Download as pdf or txt
You might also like
- John Bird Published by Taylor and FrancisDocument9 pagesJohn Bird Published by Taylor and FrancisromwamaNo ratings yet
- 2marks Unit I Introduction and Chain SurveyingDocument67 pages2marks Unit I Introduction and Chain SurveyingAshwin RNo ratings yet
- Experiment 9: Isolation and Isomerization of Lycopene From Tomato Paste Date Performed: 6 Feb 2014 Date Submitted: 11 Feb 2014Document6 pagesExperiment 9: Isolation and Isomerization of Lycopene From Tomato Paste Date Performed: 6 Feb 2014 Date Submitted: 11 Feb 2014Haida HamidNo ratings yet
- Physics IADocument3 pagesPhysics IAdarren boesonoNo ratings yet
- Ge8292 Rejinpaul Iq April May 2019 PDFDocument8 pagesGe8292 Rejinpaul Iq April May 2019 PDFThamizh gomathiNo ratings yet
- Statics of Rigid Bodies ICDocument1 pageStatics of Rigid Bodies ICOne Less than TwiceNo ratings yet
- PSAD 1 - Part 1Document3 pagesPSAD 1 - Part 1John Gavin CarmenNo ratings yet
- Tutorial 2Document3 pagesTutorial 2PEDRO XD LASOANo ratings yet
- Practise Problems Set01Document7 pagesPractise Problems Set01rohit kumarNo ratings yet
- Tutorial 3Document2 pagesTutorial 3deetosh22No ratings yet
- Tutorial Topic 1Document4 pagesTutorial Topic 1aidaNo ratings yet
- GE6253-Engineering Mechanics Qustion BankDocument20 pagesGE6253-Engineering Mechanics Qustion Banknanthakumar91100% (1)
- Engineering Mechanics-4Document3 pagesEngineering Mechanics-4Nikhitha ThommandruNo ratings yet
- Assignment 1Document2 pagesAssignment 1Sai SujanNo ratings yet
- Tutorial 3Document2 pagesTutorial 3piyush kumarNo ratings yet
- C Nsa192004 Pages:4Document4 pagesC Nsa192004 Pages:4TMX PoketooNo ratings yet
- SRB DRBDocument44 pagesSRB DRBAcads AccountNo ratings yet
- Strema 101Document4 pagesStrema 101Hazel VidallonNo ratings yet
- Free Body DiagramsDocument10 pagesFree Body Diagramsatif irshadNo ratings yet
- Midterm Exam Answer KeyDocument6 pagesMidterm Exam Answer KeyFiel Ericson SolaresNo ratings yet
- (TOLIPIZZLE) Rigid Bodies in Three DimensionsDocument38 pages(TOLIPIZZLE) Rigid Bodies in Three DimensionsPace20No ratings yet
- Question BankDocument9 pagesQuestion Bankpragash100% (1)
- AsdDocument10 pagesAsdsalman khanNo ratings yet
- Assignment-2 - Engg Mech PDFDocument8 pagesAssignment-2 - Engg Mech PDFNiteshNo ratings yet
- EM QBDocument16 pagesEM QBJeganNo ratings yet
- 12 MarksDocument23 pages12 Markslakshmigsr6610No ratings yet
- Question Bank & Bit BankDocument20 pagesQuestion Bank & Bit BankKomma HemaNo ratings yet
- Assignment Questions For All UnitsDocument10 pagesAssignment Questions For All UnitsPiyush BhandariNo ratings yet
- EM Question BankDocument14 pagesEM Question BanksambannisNo ratings yet
- Model QSTN Paper 1-Be100Document5 pagesModel QSTN Paper 1-Be100nanduNo ratings yet
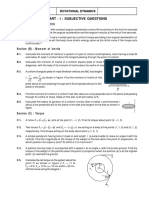
- Subjective Questions: Rigid Body DynamicsDocument11 pagesSubjective Questions: Rigid Body DynamicsDhruv Jyot SinghNo ratings yet
- Practice ProblemDocument6 pagesPractice ProblemVikrant SharmaNo ratings yet
- Refresher Module 45 Nov 2021Document1 pageRefresher Module 45 Nov 2021John andre MarianoNo ratings yet
- BankDocument8 pagesBanktjpkNo ratings yet
- QB18 PDFDocument10 pagesQB18 PDFRaNo ratings yet
