
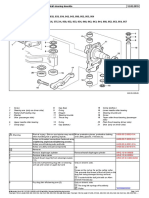
Steering Wheel Angle Sensor (SAS), Component Description
Steering Wheel Angle Sensor (SAS), Component Description
You might also like
- Drive Control (CPC) Control Unit, Component DescriptionDocument2 pagesDrive Control (CPC) Control Unit, Component Descriptionrudi100% (1)
- ElectricDocument19 pagesElectricSumit Edward67% (3)
- Man d0834 d0836 Spec Sheet p1jpgDocument6 pagesMan d0834 d0836 Spec Sheet p1jpgDavid Mayahua OrtegaNo ratings yet
- Driver Assistance System Control Unit (VRDU), Component DescriptionDocument2 pagesDriver Assistance System Control Unit (VRDU), Component Descriptionrudi100% (1)
- SPN FMI Fault Region Fault Reaction Fault Description Remedy Ecas Can2 DTC ListDocument6 pagesSPN FMI Fault Region Fault Reaction Fault Description Remedy Ecas Can2 DTC Listxaime166100% (1)
- Product Data Sheet ServotwinDocument2 pagesProduct Data Sheet Servotwinurl295100% (1)
- FR GR Engines Infosheet enDocument4 pagesFR GR Engines Infosheet enAbdo FreedomNo ratings yet
- Wiring Diagram HeaterDocument8 pagesWiring Diagram HeaterDedi AlfhayetNo ratings yet
- Equilizer p410Document5 pagesEquilizer p410lilik sukristiantoNo ratings yet
- Electrohydraulic Power Steering (APS) Control Unit, Component DescriptionDocument1 pageElectrohydraulic Power Steering (APS) Control Unit, Component DescriptionrudiNo ratings yet
- Install Steering KnuckleDocument5 pagesInstall Steering KnucklerudiNo ratings yet
- Set Valve ClearanceDocument3 pagesSet Valve ClearancerudiNo ratings yet
- Electrohydraulic Power Steering (APS) Control Unit, Component DescriptionDocument1 pageElectrohydraulic Power Steering (APS) Control Unit, Component DescriptionrudiNo ratings yet
- Modular Switch Panel Control Unit (MSF), Component DescriptionDocument2 pagesModular Switch Panel Control Unit (MSF), Component Descriptionrudi100% (2)
- Component Description For Transmission Control (TCM) Control UnitDocument1 pageComponent Description For Transmission Control (TCM) Control UnitrudiNo ratings yet
- Level Control (CLCS) Control Unit, Component DescriptionDocument1 pageLevel Control (CLCS) Control Unit, Component DescriptionrudiNo ratings yet
- Actros 4043kDocument14 pagesActros 4043krudi100% (1)
- Actros 3336 SDocument13 pagesActros 3336 SrudiNo ratings yet
- Actros 3939 K 6x4 39 (Full Spec.)Document14 pagesActros 3939 K 6x4 39 (Full Spec.)rudi80% (5)
- Mts Silentflo 515 Hydraulic Power Units - Compact: Clean Quiet, and Reliable Power GenerationDocument8 pagesMts Silentflo 515 Hydraulic Power Units - Compact: Clean Quiet, and Reliable Power GenerationpeterNo ratings yet
- Auxiliary Steering Axle (ASA) Control Unit, Component DescriptionDocument2 pagesAuxiliary Steering Axle (ASA) Control Unit, Component DescriptionrudiNo ratings yet
- Remove - Install Front Module (FM) PDFDocument2 pagesRemove - Install Front Module (FM) PDFJohn Michael SantosNo ratings yet
- Current Fault Codes: Code Text StatusDocument5 pagesCurrent Fault Codes: Code Text Statusedinansyah balingNo ratings yet
- Mercedes Benz Actros 2031 S SpecificationsDocument13 pagesMercedes Benz Actros 2031 S Specificationskouaplack augustin davidNo ratings yet
- Current Fault Codes: Code Text StatusDocument4 pagesCurrent Fault Codes: Code Text StatusnaftaliNo ratings yet
- TEXA Motor Trucks v19.0.0 EngDocument289 pagesTEXA Motor Trucks v19.0.0 EngBombonica1984100% (1)
- B57, B99: Speed Sensors: Figure LegendDocument1 pageB57, B99: Speed Sensors: Figure Legendjose breno vieira silvaNo ratings yet
- Wiring Diagram of Data Link Connector1Document9 pagesWiring Diagram of Data Link Connector1Marco Mondini100% (1)
