundDocument8 pages10of15 - Appendix A - Mathematical BackgroundBranko NikolicNo ratings yet
- Gaussian Mixture Models: Abstract in This Chapter We First Introduce The Basic Concepts of Random VariablesDocument10 pagesGaussian Mixture Models: Abstract in This Chapter We First Introduce The Basic Concepts of Random VariablesDoddi HarishNo ratings yet
- SJC KatzDocument15 pagesSJC KatzChrisnaud DambaNo ratings yet
- The New Method: Inimum Iquid LowratesDocument9 pagesThe New Method: Inimum Iquid LowrateschristinaNo ratings yet
- Chap 2Document9 pagesChap 2MingdreamerNo ratings yet
- Research On CDRDocument24 pagesResearch On CDRCreating companyNo ratings yet
- TMA4165 Differential Equations and Dynamical Systems Spring 2018Document2 pagesTMA4165 Differential Equations and Dynamical Systems Spring 2018salimNo ratings yet
- MECOM093Document17 pagesMECOM093Jose RissoNo ratings yet
- Linear Project 1Document13 pagesLinear Project 1Megan WheelerNo ratings yet
- Remezr2 ArxivDocument30 pagesRemezr2 ArxivFlorinNo ratings yet
- FornbergDocument9 pagesFornbergSomya kumar SinghNo ratings yet
- PruebaDocument17 pagesPruebasocorroNo ratings yet
- 2 Gaussian Process PDFDocument55 pages2 Gaussian Process PDFนนฐ์ทกร บุญรักชาติNo ratings yet
- GTR2019 1Document67 pagesGTR2019 1Bhat SaqibNo ratings yet
- MCMC Bayes PDFDocument27 pagesMCMC Bayes PDFMichael TadesseNo ratings yet
- Panion PDFDocument154 pagesPanion PDFAna MariaNo ratings yet
- Adaptive MCMC For EveryoneDocument13 pagesAdaptive MCMC For EveryoneWu PkNo ratings yet
- General Principles of Brane Kinematics and DynamicsDocument12 pagesGeneral Principles of Brane Kinematics and DynamicsOliver BardinNo ratings yet
- Perspectiva Estadística de La Homología Persistente.Document26 pagesPerspectiva Estadística de La Homología Persistente.ernesto tamporaNo ratings yet
- ch1 ProbsDocument8 pagesch1 ProbsEkrem GüldesteNo ratings yet
- The Multivariate Normal Distribution: Exactly Central LimitDocument59 pagesThe Multivariate Normal Distribution: Exactly Central LimitVictor ChenNo ratings yet
- 2.4 Confidence Intervals and Prediction Intervals in Linear ModelsDocument7 pages2.4 Confidence Intervals and Prediction Intervals in Linear Modelsyusra fayyazNo ratings yet
- Introduction To MRFsDocument6 pagesIntroduction To MRFsHoward DickersonNo ratings yet
- NummaxDocument3 pagesNummaxadityowahyusaputroNo ratings yet
- An Algorithm For Choosing Best Shape Parameter ForDocument11 pagesAn Algorithm For Choosing Best Shape Parameter ForKhadija M.No ratings yet
- Lecture 24: Weighted and Generalized Least Squares 1 Weighted Least SquaresDocument8 pagesLecture 24: Weighted and Generalized Least Squares 1 Weighted Least SquaresSNo ratings yet
- 2.5.2 Multivariate DensityDocument12 pages2.5.2 Multivariate DensitymiltonsarriaNo ratings yet
- Excited States Induced Inhomogeneous SolutionDocument6 pagesExcited States Induced Inhomogeneous SolutionQ. XiangNo ratings yet
- Lecture 5Document6 pagesLecture 5aronl10No ratings yet
- Nb-Fuzzy Metric Spaces With Topological Properties and ApplicationsDocument20 pagesNb-Fuzzy Metric Spaces With Topological Properties and ApplicationsGALLEGO LUPIANEZNo ratings yet
- Exercises - Digital CommunicationsDocument34 pagesExercises - Digital CommunicationsMiguel FuentesNo ratings yet
- Euclidean Quantum Field Theory From Variational DynamicsDocument12 pagesEuclidean Quantum Field Theory From Variational DynamicsBNo ratings yet
- Theta LogDocument29 pagesTheta LogTom CruiseNo ratings yet
- Frank - Klinker@math - Tu-Dortmund - de DOI 10.1007/s00591-010-0080-8Document11 pagesFrank - Klinker@math - Tu-Dortmund - de DOI 10.1007/s00591-010-0080-8Tarkeshwar MahatoNo ratings yet
- Lecture Notes On The Gaussian DistributionDocument6 pagesLecture Notes On The Gaussian DistributionMayukh MaitraNo ratings yet
