Download as pdf or txt
You might also like
- Mahindra 6060 6075 PDFDocument6 pagesMahindra 6060 6075 PDFParamesh SivaNo ratings yet
- Eaton 11 Hydrostatic TransmissionDocument22 pagesEaton 11 Hydrostatic Transmissionppmurillo100% (3)
- Mitsubishi mt160-180 Repair Manual Part 1 Optimized PDFDocument177 pagesMitsubishi mt160-180 Repair Manual Part 1 Optimized PDFKemal Lisnik Arnautovic100% (2)
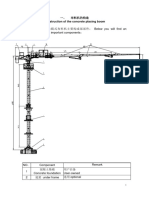
- Manul Book of Self-Climbing Concrete Placingboom PDFDocument73 pagesManul Book of Self-Climbing Concrete Placingboom PDFkha nguyenNo ratings yet
- Mitsubishi MT180HD Repair ManualDocument177 pagesMitsubishi MT180HD Repair ManualАлексей БектинNo ratings yet
- Product Manual L30B / L35BDocument67 pagesProduct Manual L30B / L35BUTILBEN SRLNo ratings yet
- RC 3307 VioDocument2 pagesRC 3307 VioCopemaq Copemaq0% (1)
- AspenTech - Compressor Modeling in Aspen HYSYS DynamicsDocument26 pagesAspenTech - Compressor Modeling in Aspen HYSYS DynamicsTaniadi SuriaNo ratings yet
- CSP 20-21 App Development Planning GuideDocument7 pagesCSP 20-21 App Development Planning GuideJoel MamanNo ratings yet
- RTV-X900 SpecsDocument1 pageRTV-X900 Specsoneof38583No ratings yet
- Motor Grader 670aDocument4 pagesMotor Grader 670aPedro Jesus LopezNo ratings yet
- 6bws11 20specsheet PDFDocument2 pages6bws11 20specsheet PDFGrupo TranzvmNo ratings yet
- Tadano MANUAL DE OPERACIONDocument20 pagesTadano MANUAL DE OPERACIONYolanda Gutierrez100% (1)
- XGC17000 1250 2023Document53 pagesXGC17000 1250 2023paul johnsonNo ratings yet
- XCT25L4 Y-CraneDocument16 pagesXCT25L4 Y-CraneDwi Rizki Luqman HakimNo ratings yet
- Crane DescriptionDocument8 pagesCrane DescriptionPrinceRaghavNo ratings yet
- 100 522 588 - FullCarBogieDocument2 pages100 522 588 - FullCarBogiezhangNo ratings yet
- Mitsubishi Mt160180 Repair ManualDocument90 pagesMitsubishi Mt160180 Repair Manualikhtiyar ali khan ikhtiyarNo ratings yet
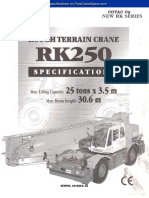
- Kobelco RK250Document8 pagesKobelco RK250SB GLOBAL GROUP BINTULU BRANCHNo ratings yet
- Yk 350 XGDocument2 pagesYk 350 XGjet.heNo ratings yet
- Specifications.: TX63 TX65 Plus TX66 TX68Document2 pagesSpecifications.: TX63 TX65 Plus TX66 TX68Hese Mas0% (1)
- Dongfeng: Seres E3Document8 pagesDongfeng: Seres E3Radu MariusNo ratings yet
- Jd570-A Motorgrader: Engine Performance Add Versatility WithDocument3 pagesJd570-A Motorgrader: Engine Performance Add Versatility WithTamquadistu AlexNo ratings yet
- 570a PDFDocument3 pages570a PDFTamquadistu AlexNo ratings yet
- Technical Training of New Model - N800 Chassis JMCDocument55 pagesTechnical Training of New Model - N800 Chassis JMCRusonegroNo ratings yet
- Motor Grader 672aDocument4 pagesMotor Grader 672aSteve LuceNo ratings yet
- 14 Vehicle SystemsDocument31 pages14 Vehicle SystemsScribdTranslationsNo ratings yet
- Paper Paper Paper Paper Paper: Guide Pin Locking Block Outer Sleeve Outer Rotor of MotorDocument4 pagesPaper Paper Paper Paper Paper: Guide Pin Locking Block Outer Sleeve Outer Rotor of MotorRizki Fajar NovantoNo ratings yet
- LAMAX E-Scooter S11600 WebDocument54 pagesLAMAX E-Scooter S11600 WebtomasNo ratings yet
- R15-MayJune 2015 Kinematics of MachineryDocument2 pagesR15-MayJune 2015 Kinematics of MachineryPraveen KumarNo ratings yet
- Unit-Simple Mechanism Revision Class: Engineering-ProjectsDocument48 pagesUnit-Simple Mechanism Revision Class: Engineering-ProjectsSHIKHAR SAXENANo ratings yet