- Basic Function Control Unit Front Module (FM)Document9 pagesBasic Function Control Unit Front Module (FM)Eko Budi Sky100% (1)
- Volvo B8R EU6 Data-Sheet 13 03Document3 pagesVolvo B8R EU6 Data-Sheet 13 03vahladianNo ratings yet
- Neos 100Document34 pagesNeos 100David Bustamante ReyNo ratings yet
- 07E-1 TraXon XLRAEM4100G211062Document1 page07E-1 TraXon XLRAEM4100G211062Dtl DiagNo ratings yet
- Battery Disconnect Switch Control Unit, Component DescriptionDocument2 pagesBattery Disconnect Switch Control Unit, Component Descriptionrudi100% (3)
- 1743 LKWActrosXXXXXX 954frDocument4 pages1743 LKWActrosXXXXXX 954frgeothermal3102100% (1)
- enDocument23 pagesenuser100% (3)
- Cab Sensor and Actuator Module (SCA), Component DescriptionDocument1 pageCab Sensor and Actuator Module (SCA), Component DescriptionrudiNo ratings yet
- Fault Code List For Drive Control (FR) Control UnitDocument6 pagesFault Code List For Drive Control (FR) Control UnitSTO UAndriivNo ratings yet
- Spare Parts Catalog: 16 S 151 IT Material Number: 1315.041.719 Current Date: 29.10.2013Document94 pagesSpare Parts Catalog: 16 S 151 IT Material Number: 1315.041.719 Current Date: 29.10.2013Муслим КадралиевNo ratings yet
- MANWIS - XSLT - Body Acelerator PedalDocument6 pagesMANWIS - XSLT - Body Acelerator PedalaliNo ratings yet
- P11X24EN Scania Opticruise and Retarder Tcm40 280864Document6 pagesP11X24EN Scania Opticruise and Retarder Tcm40 280864Ionut LefterNo ratings yet
- Actros 190627Document72 pagesActros 190627Ali AlhaidarNo ratings yet
- New Actros DashDocument6 pagesNew Actros Dashlesly katherine gutierrez guevara100% (1)
- SCANIA - Trucks, Tractor & Forklift Manual PDFDocument16 pagesSCANIA - Trucks, Tractor & Forklift Manual PDFAbcNo ratings yet
- Actros WS SystemDocument43 pagesActros WS Systemabdulrahman elsaiedNo ratings yet
- ZF-WSK: Failure Effect List - Tctronic STDDocument59 pagesZF-WSK: Failure Effect List - Tctronic STDJulioRamirez100% (1)
- Iveco StralisDocument1 pageIveco Stralisdejanflojd100% (2)
- Specification Sheet: FTT 6X4 TractorDocument4 pagesSpecification Sheet: FTT 6X4 TractorAgnaldo CaetanoNo ratings yet
- GS DescDocument4 pagesGS DescCostel CaramanNo ratings yet
- EBS Raid: System and Functional DescriptionDocument40 pagesEBS Raid: System and Functional DescriptionraidhemedNo ratings yet
- Error Code AxorDocument29 pagesError Code Axordp.plantdeptNo ratings yet
- TGX 6x2 Midlift Tractor: Chassis SpecificationDocument4 pagesTGX 6x2 Midlift Tractor: Chassis SpecificationDarNo ratings yet
- ScaniaPartsSolutions2020Brochure A5 V13Document21 pagesScaniaPartsSolutions2020Brochure A5 V13கோவி கோபால் ஆர்ட்ஸ்No ratings yet
- EAS-3 Epa mx13Document2 pagesEAS-3 Epa mx13Robles JmrNo ratings yet
- Mercedes Actross BS Pin AssignmentDocument2 pagesMercedes Actross BS Pin AssignmentIslam MustafaNo ratings yet
- Product: Tebs G2Document30 pagesProduct: Tebs G2ruman214No ratings yet
- BBG201122ENDocument438 pagesBBG201122ENLja CsaNo ratings yet
- Obd II Trouble CodesDocument9 pagesObd II Trouble CodesSimonick Seta BarjeanNo ratings yet
- Component Description For Single Signal Acquisition and Actuation Module (SSAM) Control UnitDocument1 pageComponent Description For Single Signal Acquisition and Actuation Module (SSAM) Control UnitrudiNo ratings yet
- Arocs Genearal InformationDocument55 pagesArocs Genearal InformationAhmad NawawiNo ratings yet
- Fault Code List For Engine Control (MR) 1Document3 pagesFault Code List For Engine Control (MR) 1UGINo ratings yet
- Bagi 'CPC - PDF'Document4 pagesBagi 'CPC - PDF'Syarifuddin RahmanNo ratings yet
