
Module 2 - Errors and Acuracy in Astro-Navigation
Module 2 - Errors and Acuracy in Astro-Navigation
You might also like
- Useful Formulas For Astronomy & Astrophysics OlympiadDocument1 pageUseful Formulas For Astronomy & Astrophysics Olympiadvosmera83% (6)
- Combined Method of Sight ReductionDocument5 pagesCombined Method of Sight Reductionduckhaiip197No ratings yet
- Plotting-Chart PDFDocument75 pagesPlotting-Chart PDFoto saviour100% (1)
- Orca Share Media1571479592371Document39 pagesOrca Share Media1571479592371Ran CamallereNo ratings yet
- Plotting ChartDocument75 pagesPlotting ChartMegat Rambai Sr100% (11)
- Chapter9 Geodetic Aspects of Celestial NavigationDocument4 pagesChapter9 Geodetic Aspects of Celestial NavigationYasser MetaweaNo ratings yet
- Amplitude Versus Offset (AVO) and AVO Inversion: Purpose: Seismic Lithology And/or Fluid EstimationDocument43 pagesAmplitude Versus Offset (AVO) and AVO Inversion: Purpose: Seismic Lithology And/or Fluid EstimationIlyas Arya100% (1)
- Errata For Instructor's Solutions Manual For Gravity, An Introduction To Einstein's General RelativityDocument11 pagesErrata For Instructor's Solutions Manual For Gravity, An Introduction To Einstein's General RelativityoinkmanNo ratings yet
- Sight Reduction1Document81 pagesSight Reduction1Gregormartin MartinNo ratings yet
- Silvertooth PDFDocument5 pagesSilvertooth PDFLusi FlorovaNo ratings yet
- Spacecraft Dynamics Homework 1Document6 pagesSpacecraft Dynamics Homework 1TrevorNo ratings yet
- Surveying & Levelling: Lecture # 3 Theodolite TraversingDocument11 pagesSurveying & Levelling: Lecture # 3 Theodolite Traversingzain IshaqNo ratings yet
- Chapter 9 - Geodetic Aspects of Celestial NavigationDocument5 pagesChapter 9 - Geodetic Aspects of Celestial NavigationslavkovitlovNo ratings yet
- DS Cap 7-9Document51 pagesDS Cap 7-9Enrique ArroyoNo ratings yet
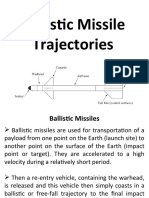
- Ballistic Missile TrajectoriesDocument48 pagesBallistic Missile TrajectoriesJunnuNo ratings yet
- Efecto DopplerDocument8 pagesEfecto Dopplerdarlis ballesta belloNo ratings yet
- All CombinedDocument96 pagesAll Combinedashish kumarNo ratings yet
- Chapter 2 Trigonometric HeightingDocument22 pagesChapter 2 Trigonometric HeightingMuhdFikriNo ratings yet
- Dark Ages Script PDFDocument75 pagesDark Ages Script PDFgarfacio30No ratings yet
- Calculation of Navigational Parameters IN Meridian, Equator AND Parallel Sailing BY Means OF Relative Coordinates AND Correlation FactorsDocument7 pagesCalculation of Navigational Parameters IN Meridian, Equator AND Parallel Sailing BY Means OF Relative Coordinates AND Correlation FactorsDuje BogdanovićNo ratings yet
- Dilution of PrecisionDocument5 pagesDilution of PrecisionEEpro808No ratings yet
- Reflection Coefficients: For A Downward Travelling P Wave, For The Most General CaseDocument27 pagesReflection Coefficients: For A Downward Travelling P Wave, For The Most General CaseshantanurilNo ratings yet
- JS Atomic Lecture5 6Document11 pagesJS Atomic Lecture5 6Daniel MiculaNo ratings yet
- GNSS Surveying,: GPS Error-2Document50 pagesGNSS Surveying,: GPS Error-2ciprian preda100% (1)
- Migration&Pstm LKDocument75 pagesMigration&Pstm LKPallav KumarNo ratings yet
- NAV 224 PPT Semi Final Week 1 2Document60 pagesNAV 224 PPT Semi Final Week 1 2Jethro Lars UmbaoNo ratings yet