- Universal Bugomatic Bro 03 21Document4 pagesUniversal Bugomatic Bro 03 21Victor PATIÑONo ratings yet
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotDocument5 pagesAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotPravallika YadavNo ratings yet
- zoomlion-truck-QY100 HDocument16 pageszoomlion-truck-QY100 Hالبديري بهاءNo ratings yet
- Gyroscopic Stabilization of Unstable Vehicles: An UDP Project Presentation OnDocument25 pagesGyroscopic Stabilization of Unstable Vehicles: An UDP Project Presentation OnPratham JainNo ratings yet
- Id 34 Content Product Type PDF PDFDocument40 pagesId 34 Content Product Type PDF PDFYudhi Tri IndrawanNo ratings yet
- Chapter 04 Axial Turbine PP 2020-New 2022Document62 pagesChapter 04 Axial Turbine PP 2020-New 2022Luqman NurhakimNo ratings yet
- Gear Box and Its TypesDocument11 pagesGear Box and Its Typesselenophile2719No ratings yet
- Cam Design Cam Design: Output FunctionDocument54 pagesCam Design Cam Design: Output Functionasritaip100% (1)
- Kobelco rk250 5 1Document8 pagesKobelco rk250 5 1Чингис ЭрдынеевNo ratings yet
- MCV Range Leaflet BSVI 12march20Document2 pagesMCV Range Leaflet BSVI 12march20annaji annajiNo ratings yet
- Lap Dat Cau UnicDocument52 pagesLap Dat Cau UnicMaiChiVuNo ratings yet
- 700r4 Accumulator Valve TrainDocument2 pages700r4 Accumulator Valve Traindaniel carpenterNo ratings yet
- Mechatronics: Ronghui Zhou, Argyrios Zolotas, Roger GoodallDocument15 pagesMechatronics: Ronghui Zhou, Argyrios Zolotas, Roger GoodallParthipan JayaramNo ratings yet
- Kobelco 7150 ChartDocument11 pagesKobelco 7150 ChartPemasaran InfrastrukturNo ratings yet
- DOBLOCARGO 2021 24p CT ING WebDocument13 pagesDOBLOCARGO 2021 24p CT ING WebPaul CiobanuNo ratings yet
- HSL650 7aDocument4 pagesHSL650 7ahamdi galipNo ratings yet
- Technical Proposal For GSL TransporterDocument5 pagesTechnical Proposal For GSL Transporterbhola91No ratings yet
- Transmission Valve Body Assy (U250E) : ComponentsDocument2 pagesTransmission Valve Body Assy (U250E) : ComponentsDang Tien PhucNo ratings yet
- Projectreportofvocationaltrainingat 180805190331Document36 pagesProjectreportofvocationaltrainingat 180805190331Sachin GautamNo ratings yet
- Section 8 - Flight Controls PDFDocument20 pagesSection 8 - Flight Controls PDFrobbertmd100% (1)
- Datasheet M-710iC-45MDocument1 pageDatasheet M-710iC-45MEdgar Ivan BorbollaNo ratings yet
- The New Alfa Romeo 147 Technical SpecificationDocument4 pagesThe New Alfa Romeo 147 Technical SpecificationDylan Moodley100% (1)
- JCB Tracked Excavator JS130 L T.A.B.: Static DimensionsDocument6 pagesJCB Tracked Excavator JS130 L T.A.B.: Static DimensionsKovacs Zsolt-Istvan100% (1)
- STC-TRS-Conv-03-Details of Mechanical Equipment of AC Elect Conventional Loco PDFDocument126 pagesSTC-TRS-Conv-03-Details of Mechanical Equipment of AC Elect Conventional Loco PDFsiva shankarNo ratings yet
- Weichai Sdac HybridDocument1 pageWeichai Sdac HybridJOSE EDUARDO VASQUEZ TAVAREZNo ratings yet
- Power Take-Off Clutches: Mechanical DesignDocument5 pagesPower Take-Off Clutches: Mechanical DesignEdgar Angulo ArizaNo ratings yet
- Kyb Hydraulic Parts CatalogDocument35 pagesKyb Hydraulic Parts CatalogEUROPARTS100% (6)
- Volvo 8900 Electric Data SheetDocument4 pagesVolvo 8900 Electric Data SheetJuan Carlos Mella OlivoNo ratings yet
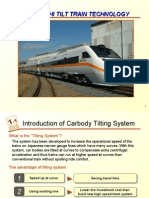
- Hitachi 簡報Document15 pagesHitachi 簡報靖楓No ratings yet