- K360 IB4 X 2Document2 pagesK360 IB4 X 2Jason FilbertNo ratings yet
- Bodybuilder Module, Fault CodesDocument2 pagesBodybuilder Module, Fault CodesIzz Bahar100% (1)
- EAM127-24 - Interface Com S6 Scania PDFDocument2 pagesEAM127-24 - Interface Com S6 Scania PDFthyagoenergNo ratings yet
- The Star Truck With The Star Logo: Mercedes-Benz Genuine Accessories For The ActrosDocument44 pagesThe Star Truck With The Star Logo: Mercedes-Benz Genuine Accessories For The ActrosJose Ivan Rios OrjuelaNo ratings yet
- MR Fault CodeDocument17 pagesMR Fault Codeptsi rekrutNo ratings yet
- Mercedes Powershift Brochure: Experiences and Tips From Driving Experience For The Service AreaDocument11 pagesMercedes Powershift Brochure: Experiences and Tips From Driving Experience For The Service AreaMohamed AlaaNo ratings yet
- Directions Scania XPI DC16 102Document124 pagesDirections Scania XPI DC16 102khaledshekh133No ratings yet
- Install Front Axle Steering Angle Sensor at Steering GearDocument5 pagesInstall Front Axle Steering Angle Sensor at Steering GearAbi JithNo ratings yet
- Vag Option Codes PDFDocument261 pagesVag Option Codes PDFDinuBalanNo ratings yet
- Bw10235pc-Feb14 JTF CamcrankshaftDocument1 pageBw10235pc-Feb14 JTF CamcrankshaftRaulNo ratings yet
- Model 956 With Engine 936.9 (Except 936.991) Model 963, 964, 967Document1 pageModel 956 With Engine 936.9 (Except 936.991) Model 963, 964, 967rudi100% (1)
- Lubricants For New Axor: Interval NO Operating Fluid Vehicle Type MB Oil Sheet CapacityDocument1 pageLubricants For New Axor: Interval NO Operating Fluid Vehicle Type MB Oil Sheet CapacityrudiNo ratings yet
- Assemble Rear Wheel HubDocument1 pageAssemble Rear Wheel HubrudiNo ratings yet
- Tightening Procedure For Oil Pan BoltsDocument1 pageTightening Procedure For Oil Pan BoltsrudiNo ratings yet
- Perform Major Teach-In Process On Control UnitDocument1 pagePerform Major Teach-In Process On Control UnitrudiNo ratings yet
- Lane Assistant Camera (SPA), Component DescriptionDocument1 pageLane Assistant Camera (SPA), Component DescriptionrudiNo ratings yet
- Remove - Install Cylinder Head CoverDocument1 pageRemove - Install Cylinder Head CoverrudiNo ratings yet
- Electronic Ignition Lock (EIS), Component DescriptionDocument2 pagesElectronic Ignition Lock (EIS), Component DescriptionrudiNo ratings yet
- Battery Disconnect Switch Control Unit, Component DescriptionDocument2 pagesBattery Disconnect Switch Control Unit, Component Descriptionrudi100% (3)
- Tire Pressure Monitor (TPM) Control Unit, Component DescriptionDocument1 pageTire Pressure Monitor (TPM) Control Unit, Component DescriptionrudiNo ratings yet
- PI Basic Information Actros SLTDocument36 pagesPI Basic Information Actros SLTrudi100% (1)
- Cab Sensor and Actuator Module (SCA), Component DescriptionDocument1 pageCab Sensor and Actuator Module (SCA), Component DescriptionrudiNo ratings yet
- Auxiliary Steering Axle (ASA) Control Unit, Component DescriptionDocument2 pagesAuxiliary Steering Axle (ASA) Control Unit, Component DescriptionrudiNo ratings yet
- ActrosDocument100 pagesActrosrudi93% (14)
- Frame Sensor and Actuator Module (SCH), Component Description PDFDocument1 pageFrame Sensor and Actuator Module (SCH), Component Description PDFrudiNo ratings yet
- Anti-Theft Alarm System (ATA) Control Unit, Component Description PDFDocument1 pageAnti-Theft Alarm System (ATA) Control Unit, Component Description PDFrudiNo ratings yet
- Component Description For Single Signal Acquisition and Actuation Module (SSAM) Control UnitDocument1 pageComponent Description For Single Signal Acquisition and Actuation Module (SSAM) Control UnitrudiNo ratings yet