- CS 717: EndsemDocument5 pagesCS 717: EndsemGanesh RamakrishnanNo ratings yet
- Streaming Linear RegressionDocument9 pagesStreaming Linear RegressionOri CarmiNo ratings yet
- Antenna Factorization of Gauge-Theory AmplitudesDocument13 pagesAntenna Factorization of Gauge-Theory AmplitudesfarhadNo ratings yet
- Holography and CFT On Generic ManifoldsDocument9 pagesHolography and CFT On Generic ManifoldsGary JohnsonNo ratings yet
- Schoner TDocument12 pagesSchoner TEpic WinNo ratings yet
- Least Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Document12 pagesLeast Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Anonymous J1scGXwkKDNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Printf - C++ ReferenceDocument3 pagesPrintf - C++ ReferenceSergiomaguuNo ratings yet
- A Beginners Guide To Dual-QuaternionsDocument10 pagesA Beginners Guide To Dual-QuaternionsSergiomaguuNo ratings yet
- Bluetooth Support For NXTDocument5 pagesBluetooth Support For NXTSergiomaguuNo ratings yet
- Codigo Trimer 800Document1 pageCodigo Trimer 800SergiomaguuNo ratings yet
- Matrix and Determinants NotesDocument7 pagesMatrix and Determinants NotesYash TiwariNo ratings yet
- Semi-Symmetric - Spaces: M G R R R X Y M R R P M R PDocument9 pagesSemi-Symmetric - Spaces: M G R R R X Y M R R P M R PharadhanNo ratings yet
- Lec 10Document36 pagesLec 10vidhya dsNo ratings yet
- Reflective SummaryDocument2 pagesReflective SummaryIsha ChandNo ratings yet
- Nonlinear Systems: Lyapunov Stability Theory - Part 2Document36 pagesNonlinear Systems: Lyapunov Stability Theory - Part 2giacomoNo ratings yet
- Vectors, Tensors, Indices and All That - .Document7 pagesVectors, Tensors, Indices and All That - .Aayush RajputNo ratings yet
- Introduction To Dynamic Systems: Theory, Models, and Applications - David G. LuenbergerDocument3 pagesIntroduction To Dynamic Systems: Theory, Models, and Applications - David G. LuenbergerJade FrostNo ratings yet
- Sylvester Criterion For Positive DefinitenessDocument4 pagesSylvester Criterion For Positive DefinitenessArlette100% (1)
- Linear Functional AnalysisDocument9 pagesLinear Functional AnalysisΣωτήρης ΝτελήςNo ratings yet
- HW Study Packet - 1.3 Vectors and ScalarsDocument4 pagesHW Study Packet - 1.3 Vectors and ScalarsMayur VanjaniNo ratings yet
- Math Formula All Collection PDFDocument75 pagesMath Formula All Collection PDFEr S Karthick AnnamalaiNo ratings yet
- Filename: December 2014 Question & Solution PDFDocument23 pagesFilename: December 2014 Question & Solution PDFVishak H PillaiNo ratings yet
- Tutorial 1: Universiti Tunku Abdul RahmanDocument4 pagesTutorial 1: Universiti Tunku Abdul RahmanfreeloadNo ratings yet
- Solvability, Controllability, and Observability of Singular SystemsDocument20 pagesSolvability, Controllability, and Observability of Singular SystemsjavbejaranoNo ratings yet
- Further Maths 3 Revision Notes Feb 2016Document56 pagesFurther Maths 3 Revision Notes Feb 2016ayomideadare13No ratings yet
- Tutorial11 SolutionDocument2 pagesTutorial11 Solutionveena panini100% (1)
- Arkadiusz Jadczyk - Conformally Compactified Minkowski Space Myths and FactsDocument10 pagesArkadiusz Jadczyk - Conformally Compactified Minkowski Space Myths and FactsarkajadNo ratings yet
- Inverse Trigonometry Practice Sheet (FRB)Document15 pagesInverse Trigonometry Practice Sheet (FRB)abidrhymeNo ratings yet
- Jomms 08Document20 pagesJomms 08ebrahimpanNo ratings yet
- 3D Plane Stresses and Strains - QProducersDocument14 pages3D Plane Stresses and Strains - QProducersvickywce JadhavNo ratings yet
- Conference MatrixDocument5 pagesConference MatrixEleonor CamargoNo ratings yet
- Notes On Quantum Mechanics PDFDocument226 pagesNotes On Quantum Mechanics PDFhhjder_bag8995No ratings yet