- Redshift and Energy ConservationDocument22 pagesRedshift and Energy ConservationqwertyNo ratings yet
- SVG - Topic 9 - Traverse AdjustmentDocument13 pagesSVG - Topic 9 - Traverse Adjustmentsilver dustNo ratings yet
- Reciprocal Leveling: Report TitleDocument13 pagesReciprocal Leveling: Report TitleDaneal Sofi0% (1)
- The Bedford Level Experiment ExplainedDocument7 pagesThe Bedford Level Experiment ExplainedPeter AllisonNo ratings yet
- Dispersion of Light - Prism - SpectroDocument4 pagesDispersion of Light - Prism - SpectroDR.P.V.Kanaka RaoNo ratings yet
- 02 EllipsometryDocument14 pages02 EllipsometryAndrew HendershotNo ratings yet
- Bode Plots (Note) PDFDocument5 pagesBode Plots (Note) PDFTejaswi J DamerlaNo ratings yet
- Physics 430: Lecture 19 Kepler Orbits: Dale E. GaryDocument12 pagesPhysics 430: Lecture 19 Kepler Orbits: Dale E. GaryZairNo ratings yet
- Third-order PLL: Phase detector Loop Filter F(s) VCO φ (t) φ (t) Phase detector Loop Filter F(s) VCO φ (t) φ (t)Document18 pagesThird-order PLL: Phase detector Loop Filter F(s) VCO φ (t) φ (t) Phase detector Loop Filter F(s) VCO φ (t) φ (t)How Hwan WongNo ratings yet
- Brachistochrone Problem Inside The Earth Revisited: Motohiko SaitohDocument4 pagesBrachistochrone Problem Inside The Earth Revisited: Motohiko SaitohFlor Hernandez TiscareñoNo ratings yet
- L13 WavesAndRaysII PDFDocument11 pagesL13 WavesAndRaysII PDFSugeng KurniawanNo ratings yet
- BPhO 2020 MSDocument8 pagesBPhO 2020 MSnadiaNo ratings yet
- Chapter 16 - Navigational ErrorsDocument4 pagesChapter 16 - Navigational ErrorsslavkovitlovNo ratings yet
- Poincare ToulouseDocument32 pagesPoincare ToulouseAkram BelayadiNo ratings yet
- Experiment To Test Absolute Motion 3 FINAL1Document7 pagesExperiment To Test Absolute Motion 3 FINAL1Henok TadesseNo ratings yet
- Crankshaft Conecting RodDocument6 pagesCrankshaft Conecting RodMuhammad Farhan Bin SukorNo ratings yet
- Chapter 13 - Mercator Charts and Plotting SheetsDocument3 pagesChapter 13 - Mercator Charts and Plotting SheetsslavkovitlovNo ratings yet
- Chapter 12 - The SailingsDocument22 pagesChapter 12 - The SailingsEmerito ZamoraNo ratings yet
- A Summary of AVO and Inversion TechniquesDocument69 pagesA Summary of AVO and Inversion TechniquesriyadiNo ratings yet
- Progress in Electromagnetics Research Letters, Vol. 10, 77-86, 2009Document10 pagesProgress in Electromagnetics Research Letters, Vol. 10, 77-86, 2009Abdul Razzaq FarooqiNo ratings yet
- White WlDocument96 pagesWhite WlcalvinNo ratings yet
- Superluminal Motion and Doppler BoostingDocument21 pagesSuperluminal Motion and Doppler BoostingRohith ShashankNo ratings yet
- Intensities Factors: AccomDocument6 pagesIntensities Factors: Accomehagar60No ratings yet
- EE309 Notes 20 PDFDocument3 pagesEE309 Notes 20 PDFHassan FarssiNo ratings yet
- A Survey of Clear Air Turbulence and Its Effect On "Seeing": B. Roy Frieden July 2, 2001Document24 pagesA Survey of Clear Air Turbulence and Its Effect On "Seeing": B. Roy Frieden July 2, 2001kicker911No ratings yet
- Al Khateb2016Document8 pagesAl Khateb2016NiteshNo ratings yet
- Chapter 6 - Methods For Latitude and Longitude MeasurementsDocument11 pagesChapter 6 - Methods For Latitude and Longitude MeasurementsslavkovitlovNo ratings yet