- GF54.21-W-0009H Central Gateway (CGW) Control Unit, Component Description 12.04.2019Document1 pageGF54.21-W-0009H Central Gateway (CGW) Control Unit, Component Description 12.04.2019rudi100% (1)
- Standart Torque BoltDocument1 pageStandart Torque BoltrudiNo ratings yet
- Study of Mechanical and Electronic Properties Rare Earth IntermetallicsDocument11 pagesStudy of Mechanical and Electronic Properties Rare Earth IntermetallicsAnushree AnilNo ratings yet
- E-Line Pull Up & Dip Station: Installation SpecificationsDocument2 pagesE-Line Pull Up & Dip Station: Installation Specificationsw009No ratings yet
- 0208 DressingforsuccessDocument4 pages0208 DressingforsuccessNatKThNo ratings yet
- PDL 615 MSDDocument2 pagesPDL 615 MSDWalter DiazNo ratings yet
- Power Daily MINIBUS A50.13-ENGLISHDocument14 pagesPower Daily MINIBUS A50.13-ENGLISHadolfo pacoNo ratings yet
- To-HQ-02-073 Rev 00 Philosophy For Passive Fire Protection Systems - OnshoreDocument16 pagesTo-HQ-02-073 Rev 00 Philosophy For Passive Fire Protection Systems - OnshoreAHMED AMIRANo ratings yet
- Calculating Esal PDFDocument4 pagesCalculating Esal PDFAkua AlderNo ratings yet
- Test Method For Photovoltaic Module Ratings: Lynn, KevinDocument16 pagesTest Method For Photovoltaic Module Ratings: Lynn, KevinSonya ReddyNo ratings yet
- Wood Work Check ListDocument11 pagesWood Work Check ListbkgboqdraftsmanNo ratings yet
- Pro CT FantomDocument7 pagesPro CT FantomМилан ВучинићNo ratings yet
- Chapter 1 Introduction To ComputersDocument10 pagesChapter 1 Introduction To ComputersKate GuerreroNo ratings yet
- Qad Erp Solutions GuideDocument121 pagesQad Erp Solutions GuideLuis LezamaNo ratings yet
- United States Air Force Aircraft Accident Investigation Board ReportDocument37 pagesUnited States Air Force Aircraft Accident Investigation Board ReportKSNV News3LVNo ratings yet
- DBreeze Documentation ActualDocument133 pagesDBreeze Documentation ActualJackson HayesNo ratings yet
- LUMP MASS GoviDocument2 pagesLUMP MASS GoviSudip ShresthaNo ratings yet
- Process Control Assignment 2Document1 pageProcess Control Assignment 2Tanvir AhmedNo ratings yet
- Hydrodynamic Forces On Pipelines: Model Tests: M. B. Bryndum V. JacobsenDocument11 pagesHydrodynamic Forces On Pipelines: Model Tests: M. B. Bryndum V. JacobsenKumarJR86No ratings yet
- Credit Evaluation Process FlowDocument1 pageCredit Evaluation Process FlowAbby CifraNo ratings yet
- AVIONICS 16 Marks With AnsDocument32 pagesAVIONICS 16 Marks With Anssabari sabariNo ratings yet
- PZ3-Brinell-hardness PI E PDFDocument2 pagesPZ3-Brinell-hardness PI E PDFjimborenoNo ratings yet
- Inbound 4435889675498454681Document1 pageInbound 4435889675498454681keepersilent2No ratings yet
- Carnhill Design GuideDocument26 pagesCarnhill Design Guidenandodefaria100% (1)
- Concerns On Estimating Heat Release RateDocument9 pagesConcerns On Estimating Heat Release Rate1jess6No ratings yet
- 414CC3 Excel Template Prelim Shell and Tube Heat Exchanger Design Si UnitsDocument3 pages414CC3 Excel Template Prelim Shell and Tube Heat Exchanger Design Si UnitsGuruh Mehra MulyanaNo ratings yet
- 7-13-0001 Rev 6Document1 page7-13-0001 Rev 6cynideNo ratings yet
- Cebu City CIVIL STRUCTURAL PERMITfor Building PermitDocument2 pagesCebu City CIVIL STRUCTURAL PERMITfor Building PermitAudrey ChuaNo ratings yet
- Reviewer in Electricity and MagnetismDocument3 pagesReviewer in Electricity and MagnetismWayne David C. PadullonNo ratings yet
- Tar - 2011 - WoDocument3 pagesTar - 2011 - Wohamza brahmiNo ratings yet