- Obj Selected QsDocument31 pagesObj Selected Qsjyotisahni13No ratings yet
- Shifrin ErrataDocument3 pagesShifrin ErrataMainak SamantaNo ratings yet
- Part 02 Question (9-20)Document14 pagesPart 02 Question (9-20)Mahendra Panda0% (1)
- Matrices DeterminantsDocument3 pagesMatrices DeterminantsSUDHANSHU PANWARNo ratings yet




























































































Download as pdf or txt
You might also like
- Hassler Whitney - Tensor Products of Abelian GroupsDocument34 pagesHassler Whitney - Tensor Products of Abelian GroupsRagib ZamanNo ratings yet
- Linear Algebra Flow Diagram 1Document1 pageLinear Algebra Flow Diagram 1stansmith1100% (1)
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- Linear Algebra With Applications 2nd Edition by Holt Test BankDocument13 pagesLinear Algebra With Applications 2nd Edition by Holt Test BankvalgorbNo ratings yet
- Advanced Linear Algebra PDFDocument348 pagesAdvanced Linear Algebra PDFaviantara100% (10)
- cs229 Notes9 PDFDocument9 pagescs229 Notes9 PDFShubhamKhodiyarNo ratings yet
- Gaussian Conjugate Prior Cheat SheetDocument7 pagesGaussian Conjugate Prior Cheat SheetHirdesh KumarNo ratings yet
- Mathematical Methods MT2017: Problems 2: John - Magorrian@physics - Ox.ac - UkDocument2 pagesMathematical Methods MT2017: Problems 2: John - Magorrian@physics - Ox.ac - UkRoy VeseyNo ratings yet
- Chap2 Multivariate Normal and Related DistributionsDocument18 pagesChap2 Multivariate Normal and Related DistributionschanpeinNo ratings yet
- The Multivariate Gaussian Distribution: 1 Relationship To Univariate GaussiansDocument10 pagesThe Multivariate Gaussian Distribution: 1 Relationship To Univariate Gaussiansandrewjbrereton31No ratings yet
- Pauli Matrices: 1 Algebraic PropertiesDocument6 pagesPauli Matrices: 1 Algebraic PropertiesAnthony RogersNo ratings yet
- Multivariate AnalysisDocument25 pagesMultivariate AnalysisPaul EthamNo ratings yet
- Solv Int9712008Document6 pagesSolv Int9712008Lucas SilvaNo ratings yet
- A Relativistic Statistical Field Theory On A Discretized Minkowski Lattice With Quantum-Like ObservablesDocument21 pagesA Relativistic Statistical Field Theory On A Discretized Minkowski Lattice With Quantum-Like ObservablesBNo ratings yet
- HW1 SolutionsDocument3 pagesHW1 SolutionsyanxiaNo ratings yet
- A Pseudospectral Method For The One Dimensional Fractional Laplacian On RDocument31 pagesA Pseudospectral Method For The One Dimensional Fractional Laplacian On RRocher FerreroNo ratings yet
- Cumulative Function N Dimensional Gaussians 12.2013Document8 pagesCumulative Function N Dimensional Gaussians 12.2013msayalaNo ratings yet
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocument5 pagesCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiNo ratings yet
- Gaussian Mixture Model: P (X - Y) P (Y - X) P (X)Document3 pagesGaussian Mixture Model: P (X - Y) P (Y - X) P (X)Kishore Kumar DasNo ratings yet
- f (x) = Γ (α+β) Γ (α) Γ (β) x, for 0<x<1Document8 pagesf (x) = Γ (α+β) Γ (α) Γ (β) x, for 0<x<1Kimondo KingNo ratings yet
- The Pointwise Convergence of Möbius Maps: A.F.BeardonDocument7 pagesThe Pointwise Convergence of Möbius Maps: A.F.BeardonAnalysis JohnNo ratings yet
- A Spectral Approach To BandwidthDocument19 pagesA Spectral Approach To Bandwidthforoud_makvandi1985No ratings yet
- 10of15 - Appendix A - Mathematical BackgroundDocument8 pages10of15 - Appendix A - Mathematical BackgroundBranko NikolicNo ratings yet
- Gaussian Mixture Models: Abstract in This Chapter We First Introduce The Basic Concepts of Random VariablesDocument10 pagesGaussian Mixture Models: Abstract in This Chapter We First Introduce The Basic Concepts of Random VariablesDoddi HarishNo ratings yet