- Alghero Kalnay4 EnKFclassDocument24 pagesAlghero Kalnay4 EnKFclassBaoNo ratings yet
- The Motion of The Observer in Celestial NavigationDocument5 pagesThe Motion of The Observer in Celestial NavigationSandunMigaraNo ratings yet
- Performance of Hybrid Occulters Using Apodized Pupil Lyot CoronagraphyDocument7 pagesPerformance of Hybrid Occulters Using Apodized Pupil Lyot CoronagraphyBubu BibuNo ratings yet
- Unit 3 - Control Systems - WWW - Rgpvnotes.inDocument11 pagesUnit 3 - Control Systems - WWW - Rgpvnotes.inpeacepalharshNo ratings yet
- Lecture#3, Differential Level ErrorsDocument11 pagesLecture#3, Differential Level ErrorsMohammed Fadhil HamaNo ratings yet
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsFrom EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo ratings yet
- Effect of WindDocument11 pagesEffect of WindHarikrishnaNo ratings yet
- (Flfra/trf, Q': FTR Ifcr (Document3 pages(Flfra/trf, Q': FTR Ifcr (HarikrishnaNo ratings yet
- Transverse ThrustDocument5 pagesTransverse ThrustHarikrishnaNo ratings yet
- Pivot PointDocument3 pagesPivot PointHarikrishnaNo ratings yet
- 02 History & Future of Container ShipsDocument8 pages02 History & Future of Container ShipsHarikrishnaNo ratings yet
- Ffiffi, A-Ffi E: O : +rfirorpqtqnuqDocument63 pagesFfiffi, A-Ffi E: O : +rfirorpqtqnuqHarikrishnaNo ratings yet
- 202112150445245849959extrafirstclassnotice 15 12 21Document3 pages202112150445245849959extrafirstclassnotice 15 12 21HarikrishnaNo ratings yet
- 01 Introduction To Container ShipsDocument9 pages01 Introduction To Container ShipsHarikrishnaNo ratings yet
- SR.N O Name of Active Msvs Ais Make / Number Registration No. Details of DatDocument16 pagesSR.N O Name of Active Msvs Ais Make / Number Registration No. Details of DatHarikrishnaNo ratings yet
- R - d3.Rs: Vacancy CircularDocument11 pagesR - d3.Rs: Vacancy CircularHarikrishnaNo ratings yet
- NTExam Circular No 04 of 2021 Clarificationregardingmedicalfitnesscertificateforupgradationandrevalidationof COPand COCDocument1 pageNTExam Circular No 04 of 2021 Clarificationregardingmedicalfitnesscertificateforupgradationandrevalidationof COPand COCHarikrishnaNo ratings yet
- Charts NavigationDocument72 pagesCharts NavigationHarikrishnaNo ratings yet
- Vacancy Circular: 10 As OnDocument12 pagesVacancy Circular: 10 As OnHarikrishnaNo ratings yet
- Exit ExamsDocument2 pagesExit ExamsHarikrishnaNo ratings yet
- Operation and Service Manual For Hermetic Utimeter Rtex: MMC AdaptorsDocument62 pagesOperation and Service Manual For Hermetic Utimeter Rtex: MMC AdaptorsHarikrishnaNo ratings yet
- 38681bos28185 SM cp4Document65 pages38681bos28185 SM cp4HarikrishnaNo ratings yet
- Masthead Light: Lights and ShapesDocument16 pagesMasthead Light: Lights and ShapesHarikrishnaNo ratings yet
- Preparation For An AuditDocument37 pagesPreparation For An AuditHarikrishnaNo ratings yet
- Basic Concepts Internal ControlDocument31 pagesBasic Concepts Internal ControlHarikrishnaNo ratings yet
- Verification of Assets and Liabilities: Basic ConceptsDocument59 pagesVerification of Assets and Liabilities: Basic ConceptsHarikrishnaNo ratings yet
- The Company Audit - II: © The Institute of Chartered Accountants of IndiaDocument35 pagesThe Company Audit - II: © The Institute of Chartered Accountants of IndiaHarikrishnaNo ratings yet