- eTOM ModelDocument19 pageseTOM ModelzhadnanNo ratings yet

















































































































Download as pdf or txt
You might also like
- Drive Control (CPC) Control Unit, Component DescriptionDocument2 pagesDrive Control (CPC) Control Unit, Component Descriptionrudi100% (1)
- ElectricDocument19 pagesElectricSumit Edward67% (3)
- Man d0834 d0836 Spec Sheet p1jpgDocument6 pagesMan d0834 d0836 Spec Sheet p1jpgDavid Mayahua OrtegaNo ratings yet
- Driver Assistance System Control Unit (VRDU), Component DescriptionDocument2 pagesDriver Assistance System Control Unit (VRDU), Component Descriptionrudi100% (1)
- SPN FMI Fault Region Fault Reaction Fault Description Remedy Ecas Can2 DTC ListDocument6 pagesSPN FMI Fault Region Fault Reaction Fault Description Remedy Ecas Can2 DTC Listxaime166100% (1)
- Product Data Sheet ServotwinDocument2 pagesProduct Data Sheet Servotwinurl295100% (1)
- FR GR Engines Infosheet enDocument4 pagesFR GR Engines Infosheet enAbdo FreedomNo ratings yet
- Wiring Diagram HeaterDocument8 pagesWiring Diagram HeaterDedi AlfhayetNo ratings yet
- Equilizer p410Document5 pagesEquilizer p410lilik sukristiantoNo ratings yet
- Electrohydraulic Power Steering (APS) Control Unit, Component DescriptionDocument1 pageElectrohydraulic Power Steering (APS) Control Unit, Component DescriptionrudiNo ratings yet
- Install Steering KnuckleDocument5 pagesInstall Steering KnucklerudiNo ratings yet
- Set Valve ClearanceDocument3 pagesSet Valve ClearancerudiNo ratings yet
- Electrohydraulic Power Steering (APS) Control Unit, Component DescriptionDocument1 pageElectrohydraulic Power Steering (APS) Control Unit, Component DescriptionrudiNo ratings yet
- Modular Switch Panel Control Unit (MSF), Component DescriptionDocument2 pagesModular Switch Panel Control Unit (MSF), Component Descriptionrudi100% (2)
- Component Description For Transmission Control (TCM) Control UnitDocument1 pageComponent Description For Transmission Control (TCM) Control UnitrudiNo ratings yet
- Level Control (CLCS) Control Unit, Component DescriptionDocument1 pageLevel Control (CLCS) Control Unit, Component DescriptionrudiNo ratings yet
- Actros 4043kDocument14 pagesActros 4043krudi100% (1)
- Actros 3336 SDocument13 pagesActros 3336 SrudiNo ratings yet
- Actros 3939 K 6x4 39 (Full Spec.)Document14 pagesActros 3939 K 6x4 39 (Full Spec.)rudi80% (5)
- Mts Silentflo 515 Hydraulic Power Units - Compact: Clean Quiet, and Reliable Power GenerationDocument8 pagesMts Silentflo 515 Hydraulic Power Units - Compact: Clean Quiet, and Reliable Power GenerationpeterNo ratings yet
- Auxiliary Steering Axle (ASA) Control Unit, Component DescriptionDocument2 pagesAuxiliary Steering Axle (ASA) Control Unit, Component DescriptionrudiNo ratings yet
- Remove - Install Front Module (FM) PDFDocument2 pagesRemove - Install Front Module (FM) PDFJohn Michael SantosNo ratings yet
- Current Fault Codes: Code Text StatusDocument5 pagesCurrent Fault Codes: Code Text Statusedinansyah balingNo ratings yet
- Mercedes Benz Actros 2031 S SpecificationsDocument13 pagesMercedes Benz Actros 2031 S Specificationskouaplack augustin davidNo ratings yet
- Current Fault Codes: Code Text StatusDocument4 pagesCurrent Fault Codes: Code Text StatusnaftaliNo ratings yet
- TEXA Motor Trucks v19.0.0 EngDocument289 pagesTEXA Motor Trucks v19.0.0 EngBombonica1984100% (1)
- B57, B99: Speed Sensors: Figure LegendDocument1 pageB57, B99: Speed Sensors: Figure Legendjose breno vieira silvaNo ratings yet
- Wiring Diagram of Data Link Connector1Document9 pagesWiring Diagram of Data Link Connector1Marco Mondini100% (1)