- SJC KatzDocument15 pagesSJC KatzChrisnaud DambaNo ratings yet
- The New Method: Inimum Iquid LowratesDocument9 pagesThe New Method: Inimum Iquid LowrateschristinaNo ratings yet
- Chap 2Document9 pagesChap 2MingdreamerNo ratings yet
- Research On CDRDocument24 pagesResearch On CDRCreating companyNo ratings yet
- TMA4165 Differential Equations and Dynamical Systems Spring 2018Document2 pagesTMA4165 Differential Equations and Dynamical Systems Spring 2018salimNo ratings yet
- MECOM093Document17 pagesMECOM093Jose RissoNo ratings yet
- Linear Project 1Document13 pagesLinear Project 1Megan WheelerNo ratings yet
- Remezr2 ArxivDocument30 pagesRemezr2 ArxivFlorinNo ratings yet
- FornbergDocument9 pagesFornbergSomya kumar SinghNo ratings yet
- PruebaDocument17 pagesPruebasocorroNo ratings yet
- 2 Gaussian Process PDFDocument55 pages2 Gaussian Process PDFนนฐ์ทกร บุญรักชาติNo ratings yet
- GTR2019 1Document67 pagesGTR2019 1Bhat SaqibNo ratings yet
- MCMC Bayes PDFDocument27 pagesMCMC Bayes PDFMichael TadesseNo ratings yet
- Panion PDFDocument154 pagesPanion PDFAna MariaNo ratings yet
- Adaptive MCMC For EveryoneDocument13 pagesAdaptive MCMC For EveryoneWu PkNo ratings yet
- General Principles of Brane Kinematics and DynamicsDocument12 pagesGeneral Principles of Brane Kinematics and DynamicsOliver BardinNo ratings yet
- Perspectiva Estadística de La Homología Persistente.Document26 pagesPerspectiva Estadística de La Homología Persistente.ernesto tamporaNo ratings yet
- ch1 ProbsDocument8 pagesch1 ProbsEkrem GüldesteNo ratings yet
- The Multivariate Normal Distribution: Exactly Central LimitDocument59 pagesThe Multivariate Normal Distribution: Exactly Central LimitVictor ChenNo ratings yet
- 2.4 Confidence Intervals and Prediction Intervals in Linear ModelsDocument7 pages2.4 Confidence Intervals and Prediction Intervals in Linear Modelsyusra fayyazNo ratings yet
- Introduction To MRFsDocument6 pagesIntroduction To MRFsHoward DickersonNo ratings yet
- NummaxDocument3 pagesNummaxadityowahyusaputroNo ratings yet
- An Algorithm For Choosing Best Shape Parameter ForDocument11 pagesAn Algorithm For Choosing Best Shape Parameter ForKhadija M.No ratings yet
- Lecture 24: Weighted and Generalized Least Squares 1 Weighted Least SquaresDocument8 pagesLecture 24: Weighted and Generalized Least Squares 1 Weighted Least SquaresSNo ratings yet
- 2.5.2 Multivariate DensityDocument12 pages2.5.2 Multivariate DensitymiltonsarriaNo ratings yet
- Excited States Induced Inhomogeneous SolutionDocument6 pagesExcited States Induced Inhomogeneous SolutionQ. XiangNo ratings yet
- Lecture 5Document6 pagesLecture 5aronl10No ratings yet
- Nb-Fuzzy Metric Spaces With Topological Properties and ApplicationsDocument20 pagesNb-Fuzzy Metric Spaces With Topological Properties and ApplicationsGALLEGO LUPIANEZNo ratings yet
- Exercises - Digital CommunicationsDocument34 pagesExercises - Digital CommunicationsMiguel FuentesNo ratings yet
- Euclidean Quantum Field Theory From Variational DynamicsDocument12 pagesEuclidean Quantum Field Theory From Variational DynamicsBNo ratings yet
- Theta LogDocument29 pagesTheta LogTom CruiseNo ratings yet
- Frank - Klinker@math - Tu-Dortmund - de DOI 10.1007/s00591-010-0080-8Document11 pagesFrank - Klinker@math - Tu-Dortmund - de DOI 10.1007/s00591-010-0080-8Tarkeshwar MahatoNo ratings yet
- Lecture Notes On The Gaussian DistributionDocument6 pagesLecture Notes On The Gaussian DistributionMayukh MaitraNo ratings yet
- CS 717: EndsemDocument5 pagesCS 717: EndsemGanesh RamakrishnanNo ratings yet
- Streaming Linear RegressionDocument9 pagesStreaming Linear RegressionOri CarmiNo ratings yet
- Antenna Factorization of Gauge-Theory AmplitudesDocument13 pagesAntenna Factorization of Gauge-Theory AmplitudesfarhadNo ratings yet