- Software Engineering. Specification, Implementation, VerificationDocument186 pagesSoftware Engineering. Specification, Implementation, Verificationazariel.rodrigo100% (1)
- EXAM COG-622: IBM Cognos 10 BI AdministratorDocument16 pagesEXAM COG-622: IBM Cognos 10 BI AdministratorSaptarshi Dey0% (1)
- Law Enforcement Agency Indentifiers Crosswalk, 2012Document23 pagesLaw Enforcement Agency Indentifiers Crosswalk, 2012Samuel KaminNo ratings yet
- GEO01 - CO1.2 - Introduction To Earth Science (Geology)Document14 pagesGEO01 - CO1.2 - Introduction To Earth Science (Geology)Ghia PalarcaNo ratings yet
- Summary 2Document2 pagesSummary 2Admin OfficeNo ratings yet
- Forms PensionersDocument15 pagesForms PensionersAnimesh DasNo ratings yet
- Jadwal Pertandingan Liga Inggris 2009-2010Document11 pagesJadwal Pertandingan Liga Inggris 2009-2010Adjie SatryoNo ratings yet
- In-Band Full-Duplex Interference For Underwater Acoustic Communication SystemsDocument6 pagesIn-Band Full-Duplex Interference For Underwater Acoustic Communication SystemsHarris TsimenidisNo ratings yet
- Alarm Security Pic - Google ShoppingDocument1 pageAlarm Security Pic - Google Shoppingleeleeleebc123No ratings yet
- Cvp-Analysis AbsvarcostingDocument13 pagesCvp-Analysis AbsvarcostingGwy PagdilaoNo ratings yet
- In Re Plagiarism Case Against Justice Del CastilloDocument112 pagesIn Re Plagiarism Case Against Justice Del CastilloRaffyLaguesmaNo ratings yet
- Nursing Care PlanDocument4 pagesNursing Care PlanPutra AginaNo ratings yet
- Name:-Muhammad Shabbir Roll No. 508194950Document11 pagesName:-Muhammad Shabbir Roll No. 508194950Muhammad ShabbirNo ratings yet
- BlueStack Platform Marketing PlanDocument10 pagesBlueStack Platform Marketing PlanFıratcan KütükNo ratings yet
- The Ezekiel Cycle of 500 YearsDocument1 pageThe Ezekiel Cycle of 500 YearsOtis Arms100% (1)
- GDPR ReportDocument84 pagesGDPR ReportKingPlaysNo ratings yet
- Lesson Plan 8 (September) (AutoRecovered) 1Document3 pagesLesson Plan 8 (September) (AutoRecovered) 1Rutchie AbantoNo ratings yet
- Tuyển Sinh 10 - đề 1 -KeyDocument5 pagesTuyển Sinh 10 - đề 1 -Keynguyenhoang17042004No ratings yet
- MC&OB Unit 4Document17 pagesMC&OB Unit 4Tanya MalviyaNo ratings yet
- Dialogic DSI Signaling Servers: SIU Mode User ManualDocument304 pagesDialogic DSI Signaling Servers: SIU Mode User ManualAdiansyah Rama67% (3)
- Sensorless BLDCControl S08 MP16Document52 pagesSensorless BLDCControl S08 MP16Sachin PatilNo ratings yet
- Teachers' Interview PDFDocument38 pagesTeachers' Interview PDFlalitNo ratings yet
- Research PaperDocument7 pagesResearch PaperHazirah AmniNo ratings yet
- Elrc 4507 Unit PlanDocument4 pagesElrc 4507 Unit Planapi-284973023No ratings yet
- 3) 2013 March - The Thing About Ms. Hollis MaynellDocument23 pages3) 2013 March - The Thing About Ms. Hollis MaynellShy TolentinoNo ratings yet
- sn74hct138 PDFDocument21 pagessn74hct138 PDFpabloNo ratings yet
- ManualeDelphi IngleseDocument86 pagesManualeDelphi IngleseoxooxooxoNo ratings yet
- Simatic S7 Mpi Direct DriverDocument50 pagesSimatic S7 Mpi Direct Drivernilton_bertoldoNo ratings yet
- TakeawayDocument6 pagesTakeawayWilman VasquezNo ratings yet
