Download as pdf or txt
You might also like
- Assignment2 40168195Document10 pagesAssignment2 40168195saumya1159950% (2)
- DL Unit-2Document24 pagesDL Unit-2Kalpana MNo ratings yet
- OPTI 517 - HW1 - JillellaDocument11 pagesOPTI 517 - HW1 - JillellaPriyanka JillellaNo ratings yet
- SP18 CS182 Midterm Solutions - EditedDocument14 pagesSP18 CS182 Midterm Solutions - EditedHasimNo ratings yet
- JCM 6000 PresentaciónDocument47 pagesJCM 6000 PresentaciónLeah LopezNo ratings yet
- Dell - Selling Process and Lead GenerationDocument8 pagesDell - Selling Process and Lead GenerationAbhishek MandaviyaNo ratings yet
- Submitted By: Abhinaya Srivastava ME Modular CSE Department Roll No:181401Document36 pagesSubmitted By: Abhinaya Srivastava ME Modular CSE Department Roll No:181401Abhinaya SrivastavaNo ratings yet
- Tut 1 DipDocument2 pagesTut 1 DipVineet RanjanNo ratings yet
- Lab 5 Report PDFDocument13 pagesLab 5 Report PDFTamilinbaaNo ratings yet
- Kernel Matrix Factorization ModelsDocument8 pagesKernel Matrix Factorization Modelsnormal lochuhsinNo ratings yet
- Regression Practice: KWH HDD RefDocument8 pagesRegression Practice: KWH HDD RefdavidNo ratings yet
- 3 RegressionDocument23 pages3 RegressionJOJO100% (1)
- Clustering - Fuzzy C-MeansDocument5 pagesClustering - Fuzzy C-MeansKarthikRam KvNo ratings yet
- Activation FunctionsDocument8 pagesActivation FunctionsRoushan GiriNo ratings yet
- Schaums07 InteriorDocument62 pagesSchaums07 InterioracademicopersonalNo ratings yet
- Adaptive Segmentation Algorithm Based On Level Set Model in Medical ImagingDocument9 pagesAdaptive Segmentation Algorithm Based On Level Set Model in Medical ImagingTELKOMNIKANo ratings yet
- Unit - 5 Image Enhancement in Spatial DomainDocument26 pagesUnit - 5 Image Enhancement in Spatial DomainJeethan100% (1)
- A Block Coordinate Descent-Based Projected GradientAlgorithm For Orthogonal Non-Negative Matrix FactorizationDocument22 pagesA Block Coordinate Descent-Based Projected GradientAlgorithm For Orthogonal Non-Negative Matrix Factorization余深宝No ratings yet
- Face Recognition System Using Deep LearningDocument12 pagesFace Recognition System Using Deep LearningAttars TameemNo ratings yet
- Solid-State LaserDocument7 pagesSolid-State LaserAdel AbdallahNo ratings yet
- Image Restoration - Fundamentals and AdvancesDocument376 pagesImage Restoration - Fundamentals and AdvancesPanagiotis TrochidisNo ratings yet
- EEE421 LAB 1 PracticalDocument4 pagesEEE421 LAB 1 PracticaltawandaNo ratings yet
- Answers For End-Sem Exam Part - 2 (Deep Learning)Document20 pagesAnswers For End-Sem Exam Part - 2 (Deep Learning)Ankur BorkarNo ratings yet
- Practice Final sp22Document10 pagesPractice Final sp22Ajue RamliNo ratings yet
- Tutorial 2 PDFDocument1 pageTutorial 2 PDFUddeshya GuptaNo ratings yet
- Face Recognition Using Neural NetworkDocument31 pagesFace Recognition Using Neural Networkvishnu vNo ratings yet
- Analog Communications Lab ManualDocument137 pagesAnalog Communications Lab Manualsiva100% (1)
- InVia Qontor Confocal Raman MicroscopeDocument4 pagesInVia Qontor Confocal Raman MicroscopeMoritz BlgrNo ratings yet
- InVia Raman Microscope - Excitation Wavelength OptionsDocument4 pagesInVia Raman Microscope - Excitation Wavelength OptionsSindhuraj MukherjeeNo ratings yet
- CH 06Document20 pagesCH 06jy zNo ratings yet
- Unit 3 - Machine Learning - WWW - Rgpvnotes.inDocument29 pagesUnit 3 - Machine Learning - WWW - Rgpvnotes.inASHOKA KUMARNo ratings yet
- QNET ROTPEN User ManualDocument26 pagesQNET ROTPEN User ManualSuryabhan SinghNo ratings yet