- Hero Honda Pleasure Vs Honda Activa Vs Honda Aviator Vs Suzuki Access Vs Kinetic Flyte Vs Bajaj Kristal Vs TVS Scooty Pep+ Vs TVS Scooty StreakDocument6 pagesHero Honda Pleasure Vs Honda Activa Vs Honda Aviator Vs Suzuki Access Vs Kinetic Flyte Vs Bajaj Kristal Vs TVS Scooty Pep+ Vs TVS Scooty StreakNoman KhanNo ratings yet
- CSRDocument16 pagesCSRAnkit YadavNo ratings yet
- Currency Detection For Blind PeopleDocument19 pagesCurrency Detection For Blind Peoplehaffah1245No ratings yet
- Which of The Following Is An External Sorting?: Merge Sort Tree Sort Bubble Sort Insertion SortDocument3 pagesWhich of The Following Is An External Sorting?: Merge Sort Tree Sort Bubble Sort Insertion SortAjay BhoopalNo ratings yet
- Suppex Capital Advisory - Firm ProfileDocument6 pagesSuppex Capital Advisory - Firm ProfileLang'a Santiago MweeneNo ratings yet
- City Builder 10 - Governmental PlacesDocument30 pagesCity Builder 10 - Governmental Placesskypalae86% (7)
- Viking Johnson Dismantling Joint+BrochureDocument13 pagesViking Johnson Dismantling Joint+BrochureecocadecNo ratings yet
- 2018 Resume NVDocument1 page2018 Resume NVcourtney willsonNo ratings yet
- CPL EbrochureDocument4 pagesCPL EbrochureAnuj_WNo ratings yet
- Merging Systems Into A SysplexDocument434 pagesMerging Systems Into A Sysplexgborja8881331No ratings yet
- CAD Sales Request 16053-0 Scope of Supply Preview: DEUTZ Engine DocumentationDocument4 pagesCAD Sales Request 16053-0 Scope of Supply Preview: DEUTZ Engine DocumentationEric ChuNo ratings yet
- Shreya Dikshit ISSNDocument16 pagesShreya Dikshit ISSNPratikNo ratings yet
- 27 RevatiDocument4 pages27 RevatiOzy CanNo ratings yet
- Modeling and Simulations of Dielectric MaterialsDocument65 pagesModeling and Simulations of Dielectric Materialsprian100% (1)
- Semantic Segmentation Data Labelling: Classes and InstructionsDocument9 pagesSemantic Segmentation Data Labelling: Classes and InstructionsMar FieldsNo ratings yet
- Iit Ba Project Swat Analysis of AmwayDocument42 pagesIit Ba Project Swat Analysis of AmwayNabajyoti PhukanNo ratings yet
- Luyện thi vào lớp 6: chuyên Anh, chuyên đề Viết lại câuDocument9 pagesLuyện thi vào lớp 6: chuyên Anh, chuyên đề Viết lại câuLệ NguyễnNo ratings yet
- CH 2 - Guide To Physics PracticalsDocument20 pagesCH 2 - Guide To Physics PracticalsNong Hm100% (2)
- Cbu Credit Card Details FormDocument1 pageCbu Credit Card Details FormdollarNo ratings yet
- New ThummaDocument5 pagesNew ThummaSabharish KoruturuNo ratings yet
- Aplicacion Corto 3Document5 pagesAplicacion Corto 3Garbel LemusNo ratings yet
- Revenue and Treasury Management Offices in The PhilippinesDocument73 pagesRevenue and Treasury Management Offices in The Philippinesmarj berting67% (3)
- Shiatsu: by Ciro Albuquerque IIDocument23 pagesShiatsu: by Ciro Albuquerque IICiro AlbuquerqueNo ratings yet
- Pre-Test Micro Past Papers 2020Document11 pagesPre-Test Micro Past Papers 2020Thanatchawan Janwaro100% (1)
- RPT Internal Scheme ReportDocument16 pagesRPT Internal Scheme ReportChaitanya GunturuNo ratings yet
- Pattern, Price and Time - Using Gann TheoryDocument29 pagesPattern, Price and Time - Using Gann TheoryRohitOhri44% (9)
- QuickRide LogcatDocument179 pagesQuickRide Logcatap131096No ratings yet
- Resume Goutam AdwantDocument3 pagesResume Goutam AdwantGoutamNo ratings yet
- First Observation - Lesson PlanDocument2 pagesFirst Observation - Lesson Planapi-391549505No ratings yet