- Basic Function Control Unit Front Module (FM)Document9 pagesBasic Function Control Unit Front Module (FM)Eko Budi Sky100% (1)
- Volvo B8R EU6 Data-Sheet 13 03Document3 pagesVolvo B8R EU6 Data-Sheet 13 03vahladianNo ratings yet
- Neos 100Document34 pagesNeos 100David Bustamante ReyNo ratings yet
- 07E-1 TraXon XLRAEM4100G211062Document1 page07E-1 TraXon XLRAEM4100G211062Dtl DiagNo ratings yet
- Battery Disconnect Switch Control Unit, Component DescriptionDocument2 pagesBattery Disconnect Switch Control Unit, Component Descriptionrudi100% (3)
- 1743 LKWActrosXXXXXX 954frDocument4 pages1743 LKWActrosXXXXXX 954frgeothermal3102100% (1)
- enDocument23 pagesenuser100% (3)
- Cab Sensor and Actuator Module (SCA), Component DescriptionDocument1 pageCab Sensor and Actuator Module (SCA), Component DescriptionrudiNo ratings yet
- Fault Code List For Drive Control (FR) Control UnitDocument6 pagesFault Code List For Drive Control (FR) Control UnitSTO UAndriivNo ratings yet
- Spare Parts Catalog: 16 S 151 IT Material Number: 1315.041.719 Current Date: 29.10.2013Document94 pagesSpare Parts Catalog: 16 S 151 IT Material Number: 1315.041.719 Current Date: 29.10.2013Муслим КадралиевNo ratings yet
- MANWIS - XSLT - Body Acelerator PedalDocument6 pagesMANWIS - XSLT - Body Acelerator PedalaliNo ratings yet
- P11X24EN Scania Opticruise and Retarder Tcm40 280864Document6 pagesP11X24EN Scania Opticruise and Retarder Tcm40 280864Ionut LefterNo ratings yet
- Actros 190627Document72 pagesActros 190627Ali AlhaidarNo ratings yet
- New Actros DashDocument6 pagesNew Actros Dashlesly katherine gutierrez guevara100% (1)
- SCANIA - Trucks, Tractor & Forklift Manual PDFDocument16 pagesSCANIA - Trucks, Tractor & Forklift Manual PDFAbcNo ratings yet
- Actros WS SystemDocument43 pagesActros WS Systemabdulrahman elsaiedNo ratings yet
- ZF-WSK: Failure Effect List - Tctronic STDDocument59 pagesZF-WSK: Failure Effect List - Tctronic STDJulioRamirez100% (1)
- Iveco StralisDocument1 pageIveco Stralisdejanflojd100% (2)
- Specification Sheet: FTT 6X4 TractorDocument4 pagesSpecification Sheet: FTT 6X4 TractorAgnaldo CaetanoNo ratings yet
- GS DescDocument4 pagesGS DescCostel CaramanNo ratings yet
- EBS Raid: System and Functional DescriptionDocument40 pagesEBS Raid: System and Functional DescriptionraidhemedNo ratings yet
- Error Code AxorDocument29 pagesError Code Axordp.plantdeptNo ratings yet
- TGX 6x2 Midlift Tractor: Chassis SpecificationDocument4 pagesTGX 6x2 Midlift Tractor: Chassis SpecificationDarNo ratings yet
- ScaniaPartsSolutions2020Brochure A5 V13Document21 pagesScaniaPartsSolutions2020Brochure A5 V13கோவி கோபால் ஆர்ட்ஸ்No ratings yet
- EAS-3 Epa mx13Document2 pagesEAS-3 Epa mx13Robles JmrNo ratings yet
- Mercedes Actross BS Pin AssignmentDocument2 pagesMercedes Actross BS Pin AssignmentIslam MustafaNo ratings yet
- Product: Tebs G2Document30 pagesProduct: Tebs G2ruman214No ratings yet
- BBG201122ENDocument438 pagesBBG201122ENLja CsaNo ratings yet
- Obd II Trouble CodesDocument9 pagesObd II Trouble CodesSimonick Seta BarjeanNo ratings yet
- Component Description For Single Signal Acquisition and Actuation Module (SSAM) Control UnitDocument1 pageComponent Description For Single Signal Acquisition and Actuation Module (SSAM) Control UnitrudiNo ratings yet
- Arocs Genearal InformationDocument55 pagesArocs Genearal InformationAhmad NawawiNo ratings yet
- Fault Code List For Engine Control (MR) 1Document3 pagesFault Code List For Engine Control (MR) 1UGINo ratings yet
- Bagi 'CPC - PDF'Document4 pagesBagi 'CPC - PDF'Syarifuddin RahmanNo ratings yet