- Form 137Document2 pagesForm 137Raymund BondeNo ratings yet









































































































Download as pdf or txt
You might also like
- Useful Formulas For Astronomy & Astrophysics OlympiadDocument1 pageUseful Formulas For Astronomy & Astrophysics Olympiadvosmera83% (6)
- Combined Method of Sight ReductionDocument5 pagesCombined Method of Sight Reductionduckhaiip197No ratings yet
- Plotting-Chart PDFDocument75 pagesPlotting-Chart PDFoto saviour100% (1)
- Orca Share Media1571479592371Document39 pagesOrca Share Media1571479592371Ran CamallereNo ratings yet
- Plotting ChartDocument75 pagesPlotting ChartMegat Rambai Sr100% (11)
- Chapter9 Geodetic Aspects of Celestial NavigationDocument4 pagesChapter9 Geodetic Aspects of Celestial NavigationYasser MetaweaNo ratings yet
- Amplitude Versus Offset (AVO) and AVO Inversion: Purpose: Seismic Lithology And/or Fluid EstimationDocument43 pagesAmplitude Versus Offset (AVO) and AVO Inversion: Purpose: Seismic Lithology And/or Fluid EstimationIlyas Arya100% (1)
- Errata For Instructor's Solutions Manual For Gravity, An Introduction To Einstein's General RelativityDocument11 pagesErrata For Instructor's Solutions Manual For Gravity, An Introduction To Einstein's General RelativityoinkmanNo ratings yet
- Sight Reduction1Document81 pagesSight Reduction1Gregormartin MartinNo ratings yet
- Silvertooth PDFDocument5 pagesSilvertooth PDFLusi FlorovaNo ratings yet
- Spacecraft Dynamics Homework 1Document6 pagesSpacecraft Dynamics Homework 1TrevorNo ratings yet
- Surveying & Levelling: Lecture # 3 Theodolite TraversingDocument11 pagesSurveying & Levelling: Lecture # 3 Theodolite Traversingzain IshaqNo ratings yet
- Chapter 9 - Geodetic Aspects of Celestial NavigationDocument5 pagesChapter 9 - Geodetic Aspects of Celestial NavigationslavkovitlovNo ratings yet
- DS Cap 7-9Document51 pagesDS Cap 7-9Enrique ArroyoNo ratings yet
- Ballistic Missile TrajectoriesDocument48 pagesBallistic Missile TrajectoriesJunnuNo ratings yet
- Efecto DopplerDocument8 pagesEfecto Dopplerdarlis ballesta belloNo ratings yet
- All CombinedDocument96 pagesAll Combinedashish kumarNo ratings yet
- Chapter 2 Trigonometric HeightingDocument22 pagesChapter 2 Trigonometric HeightingMuhdFikriNo ratings yet
- Dark Ages Script PDFDocument75 pagesDark Ages Script PDFgarfacio30No ratings yet
- Calculation of Navigational Parameters IN Meridian, Equator AND Parallel Sailing BY Means OF Relative Coordinates AND Correlation FactorsDocument7 pagesCalculation of Navigational Parameters IN Meridian, Equator AND Parallel Sailing BY Means OF Relative Coordinates AND Correlation FactorsDuje BogdanovićNo ratings yet
- Dilution of PrecisionDocument5 pagesDilution of PrecisionEEpro808No ratings yet
- Reflection Coefficients: For A Downward Travelling P Wave, For The Most General CaseDocument27 pagesReflection Coefficients: For A Downward Travelling P Wave, For The Most General CaseshantanurilNo ratings yet
- JS Atomic Lecture5 6Document11 pagesJS Atomic Lecture5 6Daniel MiculaNo ratings yet
- GNSS Surveying,: GPS Error-2Document50 pagesGNSS Surveying,: GPS Error-2ciprian preda100% (1)
- Migration&Pstm LKDocument75 pagesMigration&Pstm LKPallav KumarNo ratings yet
- NAV 224 PPT Semi Final Week 1 2Document60 pagesNAV 224 PPT Semi Final Week 1 2Jethro Lars UmbaoNo ratings yet