- Engineering MechanicsDocument8 pagesEngineering MechanicsUgender SingarapuNo ratings yet
- Engineering Mechanics Part B Part C QuestionsDocument38 pagesEngineering Mechanics Part B Part C QuestionskganesanNo ratings yet
- Part-1: Subjective Questions: KinematicsDocument27 pagesPart-1: Subjective Questions: KinematicsB AbhinavNo ratings yet
- Engineering MechanicsDocument18 pagesEngineering MechanicsSiva ChidambaramNo ratings yet
- Engineering MechanicsDocument37 pagesEngineering Mechanicser_paramjeetgillNo ratings yet
- Answer All Questions, Each Carries 5 Marks.: Pages: 2 Reg No.: - NameDocument2 pagesAnswer All Questions, Each Carries 5 Marks.: Pages: 2 Reg No.: - NameSibin SamNo ratings yet
- IAT 1 Engineering Mechanics Question and KeyDocument7 pagesIAT 1 Engineering Mechanics Question and KeyAnonymous RJfsy8PtNo ratings yet
- Btes103 203 em QBDocument10 pagesBtes103 203 em QBSurajNo ratings yet
- Equilibrium of Force SystemsDocument14 pagesEquilibrium of Force SystemsRocel Marie Lopez100% (1)
- Assignment 1Document9 pagesAssignment 1subash shrestha0% (1)
- Dynamics (Kinetics)Document2 pagesDynamics (Kinetics)HeliosNo ratings yet
- Tutorial 1 Engg. Mechanics-2021 Batch PDFDocument3 pagesTutorial 1 Engg. Mechanics-2021 Batch PDFARJUN NARAYANAN 21BAS10008No ratings yet
- 06 - Angular Momentum - ExerciseDocument19 pages06 - Angular Momentum - Exercisekenchan0810.kcNo ratings yet
- F.A.L. Conducive Engineering Review CenterDocument3 pagesF.A.L. Conducive Engineering Review CenterAve de GuzmanNo ratings yet
- Practise Problems Set05Document8 pagesPractise Problems Set05rohit kumarNo ratings yet
- TOSDocument1 pageTOSsteven bianesNo ratings yet
- CPP1 RotationaldynamicsDocument14 pagesCPP1 RotationaldynamicsBNo ratings yet
- r05010302 Engineering MechanicsDocument11 pagesr05010302 Engineering MechanicsSRINIVASA RAO GANTANo ratings yet
- O level Physics Questions And Answer Practice Papers 2From EverandO level Physics Questions And Answer Practice Papers 2Rating: 5 out of 5 stars5/5 (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Intensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleFrom EverandIntensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleNo ratings yet
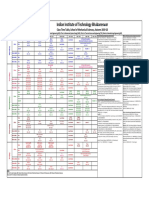
- Indian Institute of Technology Bhubaneswar: Class Time Table, School of Mechanical Sciences, Autumn 2019 20Document1 pageIndian Institute of Technology Bhubaneswar: Class Time Table, School of Mechanical Sciences, Autumn 2019 20pravat DashNo ratings yet
- Curriculum For B. Tech. (Mechanical Engineering) 3rd Sem To 8th SemDocument3 pagesCurriculum For B. Tech. (Mechanical Engineering) 3rd Sem To 8th Sempravat DashNo ratings yet
- Aits Part Test - II (Jee Main)Document5 pagesAits Part Test - II (Jee Main)pravat DashNo ratings yet
- Health RecordDocument3 pagesHealth Recordpravat DashNo ratings yet
- 1544162899Document3 pages1544162899pravat DashNo ratings yet
- National Standard Examination in Chemistry (Nsec) 2018-19: Indian Association of Physics TeachersDocument1 pageNational Standard Examination in Chemistry (Nsec) 2018-19: Indian Association of Physics Teacherspravat DashNo ratings yet
- Class Xii Aiits 5 ResultDocument2 pagesClass Xii Aiits 5 Resultpravat DashNo ratings yet