- K360 IB4 X 2Document2 pagesK360 IB4 X 2Jason FilbertNo ratings yet
- Bodybuilder Module, Fault CodesDocument2 pagesBodybuilder Module, Fault CodesIzz Bahar100% (1)
- EAM127-24 - Interface Com S6 Scania PDFDocument2 pagesEAM127-24 - Interface Com S6 Scania PDFthyagoenergNo ratings yet
- The Star Truck With The Star Logo: Mercedes-Benz Genuine Accessories For The ActrosDocument44 pagesThe Star Truck With The Star Logo: Mercedes-Benz Genuine Accessories For The ActrosJose Ivan Rios OrjuelaNo ratings yet
- MR Fault CodeDocument17 pagesMR Fault Codeptsi rekrutNo ratings yet
- Mercedes Powershift Brochure: Experiences and Tips From Driving Experience For The Service AreaDocument11 pagesMercedes Powershift Brochure: Experiences and Tips From Driving Experience For The Service AreaMohamed AlaaNo ratings yet
- Directions Scania XPI DC16 102Document124 pagesDirections Scania XPI DC16 102khaledshekh133No ratings yet
- Install Front Axle Steering Angle Sensor at Steering GearDocument5 pagesInstall Front Axle Steering Angle Sensor at Steering GearAbi JithNo ratings yet
- Vag Option Codes PDFDocument261 pagesVag Option Codes PDFDinuBalanNo ratings yet
- Bw10235pc-Feb14 JTF CamcrankshaftDocument1 pageBw10235pc-Feb14 JTF CamcrankshaftRaulNo ratings yet
- Model 956 With Engine 936.9 (Except 936.991) Model 963, 964, 967Document1 pageModel 956 With Engine 936.9 (Except 936.991) Model 963, 964, 967rudi100% (1)
- Lubricants For New Axor: Interval NO Operating Fluid Vehicle Type MB Oil Sheet CapacityDocument1 pageLubricants For New Axor: Interval NO Operating Fluid Vehicle Type MB Oil Sheet CapacityrudiNo ratings yet
- Assemble Rear Wheel HubDocument1 pageAssemble Rear Wheel HubrudiNo ratings yet
- Tightening Procedure For Oil Pan BoltsDocument1 pageTightening Procedure For Oil Pan BoltsrudiNo ratings yet
- Perform Major Teach-In Process On Control UnitDocument1 pagePerform Major Teach-In Process On Control UnitrudiNo ratings yet
- Lane Assistant Camera (SPA), Component DescriptionDocument1 pageLane Assistant Camera (SPA), Component DescriptionrudiNo ratings yet
- Remove - Install Cylinder Head CoverDocument1 pageRemove - Install Cylinder Head CoverrudiNo ratings yet
- Electronic Ignition Lock (EIS), Component DescriptionDocument2 pagesElectronic Ignition Lock (EIS), Component DescriptionrudiNo ratings yet
- Battery Disconnect Switch Control Unit, Component DescriptionDocument2 pagesBattery Disconnect Switch Control Unit, Component Descriptionrudi100% (3)
- Tire Pressure Monitor (TPM) Control Unit, Component DescriptionDocument1 pageTire Pressure Monitor (TPM) Control Unit, Component DescriptionrudiNo ratings yet
- PI Basic Information Actros SLTDocument36 pagesPI Basic Information Actros SLTrudi100% (1)
- Cab Sensor and Actuator Module (SCA), Component DescriptionDocument1 pageCab Sensor and Actuator Module (SCA), Component DescriptionrudiNo ratings yet
- Auxiliary Steering Axle (ASA) Control Unit, Component DescriptionDocument2 pagesAuxiliary Steering Axle (ASA) Control Unit, Component DescriptionrudiNo ratings yet
- ActrosDocument100 pagesActrosrudi93% (14)
- Frame Sensor and Actuator Module (SCH), Component Description PDFDocument1 pageFrame Sensor and Actuator Module (SCH), Component Description PDFrudiNo ratings yet
- Anti-Theft Alarm System (ATA) Control Unit, Component Description PDFDocument1 pageAnti-Theft Alarm System (ATA) Control Unit, Component Description PDFrudiNo ratings yet
- Component Description For Single Signal Acquisition and Actuation Module (SSAM) Control UnitDocument1 pageComponent Description For Single Signal Acquisition and Actuation Module (SSAM) Control UnitrudiNo ratings yet