- Redshift and Energy ConservationDocument22 pagesRedshift and Energy ConservationqwertyNo ratings yet
- SVG - Topic 9 - Traverse AdjustmentDocument13 pagesSVG - Topic 9 - Traverse Adjustmentsilver dustNo ratings yet
- Reciprocal Leveling: Report TitleDocument13 pagesReciprocal Leveling: Report TitleDaneal Sofi0% (1)
- The Bedford Level Experiment ExplainedDocument7 pagesThe Bedford Level Experiment ExplainedPeter AllisonNo ratings yet
- Dispersion of Light - Prism - SpectroDocument4 pagesDispersion of Light - Prism - SpectroDR.P.V.Kanaka RaoNo ratings yet
- 02 EllipsometryDocument14 pages02 EllipsometryAndrew HendershotNo ratings yet
- Bode Plots (Note) PDFDocument5 pagesBode Plots (Note) PDFTejaswi J DamerlaNo ratings yet
- Physics 430: Lecture 19 Kepler Orbits: Dale E. GaryDocument12 pagesPhysics 430: Lecture 19 Kepler Orbits: Dale E. GaryZairNo ratings yet
- Third-order PLL: Phase detector Loop Filter F(s) VCO φ (t) φ (t) Phase detector Loop Filter F(s) VCO φ (t) φ (t)Document18 pagesThird-order PLL: Phase detector Loop Filter F(s) VCO φ (t) φ (t) Phase detector Loop Filter F(s) VCO φ (t) φ (t)How Hwan WongNo ratings yet
- Brachistochrone Problem Inside The Earth Revisited: Motohiko SaitohDocument4 pagesBrachistochrone Problem Inside The Earth Revisited: Motohiko SaitohFlor Hernandez TiscareñoNo ratings yet
- L13 WavesAndRaysII PDFDocument11 pagesL13 WavesAndRaysII PDFSugeng KurniawanNo ratings yet
- BPhO 2020 MSDocument8 pagesBPhO 2020 MSnadiaNo ratings yet
- Chapter 16 - Navigational ErrorsDocument4 pagesChapter 16 - Navigational ErrorsslavkovitlovNo ratings yet
- Poincare ToulouseDocument32 pagesPoincare ToulouseAkram BelayadiNo ratings yet
- Experiment To Test Absolute Motion 3 FINAL1Document7 pagesExperiment To Test Absolute Motion 3 FINAL1Henok TadesseNo ratings yet
- Crankshaft Conecting RodDocument6 pagesCrankshaft Conecting RodMuhammad Farhan Bin SukorNo ratings yet
- Chapter 13 - Mercator Charts and Plotting SheetsDocument3 pagesChapter 13 - Mercator Charts and Plotting SheetsslavkovitlovNo ratings yet
- Chapter 12 - The SailingsDocument22 pagesChapter 12 - The SailingsEmerito ZamoraNo ratings yet
- A Summary of AVO and Inversion TechniquesDocument69 pagesA Summary of AVO and Inversion TechniquesriyadiNo ratings yet
- Progress in Electromagnetics Research Letters, Vol. 10, 77-86, 2009Document10 pagesProgress in Electromagnetics Research Letters, Vol. 10, 77-86, 2009Abdul Razzaq FarooqiNo ratings yet
- White WlDocument96 pagesWhite WlcalvinNo ratings yet
- Superluminal Motion and Doppler BoostingDocument21 pagesSuperluminal Motion and Doppler BoostingRohith ShashankNo ratings yet
- Intensities Factors: AccomDocument6 pagesIntensities Factors: Accomehagar60No ratings yet
- EE309 Notes 20 PDFDocument3 pagesEE309 Notes 20 PDFHassan FarssiNo ratings yet
- A Survey of Clear Air Turbulence and Its Effect On "Seeing": B. Roy Frieden July 2, 2001Document24 pagesA Survey of Clear Air Turbulence and Its Effect On "Seeing": B. Roy Frieden July 2, 2001kicker911No ratings yet
- Al Khateb2016Document8 pagesAl Khateb2016NiteshNo ratings yet
- Chapter 6 - Methods For Latitude and Longitude MeasurementsDocument11 pagesChapter 6 - Methods For Latitude and Longitude MeasurementsslavkovitlovNo ratings yet