- Aits Jee 2019 Advanced Part Test-II Result Test Date 18-11-2018Document7 pagesAits Jee 2019 Advanced Part Test-II Result Test Date 18-11-2018pravat DashNo ratings yet
- CAMX2015-Composite Design and AnalysisDocument86 pagesCAMX2015-Composite Design and AnalysisSabanSaulicNo ratings yet
- Sterilization by FiltrationDocument22 pagesSterilization by Filtrationshahbaz aliNo ratings yet
- Organic Hydronium-Ion Battery With Ultralong LifeDocument7 pagesOrganic Hydronium-Ion Battery With Ultralong LifeNoisy RequiemNo ratings yet
- Curing Characteristics of Low Emission Urea-Formaldehyde Adhesive in The Presence of WoodDocument13 pagesCuring Characteristics of Low Emission Urea-Formaldehyde Adhesive in The Presence of WoodNam Phạm VănNo ratings yet
- Tarea de SinusoidalesDocument2 pagesTarea de SinusoidalesRodrigo Nicolas VALENCIA VARGASNo ratings yet
- Questions & Answers - Ultrasonic Instrument Characterizations Level 2Document6 pagesQuestions & Answers - Ultrasonic Instrument Characterizations Level 2Sathishkumar Srinivasan100% (2)
- Properties of SolutionsDocument18 pagesProperties of SolutionsstineNo ratings yet
- Thin Walls To Ext PressDocument15 pagesThin Walls To Ext PresssyampnaiduNo ratings yet
- Refrigeration and Air ConditioningDocument6 pagesRefrigeration and Air ConditioningIbrahim HossainNo ratings yet
- Related Topics: TEP Specific Charge of The ElectronDocument4 pagesRelated Topics: TEP Specific Charge of The ElectronAlexandraFlorentynaNo ratings yet
- Induction VAV Air Volume Control - 2011161523443Document16 pagesInduction VAV Air Volume Control - 2011161523443Harish MenonNo ratings yet
- 01 Process Design Fundamental of DistillationDocument42 pages01 Process Design Fundamental of DistillationIyan MaulanaNo ratings yet
- 15-Bertolini Diaphragm PumpDocument41 pages15-Bertolini Diaphragm PumpJohn Robinson100% (2)
- Che 411A: Fluid Mechanics: Sourc E TopicDocument24 pagesChe 411A: Fluid Mechanics: Sourc E TopicChristine Mae Vea100% (1)
- States of Matter - Solutions and MixturesDocument25 pagesStates of Matter - Solutions and MixturesYasinth ThivagarNo ratings yet
- Scalgun BDocument2 pagesScalgun Bdevadoss kishoreNo ratings yet
- Deaerator ConstructionDocument23 pagesDeaerator ConstructionRakshit Lobin100% (1)
- Free GK Study Material - Global Warming and Temperature Change Based For Competitive ExamsDocument9 pagesFree GK Study Material - Global Warming and Temperature Change Based For Competitive ExamsDishapublicationNo ratings yet
- 8) Copper & Copper Alloy SpecificationsDocument3 pages8) Copper & Copper Alloy Specificationsnavas1972No ratings yet
- LN SafetyDocument2 pagesLN SafetyIrfan KhanNo ratings yet
- Exhanger Leakages in VDU - ModifiedDocument14 pagesExhanger Leakages in VDU - ModifiedJay LawsonNo ratings yet
- PNNL Scorecard Prototypes Office SmallDocument20 pagesPNNL Scorecard Prototypes Office SmallNaveen BansalNo ratings yet
- IndxDocument13 pagesIndxsantosh07591A2129No ratings yet
- Detailed Lesson Plan in Science 8 - Group 2Document6 pagesDetailed Lesson Plan in Science 8 - Group 2Christian Pasuquin91% (22)
- Electrochemistry 4Document33 pagesElectrochemistry 4NITYANSH PANDEYNo ratings yet
- Identification of Structures From Powder X-Ray Diffraction DataDocument4 pagesIdentification of Structures From Powder X-Ray Diffraction DataCarla ParraNo ratings yet