- Numerical Differentiation & Integration: 8.2.1 Derivatives Using Newton's Forward Interpolation FormulaDocument22 pagesNumerical Differentiation & Integration: 8.2.1 Derivatives Using Newton's Forward Interpolation FormulairinNo ratings yet
- Ece404 Digital-Image-Processing TH 1.00 Ac16Document1 pageEce404 Digital-Image-Processing TH 1.00 Ac16Sampath ReddyNo ratings yet
- Image Processing To Manipulate RGB Values Using Verilog.Document5 pagesImage Processing To Manipulate RGB Values Using Verilog.Ashutosh LembheNo ratings yet
- Presentation About Edge DetectionDocument23 pagesPresentation About Edge DetectionUvasre SundarNo ratings yet
- Chapter-5 Curve FittingDocument48 pagesChapter-5 Curve FittingZeynadin ABNo ratings yet
- Performance of 8-Psk Modulation Scheme Using Rayleigh Fading Channel For Wcdma SystemDocument7 pagesPerformance of 8-Psk Modulation Scheme Using Rayleigh Fading Channel For Wcdma SystemANIKNo ratings yet
- InterpolationDocument25 pagesInterpolationAjay SinghNo ratings yet
- Chap 12Document120 pagesChap 12Phuc LxNo ratings yet
- MC0086 Digital Image ProcessingDocument9 pagesMC0086 Digital Image ProcessingGaurav Singh JantwalNo ratings yet
- Ipmv NotesDocument125 pagesIpmv Notessniper x4848 PillaiNo ratings yet
- TCP426 Practical FileDocument23 pagesTCP426 Practical FileAbhishek ChaudharyNo ratings yet
- CA Classes-155-160Document6 pagesCA Classes-155-160SrinivasaRaoNo ratings yet
- The Research of Camera Distortion Correction Basing On Neural NetworkDocument6 pagesThe Research of Camera Distortion Correction Basing On Neural NetworkSeetha ChinnaNo ratings yet
- DRIVE: Digital Retinal Images For Vessel ExtractionDocument5 pagesDRIVE: Digital Retinal Images For Vessel ExtractionRohitNo ratings yet
- On Computer Vision For Augmented RealityDocument4 pagesOn Computer Vision For Augmented RealityAditya IyerNo ratings yet
- Contrasting Telephony and Ipv6: Javier SaulerDocument6 pagesContrasting Telephony and Ipv6: Javier SaulerJavier SaulerNo ratings yet
- Moving Object Detection Using Local Binary Pattern and Gaussian Background ModelDocument10 pagesMoving Object Detection Using Local Binary Pattern and Gaussian Background ModelJEEVIT HNo ratings yet
- Assignment 4Document3 pagesAssignment 4Ece Ebru KayaNo ratings yet
- The Effect of I Mage Resolution On The Performance of A Face Recognition SystemDocument6 pagesThe Effect of I Mage Resolution On The Performance of A Face Recognition SystemJohn GreenNo ratings yet
- De True-Colors PDFDocument5 pagesDe True-Colors PDFMahesh SbNo ratings yet
- Object Detection and Shadow Removal From Video StreamDocument10 pagesObject Detection and Shadow Removal From Video StreamPaolo PinoNo ratings yet
- A Deep Neural Network For Image Quality AssessmentDocument5 pagesA Deep Neural Network For Image Quality Assessmentgitov13916No ratings yet
- Identification of Structures From Powder X-Ray Diffraction DataDocument4 pagesIdentification of Structures From Powder X-Ray Diffraction DataCarla ParraNo ratings yet
- Image Deblurring Using A Neural Network Approach: ISSN: 2277-3754Document4 pagesImage Deblurring Using A Neural Network Approach: ISSN: 2277-3754Simona StolnicuNo ratings yet
- Image RestorationDocument6 pagesImage RestorationNorzaliza BidinNo ratings yet
- LP III Lab ManualDocument8 pagesLP III Lab Manualsaket bharati100% (1)
- Image Auto EncoderDocument17 pagesImage Auto EncoderJim BeamNo ratings yet
- Vision Based Lane Detection For Unmanned Ground Vehicle (UGV)Document19 pagesVision Based Lane Detection For Unmanned Ground Vehicle (UGV)AjayNo ratings yet