- Alghero Kalnay4 EnKFclassDocument24 pagesAlghero Kalnay4 EnKFclassBaoNo ratings yet
- The Motion of The Observer in Celestial NavigationDocument5 pagesThe Motion of The Observer in Celestial NavigationSandunMigaraNo ratings yet
- Performance of Hybrid Occulters Using Apodized Pupil Lyot CoronagraphyDocument7 pagesPerformance of Hybrid Occulters Using Apodized Pupil Lyot CoronagraphyBubu BibuNo ratings yet
- Unit 3 - Control Systems - WWW - Rgpvnotes.inDocument11 pagesUnit 3 - Control Systems - WWW - Rgpvnotes.inpeacepalharshNo ratings yet
- Lecture#3, Differential Level ErrorsDocument11 pagesLecture#3, Differential Level ErrorsMohammed Fadhil HamaNo ratings yet
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsFrom EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo ratings yet
- Effect of WindDocument11 pagesEffect of WindHarikrishnaNo ratings yet
- (Flfra/trf, Q': FTR Ifcr (Document3 pages(Flfra/trf, Q': FTR Ifcr (HarikrishnaNo ratings yet
- Transverse ThrustDocument5 pagesTransverse ThrustHarikrishnaNo ratings yet
- Pivot PointDocument3 pagesPivot PointHarikrishnaNo ratings yet
- 02 History & Future of Container ShipsDocument8 pages02 History & Future of Container ShipsHarikrishnaNo ratings yet
- Ffiffi, A-Ffi E: O : +rfirorpqtqnuqDocument63 pagesFfiffi, A-Ffi E: O : +rfirorpqtqnuqHarikrishnaNo ratings yet
- 202112150445245849959extrafirstclassnotice 15 12 21Document3 pages202112150445245849959extrafirstclassnotice 15 12 21HarikrishnaNo ratings yet
- 01 Introduction To Container ShipsDocument9 pages01 Introduction To Container ShipsHarikrishnaNo ratings yet
- SR.N O Name of Active Msvs Ais Make / Number Registration No. Details of DatDocument16 pagesSR.N O Name of Active Msvs Ais Make / Number Registration No. Details of DatHarikrishnaNo ratings yet
- R - d3.Rs: Vacancy CircularDocument11 pagesR - d3.Rs: Vacancy CircularHarikrishnaNo ratings yet
- NTExam Circular No 04 of 2021 Clarificationregardingmedicalfitnesscertificateforupgradationandrevalidationof COPand COCDocument1 pageNTExam Circular No 04 of 2021 Clarificationregardingmedicalfitnesscertificateforupgradationandrevalidationof COPand COCHarikrishnaNo ratings yet
- Charts NavigationDocument72 pagesCharts NavigationHarikrishnaNo ratings yet
- Vacancy Circular: 10 As OnDocument12 pagesVacancy Circular: 10 As OnHarikrishnaNo ratings yet
- Exit ExamsDocument2 pagesExit ExamsHarikrishnaNo ratings yet
- Operation and Service Manual For Hermetic Utimeter Rtex: MMC AdaptorsDocument62 pagesOperation and Service Manual For Hermetic Utimeter Rtex: MMC AdaptorsHarikrishnaNo ratings yet
- 38681bos28185 SM cp4Document65 pages38681bos28185 SM cp4HarikrishnaNo ratings yet
- Masthead Light: Lights and ShapesDocument16 pagesMasthead Light: Lights and ShapesHarikrishnaNo ratings yet
- Preparation For An AuditDocument37 pagesPreparation For An AuditHarikrishnaNo ratings yet
- Basic Concepts Internal ControlDocument31 pagesBasic Concepts Internal ControlHarikrishnaNo ratings yet
- Verification of Assets and Liabilities: Basic ConceptsDocument59 pagesVerification of Assets and Liabilities: Basic ConceptsHarikrishnaNo ratings yet
- The Company Audit - II: © The Institute of Chartered Accountants of IndiaDocument35 pagesThe Company Audit - II: © The Institute of Chartered Accountants of IndiaHarikrishnaNo ratings yet