- Holography and CFT On Generic ManifoldsDocument9 pagesHolography and CFT On Generic ManifoldsGary JohnsonNo ratings yet
- Schoner TDocument12 pagesSchoner TEpic WinNo ratings yet
- Least Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Document12 pagesLeast Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Anonymous J1scGXwkKDNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Printf - C++ ReferenceDocument3 pagesPrintf - C++ ReferenceSergiomaguuNo ratings yet
- A Beginners Guide To Dual-QuaternionsDocument10 pagesA Beginners Guide To Dual-QuaternionsSergiomaguuNo ratings yet
- Bluetooth Support For NXTDocument5 pagesBluetooth Support For NXTSergiomaguuNo ratings yet
- Codigo Trimer 800Document1 pageCodigo Trimer 800SergiomaguuNo ratings yet
- Matrix and Determinants NotesDocument7 pagesMatrix and Determinants NotesYash TiwariNo ratings yet
- Semi-Symmetric - Spaces: M G R R R X Y M R R P M R PDocument9 pagesSemi-Symmetric - Spaces: M G R R R X Y M R R P M R PharadhanNo ratings yet
- Lec 10Document36 pagesLec 10vidhya dsNo ratings yet
- Reflective SummaryDocument2 pagesReflective SummaryIsha ChandNo ratings yet
- Nonlinear Systems: Lyapunov Stability Theory - Part 2Document36 pagesNonlinear Systems: Lyapunov Stability Theory - Part 2giacomoNo ratings yet
- Vectors, Tensors, Indices and All That - .Document7 pagesVectors, Tensors, Indices and All That - .Aayush RajputNo ratings yet
- Introduction To Dynamic Systems: Theory, Models, and Applications - David G. LuenbergerDocument3 pagesIntroduction To Dynamic Systems: Theory, Models, and Applications - David G. LuenbergerJade FrostNo ratings yet
- Sylvester Criterion For Positive DefinitenessDocument4 pagesSylvester Criterion For Positive DefinitenessArlette100% (1)
- Linear Functional AnalysisDocument9 pagesLinear Functional AnalysisΣωτήρης ΝτελήςNo ratings yet
- HW Study Packet - 1.3 Vectors and ScalarsDocument4 pagesHW Study Packet - 1.3 Vectors and ScalarsMayur VanjaniNo ratings yet
- Math Formula All Collection PDFDocument75 pagesMath Formula All Collection PDFEr S Karthick AnnamalaiNo ratings yet
- Filename: December 2014 Question & Solution PDFDocument23 pagesFilename: December 2014 Question & Solution PDFVishak H PillaiNo ratings yet
- Tutorial 1: Universiti Tunku Abdul RahmanDocument4 pagesTutorial 1: Universiti Tunku Abdul RahmanfreeloadNo ratings yet
- Solvability, Controllability, and Observability of Singular SystemsDocument20 pagesSolvability, Controllability, and Observability of Singular SystemsjavbejaranoNo ratings yet
- Further Maths 3 Revision Notes Feb 2016Document56 pagesFurther Maths 3 Revision Notes Feb 2016ayomideadare13No ratings yet
- Tutorial11 SolutionDocument2 pagesTutorial11 Solutionveena panini100% (1)
- Arkadiusz Jadczyk - Conformally Compactified Minkowski Space Myths and FactsDocument10 pagesArkadiusz Jadczyk - Conformally Compactified Minkowski Space Myths and FactsarkajadNo ratings yet
- Inverse Trigonometry Practice Sheet (FRB)Document15 pagesInverse Trigonometry Practice Sheet (FRB)abidrhymeNo ratings yet
- Jomms 08Document20 pagesJomms 08ebrahimpanNo ratings yet
- 3D Plane Stresses and Strains - QProducersDocument14 pages3D Plane Stresses and Strains - QProducersvickywce JadhavNo ratings yet
- Conference MatrixDocument5 pagesConference MatrixEleonor CamargoNo ratings yet
- Notes On Quantum Mechanics PDFDocument226 pagesNotes On Quantum Mechanics PDFhhjder_bag8995No ratings yet
- Obj Selected QsDocument31 pagesObj Selected Qsjyotisahni13No ratings yet
- Shifrin ErrataDocument3 pagesShifrin ErrataMainak SamantaNo ratings yet
- Part 02 Question (9-20)Document14 pagesPart 02 Question (9-20)Mahendra Panda0% (1)
- Matrices DeterminantsDocument3 pagesMatrices DeterminantsSUDHANSHU PANWARNo ratings yet