- GF54.21-W-0009H Central Gateway (CGW) Control Unit, Component Description 12.04.2019Document1 pageGF54.21-W-0009H Central Gateway (CGW) Control Unit, Component Description 12.04.2019rudi100% (1)
- Standart Torque BoltDocument1 pageStandart Torque BoltrudiNo ratings yet
- Study of Mechanical and Electronic Properties Rare Earth IntermetallicsDocument11 pagesStudy of Mechanical and Electronic Properties Rare Earth IntermetallicsAnushree AnilNo ratings yet
- E-Line Pull Up & Dip Station: Installation SpecificationsDocument2 pagesE-Line Pull Up & Dip Station: Installation Specificationsw009No ratings yet
- 0208 DressingforsuccessDocument4 pages0208 DressingforsuccessNatKThNo ratings yet
- PDL 615 MSDDocument2 pagesPDL 615 MSDWalter DiazNo ratings yet
- Power Daily MINIBUS A50.13-ENGLISHDocument14 pagesPower Daily MINIBUS A50.13-ENGLISHadolfo pacoNo ratings yet
- To-HQ-02-073 Rev 00 Philosophy For Passive Fire Protection Systems - OnshoreDocument16 pagesTo-HQ-02-073 Rev 00 Philosophy For Passive Fire Protection Systems - OnshoreAHMED AMIRANo ratings yet
- Calculating Esal PDFDocument4 pagesCalculating Esal PDFAkua AlderNo ratings yet
- Test Method For Photovoltaic Module Ratings: Lynn, KevinDocument16 pagesTest Method For Photovoltaic Module Ratings: Lynn, KevinSonya ReddyNo ratings yet
- Wood Work Check ListDocument11 pagesWood Work Check ListbkgboqdraftsmanNo ratings yet
- Pro CT FantomDocument7 pagesPro CT FantomМилан ВучинићNo ratings yet
- Chapter 1 Introduction To ComputersDocument10 pagesChapter 1 Introduction To ComputersKate GuerreroNo ratings yet
- Qad Erp Solutions GuideDocument121 pagesQad Erp Solutions GuideLuis LezamaNo ratings yet
- United States Air Force Aircraft Accident Investigation Board ReportDocument37 pagesUnited States Air Force Aircraft Accident Investigation Board ReportKSNV News3LVNo ratings yet
- DBreeze Documentation ActualDocument133 pagesDBreeze Documentation ActualJackson HayesNo ratings yet
- LUMP MASS GoviDocument2 pagesLUMP MASS GoviSudip ShresthaNo ratings yet
- Process Control Assignment 2Document1 pageProcess Control Assignment 2Tanvir AhmedNo ratings yet
- Hydrodynamic Forces On Pipelines: Model Tests: M. B. Bryndum V. JacobsenDocument11 pagesHydrodynamic Forces On Pipelines: Model Tests: M. B. Bryndum V. JacobsenKumarJR86No ratings yet
- Credit Evaluation Process FlowDocument1 pageCredit Evaluation Process FlowAbby CifraNo ratings yet
- AVIONICS 16 Marks With AnsDocument32 pagesAVIONICS 16 Marks With Anssabari sabariNo ratings yet
- PZ3-Brinell-hardness PI E PDFDocument2 pagesPZ3-Brinell-hardness PI E PDFjimborenoNo ratings yet
- Inbound 4435889675498454681Document1 pageInbound 4435889675498454681keepersilent2No ratings yet
- Carnhill Design GuideDocument26 pagesCarnhill Design Guidenandodefaria100% (1)
- Concerns On Estimating Heat Release RateDocument9 pagesConcerns On Estimating Heat Release Rate1jess6No ratings yet
- 414CC3 Excel Template Prelim Shell and Tube Heat Exchanger Design Si UnitsDocument3 pages414CC3 Excel Template Prelim Shell and Tube Heat Exchanger Design Si UnitsGuruh Mehra MulyanaNo ratings yet
- 7-13-0001 Rev 6Document1 page7-13-0001 Rev 6cynideNo ratings yet
- Cebu City CIVIL STRUCTURAL PERMITfor Building PermitDocument2 pagesCebu City CIVIL STRUCTURAL PERMITfor Building PermitAudrey ChuaNo ratings yet
- Reviewer in Electricity and MagnetismDocument3 pagesReviewer in Electricity and MagnetismWayne David C. PadullonNo ratings yet
- Tar - 2011 - WoDocument3 pagesTar - 2011 - Wohamza brahmiNo ratings yet
- eTOM ModelDocument19 pageseTOM ModelzhadnanNo ratings yet