- Bundle Adjustment: Optimizing Visual Data for Precise ReconstructionFrom EverandBundle Adjustment: Optimizing Visual Data for Precise ReconstructionNo ratings yet
- Chapter 13 Innovation, Intrapreneurship, and Creativity: Organizational Theory, Design, and Change, 7e (Jones)Document22 pagesChapter 13 Innovation, Intrapreneurship, and Creativity: Organizational Theory, Design, and Change, 7e (Jones)Turki Jarallah0% (1)
- SAP 101 - Beginners SAPDocument15 pagesSAP 101 - Beginners SAPAdarsh100% (3)
- Chapter 1 Introduction To SecurityDocument7 pagesChapter 1 Introduction To SecurityJohn JuniorNo ratings yet
- Restarting The Unresponsive Adaptive Job Service Using A ScriptDocument2 pagesRestarting The Unresponsive Adaptive Job Service Using A ScriptKalyanNo ratings yet
- 6.6 NotesDocument13 pages6.6 NoteszufaroaaNo ratings yet
- CRUD Application in Zend FrameworkDocument9 pagesCRUD Application in Zend FrameworkHumus BalzerumNo ratings yet
- Girish ChandraDocument4 pagesGirish ChandraGirish ChandraNo ratings yet
- DLD Assignment 1Document5 pagesDLD Assignment 1Asfand Yar0% (1)
- A VueJS Cheatsheet For Developers by LearnVue - Co - LearnVue-Vue-3-CheatsheetDocument4 pagesA VueJS Cheatsheet For Developers by LearnVue - Co - LearnVue-Vue-3-Cheatsheetjosuè100% (1)
- DS-2CD3123G0E-I (W) (S) Datasheet V5.5.3 20180706Document5 pagesDS-2CD3123G0E-I (W) (S) Datasheet V5.5.3 20180706Sandeep KamatNo ratings yet
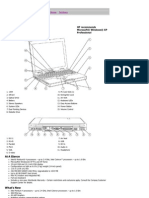
- Compaq Evo n1020Document13 pagesCompaq Evo n1020Pdp PercentNo ratings yet
- Certificate of Inheritance Usa - PRNTBL - Concejomunicipaldechinu.gov - Co 2Document1 pageCertificate of Inheritance Usa - PRNTBL - Concejomunicipaldechinu.gov - Co 2warnergrace577No ratings yet
- Product:: 10GX Cat 6A+ Cable, S/FTP, LSZH, 4 Pair, AWG 23, Indoor CPR EcaDocument3 pagesProduct:: 10GX Cat 6A+ Cable, S/FTP, LSZH, 4 Pair, AWG 23, Indoor CPR EcaJohn SabestianNo ratings yet
- Epicor Eclipse BR ENSDocument24 pagesEpicor Eclipse BR ENSerickmokNo ratings yet
- RMC No. 72-2018Document8 pagesRMC No. 72-2018Larry Tobias Jr.No ratings yet
- Innovating With Data and Google CloudDocument82 pagesInnovating With Data and Google Clouditengg52No ratings yet
- Taxation Of: "The Digital Economy"Document5 pagesTaxation Of: "The Digital Economy"Stefanny BedoyaNo ratings yet
- Control No. - Control No. - : Raffle Ticket TemplateDocument1 pageControl No. - Control No. - : Raffle Ticket TemplateAnonymous BBs1xxk96VNo ratings yet
- Skittle Part 3Document3 pagesSkittle Part 3api-325020845No ratings yet
- PODAI Active, Invited Students-ListDocument30 pagesPODAI Active, Invited Students-ListSouradeep GuptaNo ratings yet
- NotebudgetDocument2 pagesNotebudgetandrei santosNo ratings yet
- Be To + Infi Nitive Be About To + Infi Nitive: Unit 14BDocument4 pagesBe To + Infi Nitive Be About To + Infi Nitive: Unit 14BMarinaNo ratings yet
- Restaurant Management SystemDocument55 pagesRestaurant Management SystemJp Technical33% (3)
- Cs6702 Graph Theory and Applications Notes PDF Book - CompressedDocument153 pagesCs6702 Graph Theory and Applications Notes PDF Book - CompressedThanga Abirami100% (1)
- Swinv2000 ManualDocument6 pagesSwinv2000 ManualventerhermanjNo ratings yet
- Results View Sample ReportDocument4 pagesResults View Sample ReportSaul MonroyNo ratings yet
- Assistive Technology For People With Disabilities 2nd EditionDocument52 pagesAssistive Technology For People With Disabilities 2nd Editionmatthew.grasso983100% (51)
- FirewallDocument13 pagesFirewallGazal GuptaNo ratings yet
- Surveying Your Digital Landscape DZDocument3 pagesSurveying Your Digital Landscape DZflowctrltmojoNo ratings yet