- Software Engineering. Specification, Implementation, VerificationDocument186 pagesSoftware Engineering. Specification, Implementation, Verificationazariel.rodrigo100% (1)
- EXAM COG-622: IBM Cognos 10 BI AdministratorDocument16 pagesEXAM COG-622: IBM Cognos 10 BI AdministratorSaptarshi Dey0% (1)
- Law Enforcement Agency Indentifiers Crosswalk, 2012Document23 pagesLaw Enforcement Agency Indentifiers Crosswalk, 2012Samuel KaminNo ratings yet
- GEO01 - CO1.2 - Introduction To Earth Science (Geology)Document14 pagesGEO01 - CO1.2 - Introduction To Earth Science (Geology)Ghia PalarcaNo ratings yet
- Summary 2Document2 pagesSummary 2Admin OfficeNo ratings yet
- Forms PensionersDocument15 pagesForms PensionersAnimesh DasNo ratings yet
- Jadwal Pertandingan Liga Inggris 2009-2010Document11 pagesJadwal Pertandingan Liga Inggris 2009-2010Adjie SatryoNo ratings yet
- In-Band Full-Duplex Interference For Underwater Acoustic Communication SystemsDocument6 pagesIn-Band Full-Duplex Interference For Underwater Acoustic Communication SystemsHarris TsimenidisNo ratings yet
- Alarm Security Pic - Google ShoppingDocument1 pageAlarm Security Pic - Google Shoppingleeleeleebc123No ratings yet
- Cvp-Analysis AbsvarcostingDocument13 pagesCvp-Analysis AbsvarcostingGwy PagdilaoNo ratings yet
- In Re Plagiarism Case Against Justice Del CastilloDocument112 pagesIn Re Plagiarism Case Against Justice Del CastilloRaffyLaguesmaNo ratings yet
- Nursing Care PlanDocument4 pagesNursing Care PlanPutra AginaNo ratings yet
- Name:-Muhammad Shabbir Roll No. 508194950Document11 pagesName:-Muhammad Shabbir Roll No. 508194950Muhammad ShabbirNo ratings yet
- BlueStack Platform Marketing PlanDocument10 pagesBlueStack Platform Marketing PlanFıratcan KütükNo ratings yet
- The Ezekiel Cycle of 500 YearsDocument1 pageThe Ezekiel Cycle of 500 YearsOtis Arms100% (1)
- GDPR ReportDocument84 pagesGDPR ReportKingPlaysNo ratings yet
- Lesson Plan 8 (September) (AutoRecovered) 1Document3 pagesLesson Plan 8 (September) (AutoRecovered) 1Rutchie AbantoNo ratings yet
- Tuyển Sinh 10 - đề 1 -KeyDocument5 pagesTuyển Sinh 10 - đề 1 -Keynguyenhoang17042004No ratings yet
- MC&OB Unit 4Document17 pagesMC&OB Unit 4Tanya MalviyaNo ratings yet
- Dialogic DSI Signaling Servers: SIU Mode User ManualDocument304 pagesDialogic DSI Signaling Servers: SIU Mode User ManualAdiansyah Rama67% (3)
- Sensorless BLDCControl S08 MP16Document52 pagesSensorless BLDCControl S08 MP16Sachin PatilNo ratings yet
- Teachers' Interview PDFDocument38 pagesTeachers' Interview PDFlalitNo ratings yet
- Research PaperDocument7 pagesResearch PaperHazirah AmniNo ratings yet
- Elrc 4507 Unit PlanDocument4 pagesElrc 4507 Unit Planapi-284973023No ratings yet
- 3) 2013 March - The Thing About Ms. Hollis MaynellDocument23 pages3) 2013 March - The Thing About Ms. Hollis MaynellShy TolentinoNo ratings yet
- sn74hct138 PDFDocument21 pagessn74hct138 PDFpabloNo ratings yet
- ManualeDelphi IngleseDocument86 pagesManualeDelphi IngleseoxooxooxoNo ratings yet
- Simatic S7 Mpi Direct DriverDocument50 pagesSimatic S7 Mpi Direct Drivernilton_bertoldoNo ratings yet
- TakeawayDocument6 pagesTakeawayWilman VasquezNo ratings yet
- Form 137Document2 pagesForm 137Raymund BondeNo ratings yet